
Device productivity increases largely as the takt time gets short! |
| |
 |
Large improvement in specification
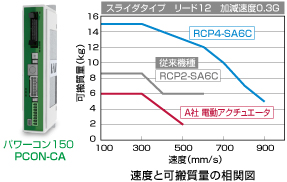 Realizes a maximum speed of 1.5 times, and maximum load capacity of above 2 times(※) of the conventional models by using the new controller,<Power Controller 150 PCON-CA>. Realizes a maximum speed of 1.5 times, and maximum load capacity of above 2 times(※) of the conventional models by using the new controller,<Power Controller 150 PCON-CA>.
(※) The increasing level is depending on the model.
|
 |
 |
Widened variation
The current most frequent used RCP2 series, the 3 Slider type models(SA5/SA6/SA7) and 2 Rod type models(RA5/RA6) are made available. Motor folded specification and cleanroom specification is added.
|
|
 |
The long expected Rod type Long Stroke(maximum 500mm) is configured now
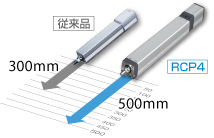 <Radial Cylinder RCP4-RA> <Radial Cylinder RCP4-RA>
By having a guide mechanism built in the Rod type, it enables a Long Stroke and allows moment loads. The rod wobbling and swaggings are largely reduced by the guide.
|
|
 |
Improvement in maintainability
The motor is replaceable by using 1 stopping screw. Contributes to a large decrease in maintenance time.
|
|
 |
Can replace current products
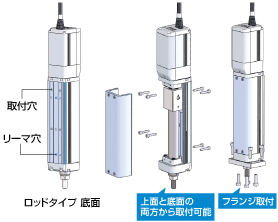 <Slider type> <Slider type>
The mounting hole is compatible to RCP2 Actuator, making it possible to replace RCP2 actuator with RCP4.
<Rod type>
T-shaped slot of RCP2 can be changed to the mounting hole just as of Slider type, and set reamer hole, improving the mounting repeatability.
|
 |

Mounted with new functions increasing the maintainability! |
 |
| |
|
|
Movement number integrating function
Production volumes and rate of operations can be known through the movement number integrating function.
|
|
|
Mileage integrating function
The maintenance timing can be known through the mileage integrating function.
|
|
|
Calendar function
The occurred time of alarms, etc, can be recorded through calendar function.
|
|
|
Controller controlling method
One of the next 3 types can be selected to control a controller
①Positioner type which is operatable by ON/OFF of PIO
②Pulse Line type which operates by pulse sent from positioning unit
③Field Network type which operates by position data sent via networks
.
|
|
|
Silent motor function mounted
The pulse motor's unique noise which occurs in low speed, is made less.
|
|
 and ROBO Cylinder PC Software")
Configure a suitable operation condition by Smart Tuning Function |
| |
|
Smart Tuning Function
A new function added to ROBO Cylinder PC Software(Ver.8.03.00.00 and above) and Touch Panel Teaching(CON-PTA model), which automatically configures the suitable acceleration/deceleration and speed based on conveying loads, by just entering the actuator model, conveying loads, etc.
※ Please refer to the page here for Touch Panel Teaching(CON-PTA) information. |
