

Maximum speed by stroke
(Measured in mm/s)
| 200 | 250 | 300 | 400 | 500 | 600 | 700 | 800~2250 | ||
|---|---|---|---|---|---|---|---|---|---|
| X axis | - | 1300 | |||||||
| Y axis | 1200 | - | - | ||||||
Payload by acceleration
The unit in the table is kg.
| Y-axis stroke | |||||||
|---|---|---|---|---|---|---|---|
| 200 | 300 | 400 | 500 | 600 | 700 | ||
| Acceleration | 0.3 | 40.0 | 40.0 | 33.0 | 27.3 | 22.9 | 19.3 |
| 0.4 | 30.0 | 30.0 | 30.0 | 27.3 | 22.9 | 19.3 | |
| 0.5 | 21.6 | 21.6 | 21.6 | 21.6 | 21.6 | 19.3 | |
| 0.6 | 18.0 | 18.0 | 18.0 | 18.0 | 17.5 | 16.6 | |
| 0.7 | 15.3 | 14.9 | 14.0 | 13.0 | 12.1 | 11.2 | |
| 0.8 | 12.2 | 11.3 | 10.4 | 9.4 | 8.5 | 7.6 | |
| 0.9 | 9.5 | 8.6 | 7.7 | 6.7 | 5.8 | 4.9 | |
| 1.0 | 6.8 | 5.9 | 5.0 | - | - | - | |
Adaptive controller
Please refer to each controller page. (Page 8-8) Please note that the controller is sold separately.
Oversea specification

Important notes on selection
| (1) Value shown in stroke column of the model item is indicated in cm (centimeter) in the model. (2) The cable length is the length from the X-axis connector box to the controller (from the X-axis actuator cable for the cable track type). The standard length is 3m or 5m, but other lengths are also available in meters. Available lengths are up to 20m. (3) The rated acceleration is 0.3G. It can operate up to 1G, but the payload will decrease if the acceleration is increased. |
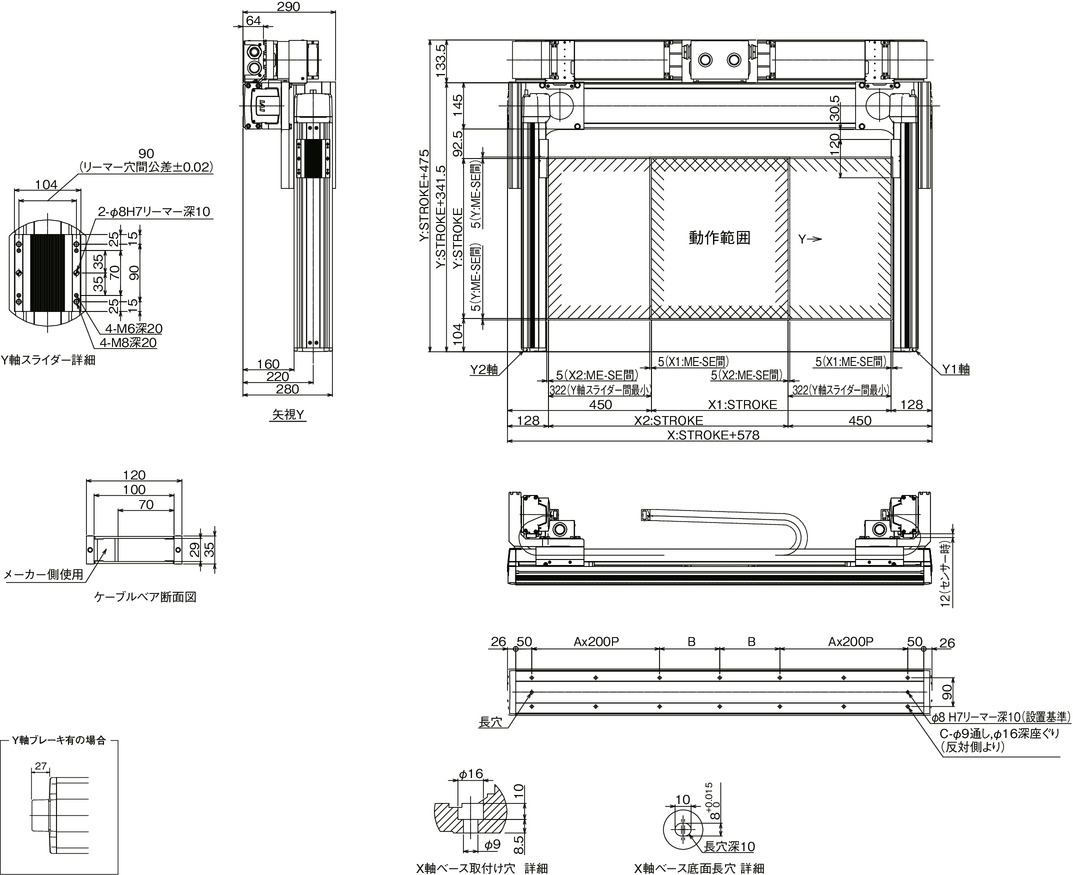
Dimension drawing

