Product feature


Attachment orientation


Main specification
| Heading | Contents | ||||
|---|---|---|---|---|---|
| Lead | Ball screw lead (mm) | 20 | 6 | 3 | |
| Horizontal | Load capacity | Max. load capacity (kg) (Power saving disabled) | 6 | 40 | 60 |
| Max. load capacity (kg) (Power saving enabled) | 6 | 40 | 40 | ||
| Speed/ Acceleration/Deceleration | Maximum speed (mm/s) | 800 | 450 | 225 | |
| Minimum speed (mm/s) | 25 | 8 | 4 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 1 | 1 | 1 | ||
| Vertical | Load capacity | Max. load capacity (kg) (Power saving disabled) | 0.5 | 7 | 12.5 |
| Max. load capacity (kg) (Power saving enabled) | 0.5 | 7 | 12.5 | ||
| Speed/ Acceleration/Deceleration | Maximum speed (mm/s) | 640 | 400 | 200 | |
| Minimum speed (mm/s) | 25 | 8 | 4 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 0.5 | 0.5 | 0.5 | ||
| Pressing motion | Max. pressing thrust (N) | 67 | 224 | 449 | |
| Max. pressing speed (mm/s) | 25 | 20 | 20 | ||
| Brake | Brake specification | Non-excitation electromagnetic brake | |||
| Brake retention force (kgf) | 0.5 | 7 | 12.5 | ||
| Stroke | Minimum stroke (mm) | 50 | 50 | 50 | |
| Maximum stroke (mm) | 300 | 300 | 300 | ||
| Stroke pitch (mm) | 50 | 50 | 50 | ||
| Heading | Contents |
|---|---|
| Drive system | Ball screw φ10mm, rolled C10 |
| Accuracy of Repeating Positioning. | Lead 3/6: ±0.02mm, lead 20: ±0.03mm |
| Lost motion | - (Can't be indicated because this is a 2-point positioning function. ) |
| Rod | Φ25mm Material: Hard alumite treated aluminum |
| Guide shaft | SUJ2 |
| Front bracket | Material: White alumite treated aluminum |
| Non-rotational accuracy of rod | ±0.03 degree |
| Ambient operating temperature and humidity | 0 - 40℃, RH 85% and below (no condensation) |
| Protection grade | IP20 |
| Vibration resistant/Shock resistant | 4.9m/s2 |
| Compatible to overseas standards | CE mark, RoHS compliant |
| Motor type | Pulse motor (□42) (power capacity: Max. 4.2A) |
| Encoder type | Incremental / Battery-less absolute |
| Encoder pulse No. | 800 pulse/rev |
| Delivery | Written in [Reference for delivery] section of the homepage |
Payload capacity table by speed/acceleration *Power saving setting is disabled by default. Refer to page 1-23 for further details.
Power saving setting disabled (Power mode) The unit of payload is kg. Empty column refers to inoperable motion.
| Orientation | Horizontal | Vertical | ||||
|---|---|---|---|---|---|---|
| Speed (mm/s) | Acceleration (G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 6 | 6 | 5 | 5 | 0.5 | 0.5 |
| 160 | 6 | 6 | 5 | 5 | 0.5 | 0.5 |
| 320 | 6 | 6 | 5 | 3 | 0.5 | 0.5 |
| 480 | 6 | 6 | 5 | 3 | 0.5 | 0.5 |
| 640 | 6 | 4 | 3 | 2 | 0.5 | 0.5 |
| 800 | 4 | 3 | ||||
| Orientation | Horizontal | Vertical | ||||
|---|---|---|---|---|---|---|
| Speed (mm/s) | Acceleration (G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 40 | 35 | 30 | 25 | 7 | 7 |
| 50 | 40 | 35 | 30 | 25 | 7 | 7 |
| 90 | 40 | 35 | 30 | 25 | 7 | 7 |
| 160 | 40 | 30 | 25 | 20 | 7 | 7 |
| 250 | 40 | 27.5 | 22.5 | 18 | 7 | 7 |
| 350 | 20 | 10 | 8 | 5 | 2.5 | 2 |
| 400 | 10 | 3 | 3 | 0.5 | ||
| 450 | 3 | |||||
| Orientation | Horizontal | Vertical | ||||
|---|---|---|---|---|---|---|
| Speed (mm/s) | Acceleration (G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 60 | 50 | 45 | 40 | 12.5 | 12.5 |
| 45 | 60 | 50 | 45 | 40 | 12.5 | 12.5 |
| 80 | 60 | 50 | 45 | 40 | 12.5 | 12.5 |
| 125 | 60 | 45 | 35 | 30 | 10 | 10 |
| 175 | 40 | 35 | 25 | 15 | 6 | 5 |
| 200 | 30 | 20 | 10 | 3 | 3.5 | 3.5 |
| 225 | 5 | |||||
Power saving setting enabled (energy saving mode) The unit of payload is kg. Empty column refers to inoperable motion.
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed (mm/s) | Acceleration (G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 6 | 5 | 0.5 |
| 160 | 6 | 5 | 0.5 |
| 310 | 6 | 5 | 0.5 |
| 480 | 4 | 3 | 0.5 |
| 640 | 1 | 1 | |
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed (mm/s) | Acceleration (G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 40 | 20 | 7 |
| 50 | 40 | 20 | 7 |
| 90 | 40 | 20 | 7 |
| 160 | 40 | 20 | 7 |
| 200 | 35 | 18 | 5 |
| 250 | 10 | 5 | 2.5 |
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed (mm/s) | Acceleration (G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 40 | 25 | 12.5 |
| 25 | 40 | 25 | 12.5 |
| 45 | 40 | 25 | 12.5 |
| 80 | 40 | 25 | 12 |
| 95 | 40 | 20 | 9 |
| 125 | 40 | 10 | 5 |
Stroke and maximum speed
(Measured in mm/s)
| Lead (mm) | Energy saving setting | 50 - 200 (per 50mm) | 250 (mm) | 300 (mm) |
|---|---|---|---|---|
| 20 | Invalid | 800<640> | ||
| Valid | 640<480> | |||
| 6 | Invalid | 450<400> | 370<350> | 265 |
| Valid | 250 | |||
| 3 | Invalid | 225<200> | 185 | 130 |
| Valid | 125 | |||
(Note) < > is applicable when operated vertically.
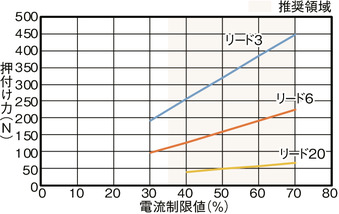
Correlation diagram of pressing force and current limiting value
Adaptive controller
(Note) EC series has their controller built-in themselves. See page 2 769 for details of the built-in controller.
Oversea specification


