
Product feature





Attachment orientation



Main specification
| Heading | Contents | |
|---|---|---|
| Lead | Trapezoidal Screw Lead (mm) | 1.5 |
| Pulley Deceleration Ratio | 1.25 | |
| Gripping Motion | Max. Gripping Force (N)(Both sides) | 90 |
| Gripping speed (mm/s) (per side) | 5 | |
| Approaching Motion | Max. Speed (mm/s)(Per side) | 90 |
| Min. Speed (mm/s)(Per side) | 5 | |
| Rated Acceleration/Deceleration (G)(Per side) | 0.3 | |
| Max. Acceleration/Deceleration (G)(Per side) | 0.3 | |
| Brake | Brake specification | - |
| Brake retention force (N) | - | |
| Stroke | Min. Stroke (mm)(Per side) | 15 |
| Max. Stroke (mm)(Per side) | 15 | |
| Heading | Contents | |
|---|---|---|
| Drive system | Timing belt + Left/Right hand trapezoidal sliding screws | |
| Accuracy of Repeating Positioning. | ±0.05mm | |
| Lost motion | - (Can't be indicated because this is a 2-point positioning function. ) | |
| Backlash (Per side) | 0.15mm or less | |
| Linear guide | Finite Guide | |
| Allowable static moment value | Ma : 3.60 N・m | |
| Mb : 3.60 N・m | ||
| Mc : 10.2 N・m | ||
| Main part materials (Note 10) | Frame | Black alumite treated aluminum |
| Finger attachment | Solution treated stainless steel (SCS13) | |
| Actuator cable | Polyvinyl chloride (PVC) | |
| Vertical Payload (Note 11) | 598N | |
| Ambient operating temperature and humidity | 0 - 40℃, RH 85% and below (no condensation) | |
| Protection grade | IP54 equivalent | |
| Vibration resistant/Shock resistant | 4.9m/s2 | |
| Compatible to overseas standards | CE mark, RoHS compliant | |
| Motor type | Pulse motor (□28) (power capacity: Max. 2A) | |
| Encoder type | Incremental / Battery-less absolute | |
| Encoder pulse No. | 16384 pulse/rev | |
| Delivery | Written in [Reference for delivery] section of the homepage | |
(Note 10) Please refer to page 1-336 for the details.
(Note 11) If the product is used with a load exceeding the above value, it may shorten its life or cause damage.
Adaptive controller
(Note) EC series has their controller built-in themselves. See page 2 769 for details of the built-in controller.
Oversea specification


Important notes on selection
| (1) The maximum opening/closing speed of the "Main specification" indicates the operating speed of one side. The relative operating speed will be the double. (2) The maximum gripping force value in "Main specification" is the sum of the gripping forces of both fingers when the gripping point distance is 40 and the overhang distance is 40. For the actual work mass that can be transported, refer to "Checking the Gripping Point Distance". (3) Be sure to use push-motion operation to grip the work. (4) The self-lock mechanism maintains the force to grip the workpiece even when the power is turned off. (However, this does not guarantee that the workpiece held will not drop. ) To remove the workpiece being gripped when the power is turned off, turn the opening/closing screw on the side or remove the finger attachment before removing the workpiece. (5) If you select the water-proof joint cable specification (optional model: JYW), the attached actuator cable will be the water-proof joint cable specification. |
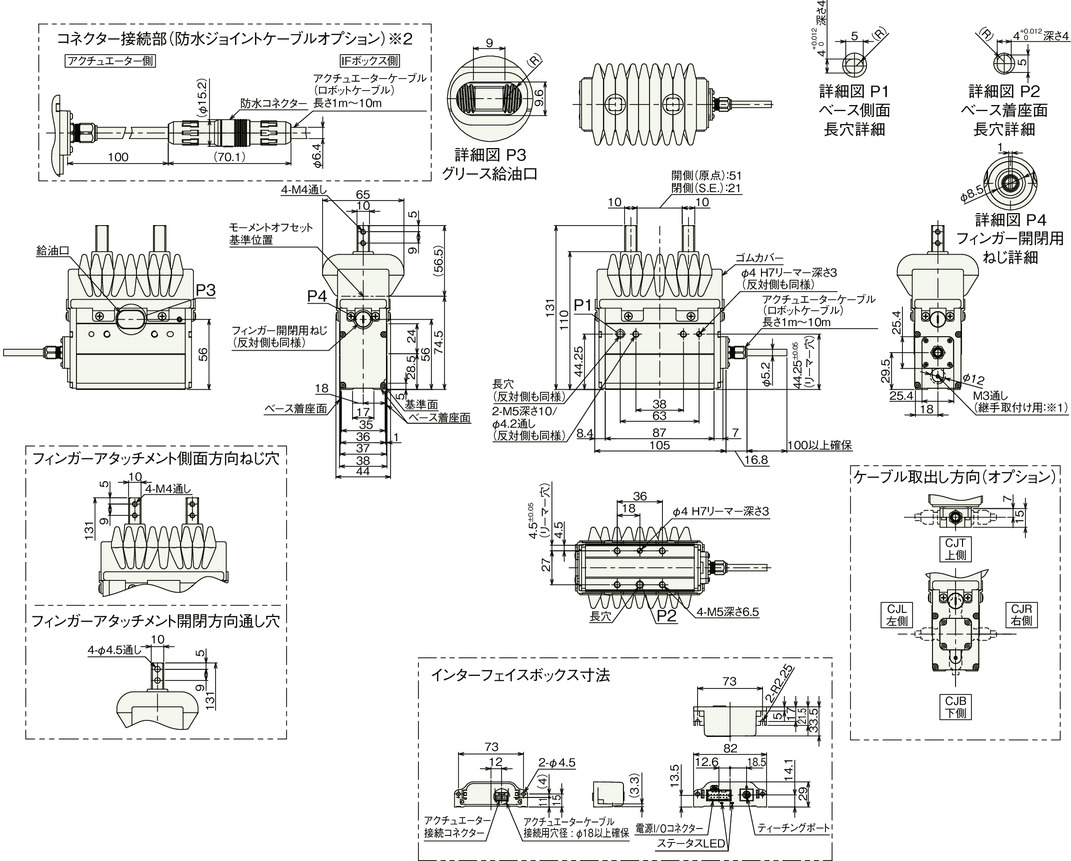
Dimension drawing

