Product feature


Model specification
| Model | Axis Configuration | Arm length (mm) | Motor capacity (W) | Operating range | Positioning repeatability (mm) (Note 1) | Max. PTP operation speed (Note 2) | Standard cycle time (s) (Note 3) | Load capacity (kg) (Note 4) | Control range of 3rd axis (vertical axis) push force (N) | Allowable load of 4th axis | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Rated | Maximum | Upper limit (Note 5) | Lower limit (Note 5) | Allowable moment of inertia (kg·m2) (Note 6) | Allowable torque (N·m) | |||||||||
| IX-NNN1805-①-T2-② | 1-Axis | 1st arm | 105 | 12 | ±125 degree | ±0.01 (XY) | 2555mm/s (Resultant speed) | 0.38 | 0.2 | 1.0 | 14.7 | 9.8 | 0.000386 | 0.13 |
| 2-Axis | 2nd arm | 75 | 12 | ±145 degree | ||||||||||
| 3-Axis | Vertical axis | - | 12 | 50mm | ±0.010 | 720mm/s | ||||||||
| 4-Axis | Rotating shaft | - | 60 | ±360 degree | ±0.005 | 1800 degree/s | ||||||||
Legend ① Cable length ② Option
Actuator specification
| Heading | Contents |
|---|---|
| Encoder type | Absolute |
| User wiring | 8-core AWG26 shielded connector: SMP-08V-NC (JST) |
| User piping | Air tube (O.D. ø3, I.D. ø2) x 2 (Normal working pressure 0.7 MPa) |
| Alarm indicator light (Note 7) | 1 small red LED indicator light (requires 24 V DC power supply) |
| Ambient temperature/humidity | Temperature 0-40 ℃ Humidity 20-85% RH or less (no condensation) |
| Body weight | 3.0kg |
| Cable length (Note 9) | 3L: 3m (standard) 5L: 5m |
Adaptive controller
The actuators introduced in this page are controllable using the controllers shown below. Please select their type based on intended usage.
| Name | Appearance | Max. connectable axis No. | Power source voltage | Control method | Maximum positioning points | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positioner | Pulse train | Program | Network ※Select | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| XSEL-PX/QX |  | 6 | Three-phase AC200V | - | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
| XSEL-RAX/SAX XSEL-RAXD/SAXD (for IX) |  | 8 | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | - | - | - | 36666 (depending on type) | |
(Note) Refer to page 7-17 for network abbreviation symbols such as DV and CC.
(Note) It can control up to SCARA + 4-axis robot.
(Note) Select XSEL-RAXD / SAXD when connecting two SCARA robots. However, the SCARA robots may not be able to be connected depending on the combination. Refer to page 7-289.
Oversea specification


(Note) CE is optional.
Important notes on selection
| (1) Refer to page 4-675 for (Note 1) to (Note 10). (2) SCARA robots cannot operate continuously at 100% speed and acceleration. Refer to the technical information on page 1-507 for operating conditions. (3) An adjustment jig is required to perform absolute reset which is needed whenever the encoder absolute data was lost. Refer to page 4-742 for further details. (4) Flange option is available. Refer to page 4-742 for further details. |
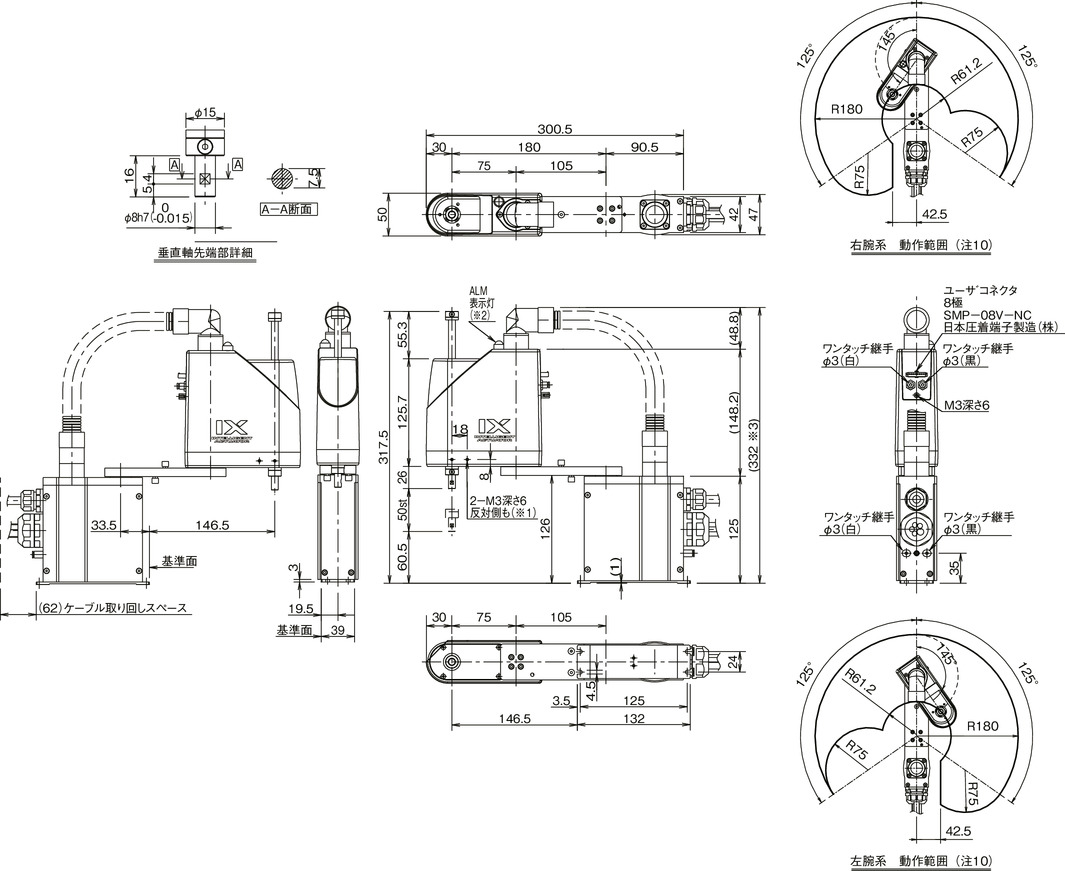
Dimension drawing

*1 The 2-M3 depth 6 hole penetrates the arm. Please note that long mounting screws will interfere with internal mechanical components.
*2 The ALM indicator lights up when the user takes the signal from the I/O output of the controller and applies 24V DC to the LED terminal in the user wiring.
*3 The height dimension varies depending on the actuator posture at the specified position. The noted value refers to the maximum guideline value.