Important notes on selection
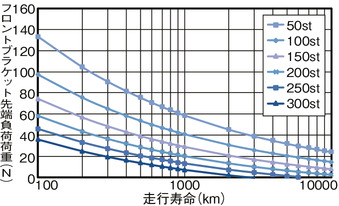
| (1) The value shown for load capacity in "Main specification" refers to the maximum value. (2) The horizontal payload assumes that a guide is used in combination to prevent radial load and moment load from being applied to the rod. If you decide not to install a guide, please refer to "Front bracket tip load and running life". (3) Refer "Correlation of pressing force and current limit value" if you may need to operate pressing motion. Pressing force shown are their standard value. Refer page 1- 315 for important points to be taken note of. |
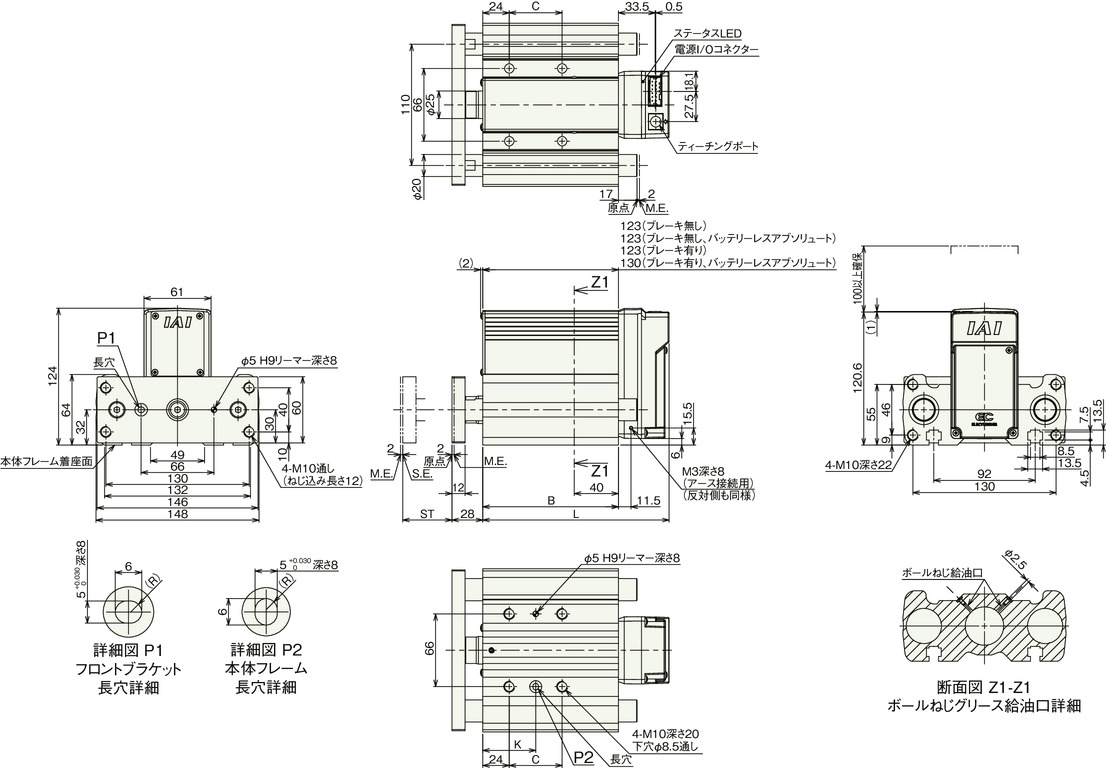
Dimension drawing

