
Product feature



Attachment orientation



Main specification
| Heading | Contents | ||||
|---|---|---|---|---|---|
| Lead | Ball screw lead (mm) | 6 | 4 | 2 | |
| Horizontal | Load capacity | Maximum load capacity (kg) | 2.5 | 4 | 8 |
| Speed/ Acceleration/Deceleration | Maximum speed (mm/s) | 300 | 200 | 100 | |
| Minimum speed (mm/s) | 7.5 | 5 | 2.5 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 1 | 1 | 0.3 | ||
| Vertical | Load capacity | Maximum load capacity (kg) | 1 | 1.5 | 2.5 |
| Speed/ Acceleration/Deceleration | Maximum speed (mm/s) | 300 | 200 | 100 | |
| Minimum speed (mm/s) | 7.5 | 5 | 2.5 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 0.5 | 0.5 | 0.3 | ||
| Pressing motion | Max. pressing thrust (N) | 30 | 45 | 90 | |
| Max. pressing speed (mm/s) | 20 | 20 | 20 | ||
| Brake | Brake specification | Non-excitation electromagnetic brake | |||
| Brake retention force (kgf) | 1 | 1.5 | 2.5 | ||
| Stroke | Minimum stroke (mm) | 30 | 30 | 30 | |
| Maximum stroke (mm) | 50 | 50 | 50 | ||
| Stroke pitch (mm) | 20 | 20 | 20 | ||
| Heading | Contents |
|---|---|
| Drive system | Ball screw φ6mm, rolled C10 |
| Accuracy of Repeating Positioning. | ±0.05mm |
| Lost motion | - (Can't be shown as this is a 2-point positioning function) |
| Non-rotational accuracy of rod | - |
| Life time traveling distance | 5000km, or 50 million round trips |
| Ambient operating temperature and humidity | 0 - 40℃, 85% RH Max (Non-condensing) |
| Protection grade | IP20 |
| Vibration resistant/Shock resistant | 4.9m/s2 |
| Compatible to overseas standards | CE mark, RoHS compliant |
| Motor type | Pulse motor |
| Encoder type | Incremental / Battery-less absolute |
| Encoder pulse number | 800 pulse/rev |
| Delivery | Written in [Reference for delivery] section of the homepage |
Load capacity by speed and acceleration table
The base unit for load capacity is kilogram (kg).
| Orientation | Horizontal | Vertical | ||||
|---|---|---|---|---|---|---|
| Speed | Acceleration/Deceleration (G) | |||||
| (mm/s) | 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 |
| 0 | 2.5 | 2.5 | 1.5 | 1.5 | 1 | 1 |
| 300 | 2.5 | 2.5 | 1.5 | 1.5 | 1 | 1 |
| Orientation | Horizontal | Vertical | ||||
|---|---|---|---|---|---|---|
| Speed | Acceleration/Deceleration (G) | |||||
| (mm/s) | 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 |
| 0 | 4 | 4 | 2 | 2 | 1.5 | 1.5 |
| 200 | 4 | 4 | 2 | 2 | 1.5 | 1.5 |
| Orientation | Horizontal | Vertical |
|---|---|---|
| Speed | Acceleration/Deceleration (G) | |
| (mm/s) | 0.3 | 0.3 |
| 0 | 8 | 2.5 |
| 100 | 8 | 2.5 |
Stroke and maximum speed
(Measured in mm/s)
| Lead (mm) | 30 (mm) | 50 (mm) |
|---|---|---|
| 6 | 300 | |
| 4 | 200 | |
| 2 | 100 | |
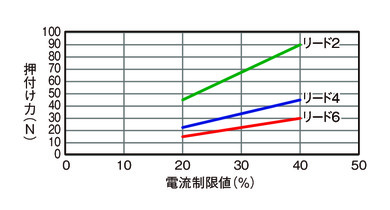
Correlation diagram of pressing force and current limiting value
Adaptive controller
(Note) EC series has their controller built-in themselves. See page 285 for further details on the built-in controller.
Important notes on selection
| (1) Since the feed screw does not have a rotation stopping mechanism, please add a rotation stopping mechanism such as a guide to the tip of the feed screw when using. (Doesn't move front or back without a detent mechanism to suppress rotation of the feeding screw) Floating joints shall not be used to connect the rod to the detent mechanism. Refer to page 388 for mounting method and conditions. (2) Payload shown in the "main specification" is it's maximum value. (3) Horizontal load capacity shown assumes an operation running with an external guide. Do not apply external force from directions other than the moving direction of the rod. (4) Refer "Correlation of pressing force and current limit value" for further information on pressing motion. Pressing force shown are their standard value. Please see page 396 for important notes. (5) Safety measures may be required depending on the attachment orientation. See page 379 for further details. |
Oversea specification