ICSPA4-B3NA1M-CT (cable track type)
ME: Mechanical end
SE: Stroke end
(Note) The combined position of the drawing is the home position. To change the home, specify the option NM. Please note that return adjustment is required when changing the home after delivery.
| X-stroke | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | 1100 | 1150 | 1200 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 |
| B | 138 | 163 | 188 | 213 | 238 | 263 | 288 | 113 | 138 | 163 | 188 | 213 | 238 | 263 | 288 | 313 | 138 | 163 | 188 | 213 |
| C | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 18 | 18 | 18 | 18 |
| X-stroke | 1250 | 1300 | 1350 | 1400 | 1450 | 1500 | 1550 | 1600 | 1650 | 1700 | 1750 | 1800 | 1850 | 1900 | 1950 | 2000 | 2050 | 2100 | 2150 | 2200 | 2250 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 6 |
| B | 238 | 263 | 288 | 313 | 138 | 163 | 188 | 213 | 238 | 263 | 288 | 313 | 138 | 163 | 188 | 213 | 238 | 263 | 288 | 313 | 138 |
| C | 18 | 18 | 18 | 18 | 22 | 22 | 22 | 22 | 22 | 22 | 22 | 22 | 26 | 26 | 26 | 26 | 26 | 26 | 26 | 26 | 30 |
Common specifications
| Drive system | Ball screw Rolled C5 equivalent |
| Accuracy of Repeating Positioning. | ±0.01mm |
| Lost motion | 0.02mm or less |
| Guide | Integrated base type |
| Base | Material: White alumite treated aluminum |
| X-axis motor output/lead | 400W/20mm |
| Y-axis motor output/lead | 200W/20mm |
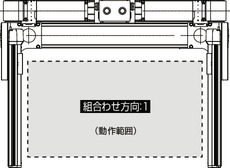
XY Configuration Direction
Model content
| XY configuration direction (Note 1) | Model |
|---|---|
| 1 | ICSPA4-B3NA1M-①-②③-④⑤-T□-⑥-⑦ |
(Note 1) Please refer to the diagram below for the XY configuration direction. Refer to the table below for the contents of above model numbers ① to ⑦.
Symbol in model code
| Number | Contents | Notation |
|---|---|---|
| ① | Encoder type | A: Absolute I : Incremental |
| ② | X-axis stroke | 25: 250mm - 225: 2250mm |
| ③ | X-axis option | See option table |
| ④ | Y-axis stroke | 20: 200mm - 70: 700mm |
| ⑤ | Y-axis option | See option table |
| ⑥ | Cable Length | 3L: 3m 5L: 5m □L: □m |
| ⑦ | Y-axis cable wiring | CT: Cable track |
Component axis
| Component axis | Model | Reference page |
|---|---|---|
| X axis | NS-LXMMA-①-400-20-②-T□-③-NT1 | 3-621, General Catalogue 2021 |
| Y1-axis | ISPA-MYM-①-200-20-④-T□-⑤ | - |
| Y2-axis | ISPA-MYM-①-200-20-④-T□-⑤ | - |
(Note) For the above model numbers ① to ⑤, refer to the symbol in model code table above. The stroke is indicated in mm (millimeter).
(Note) For the nut rotation type/large size linear, the cable track is attached even with a single axis. However, when assembling to a cartesian robot, a separate cable track is used, so the single axis has no cable track (NT1) specifications.