S.E.: Stroke end
※1 Plugged with a set screw to prevent foreign matter from entering. Please remove it if you want to install an intake/exhaust joint (usually not used).
*2 If the connector connection part is in an unstable position where it is exposed to vibrations, etc., secure the cable with a cable tie, etc. to prevent it from moving.
Align the arrows printed on the connector and insert it all the way.
(Note) Home position is at the open side as standard. If you want the origin to be on the closing side, please specify the option (model: NM).
(Note) The actuator cable exit direction is at the rear as standard, but it can be changed to one of the four directions by specifying an option.
(Note) The interface box is not dust-proof or drip-proof. Install it in a place where it will not be exposed to water.
Mass by stroke length
| Heading | Contents |
|---|---|
| Mass | 0.77kg |
Checking the Gripping Point Distance
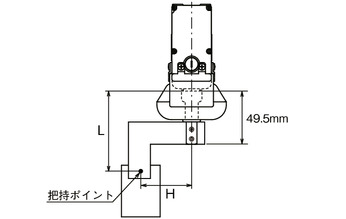
When using, make sure that the distance (L, H) from the finger (claw) mounting surface to the gripping point is within the range of the graph.
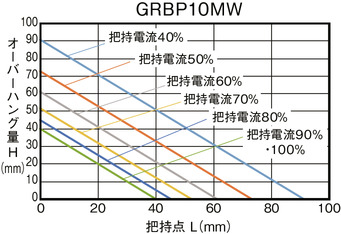
(Note) If the limit range is exceeded, an excessive moment will be applied to the finger sliding part and the internal mechanism, which may adversely affect the service life.
Gripping Force
■Correlation Diagram of Gripping Force and Current Limit Value
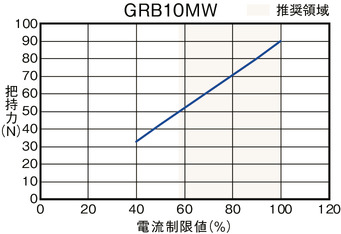
(Note) This is the total value of both fingers when the grip point distance (L, H) is 40.
(Note) Values indicated are for reference only. There is a variation of approximately 0-60%. The possibility of variation increases especially when the current limit value outside the recommended area (coloured area in the graph) is set.
(Note) The movement speed during gripping (pushing) motion is fixed at 5mm/s.
■Reference for Gripping Point Distance and Gripping Force
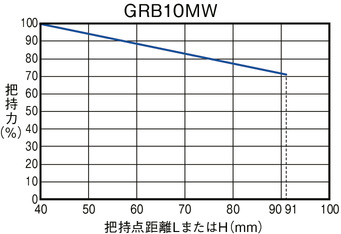
(Note) The gripping force is based on the extended position when the maximum gripping force is defined as 100%. Results may vary depending on the rigidity of the finger attachment used.