Dimension drawing

ST: Stroke
M.E.: Mechanical end
S.E.: Stroke end
(Note) The rod moves to the M.E. upon returning to origin, so please take precaution that it may not interfere with anything while the returning process is running.
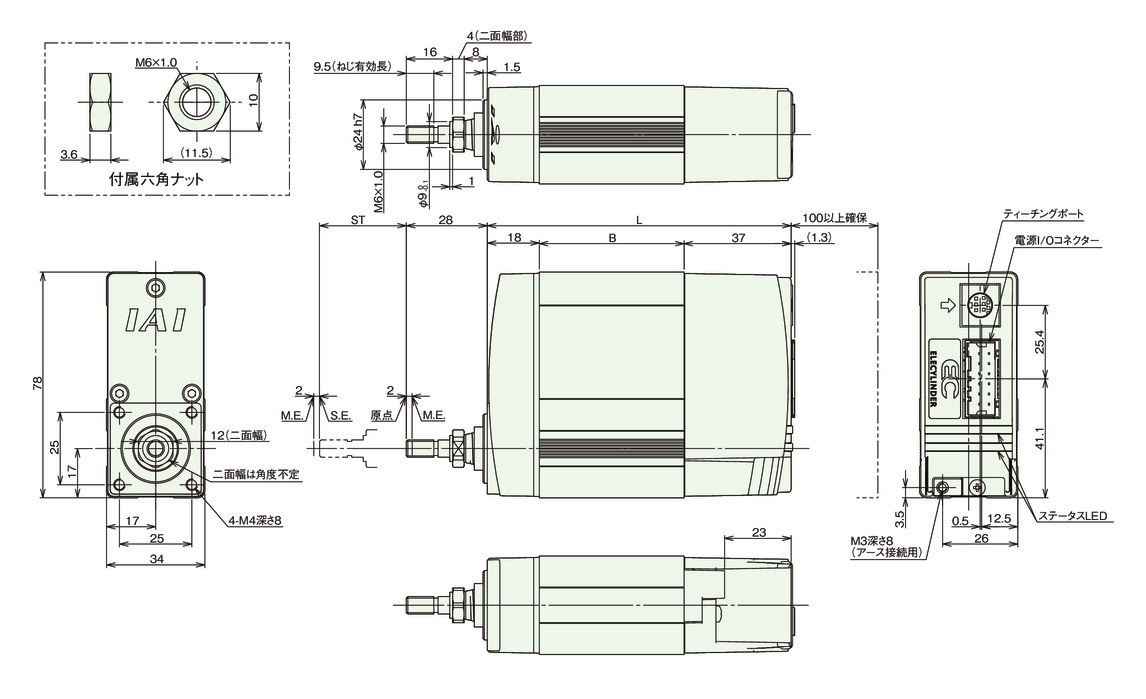
Dimension by stroke length
| Encoder type | Incremental | Battery-less absolute | |||
|---|---|---|---|---|---|
| Stroke | 30 | 50 | 30 | 50 | |
| L | Brake present | 105 | 125 | 125 | 125 |
| Brake absent | 135 | 135 | 155 | 155 | |
| B | Brake present | 50 | 70 | 70 | 70 |
| Brake absent | 80 | 80 | 100 | 100 | |
Mass by stroke length
| Encoder type | Incremental | Battery-less absolute | |||
|---|---|---|---|---|---|
| Stroke | 30 | 50 | 30 | 50 | |
| Mass (kg) | Brake present | 0.5 | 0.6 | 0.6 | 0.6 |
| Brake absent | 0.7 | 0.7 | 0.7 | 0.7 | |