ST: Stroke
M.E.: Mechanical end
S.E.: Stroke end
(Note) When returning to the home position, the rod moves to M.E. Please be careful of interference with surrounding objects.
Dimension by stroke length
| Stroke | 50 | 100 | 150 | 200 | 250 | 300 |
|---|---|---|---|---|---|---|
| L | 169 | 219 | 269 | 319 | 369 | 419 |
| B | 123 | 173 | 223 | 273 | 323 | 373 |
| C | 48 | 48 | 124 | 124 | 200 | 200 |
| K | 48 | 48 | 86 | 86 | 124 | 124 |
Mass by stroke length
| Stroke | 50 | 100 | 150 | 200 | 250 | 300 | |
|---|---|---|---|---|---|---|---|
| Mass (kg) | Without brake | 4.3 | 5.4 | 6.5 | 7.6 | 8.7 | 9.8 |
| With brake | 4.5 | 5.6 | 6.7 | 7.8 | 8.9 | 10 | |
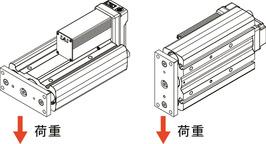
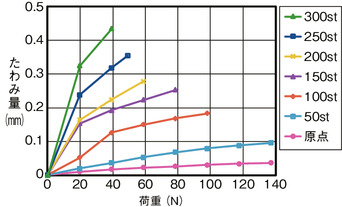
Amount of deflection at the front bracket tip
Guide (horizontal configuration)
Guide (vertical configuration)

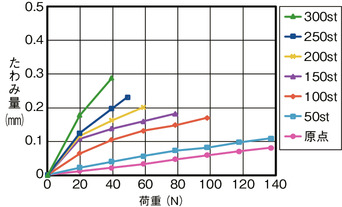
(Note) The amount of deflection at the front bracket tip is a guideline.
Allowable rotation torque of the front bracket
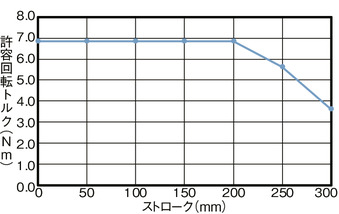
(Note) Please use the rotating torque within the allowable range shown in the graph.
Front bracket tip load and running life