Product feature


Attachment orientation


Main specification
| Heading | Contents | ||
|---|---|---|---|
| 4-axis type | |||
| Maximum load capacity (kg) (Note 1) | 50 | ||
| Speed (Note 2) | Maximum resultant speed (mm/s) | 7540 | |
| Maximum speed of each axis | 1st arm (degree/s) | 280 | |
| 2nd arm (degree/s) | 380 | ||
| Vertical axis (mm/s) | 1200 | ||
| Rotating axis (degree/s) | 920 | ||
| Push force (N) (Note 3) | Upper limit | 570 | |
| Minimum | 70 | ||
| Arm length (mm) | 1000 | ||
| Arm length of each axis (mm) | 1st arm | 600 | |
| 2nd arm | 400 | ||
| Operating range of each axis | 1st arm (degree) | ±137 | |
| 2nd arm (degree) | ±142 | ||
| Vertical axis (mm) | 400 | ||
| Rotating axis (degree) | ±360 | ||
| Heading | Contents | |
|---|---|---|
| 4-axis type | ||
| Repeated positioning accuracy (Note 4) | Horizontal plane | ±0.04mm |
| Vertical axis | ±0.02mm | |
| Rotating shaft | ±0.01 degrees | |
| User wiring | 10 cores (9 cores + shield) AWG24 (rated 30V/MAX1A) | |
| User piping | Outer diameter φ6 Inner diameter φ4 3 air tubes (max. working pressure 0.6MPa) | |
| LED indicator light (Note 5) | 1 small amber LED indicator light (24V DC supply required) | |
| Brake release switch (Note 6) | Brake release switch for vertical axis fall prevention | |
| Tip shaft | Allowable torque | 15N・m |
| Allowable load moment | 48N・m | |
| Ambient operating temperature and humidity | 0-40℃, 20-85% RH or less (no condensation) | |
| Protection grade | IP10 | |
| Vibration resistant/Shock resistant | No shock or vibration | |
| Noise (Note 7) | Below 85dB | |
| Compatible to overseas standards | CE mark, RoHS compliant | |
| Motor type | AC servo motor | |
| Motor capacity | 1st arm | 1000W |
| 2nd arm | 750W | |
| Vertical axis | 600W | |
| Rotating shaft | 200W | |
| Encoder type | Battery-less absolute | |
| Encoder pulse No. | 131072 pulse/rev | |
| Delivery | Written in [Reference for delivery] section of the homepage | |
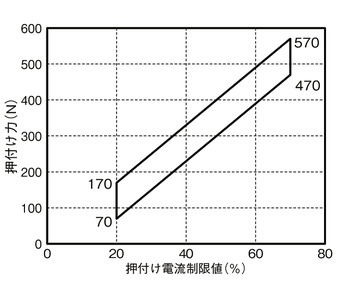
Correlation diagram of pushing force and current limit value (reference value)
This is the pushing force at the tip of the vertical shaft. (Note 3)
Adaptive controller
The actuators introduced in this page are controllable using the controllers shown below. Please select their type based on intended usage.
| Name | Appearance | Max. connectable axis No. | Power source voltage | Control method | Maximum positioning points | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positioner | Pulse train | Program | Network *Select | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| XSEL-SAX4 (for IXA) |  | 4 | Three-phase AC200V | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | - | - | - | 36666 |
(Note) For network abbreviations such as DV and CC, please refer to page 8-15.
Oversea specification


Important notes on selection
| (1) Please refer to page 5-871 for (Note 1) to (Note 8). (2) The maximum setting value for acceleration/deceleration is determined by the mass of the transported object, the distance traveled, and the location. An overload error may occur if continuous operation was performed with the maximum set value. When performing continuous operation, lower the acceleration/deceleration or set a stop time after acceleration/deceleration based on the duty ratio (reference). (3) Absolute reset is necessary whenever the motor is replaced. An adjustment jig is required to reset the absolute of the rotating axis. Refer to page 5-864 for further details. (4) SCARA robots cannot operate continuously at 100% speed and acceleration. Refer to the "Guidelines for acceleration / deceleration settings" page for the operating conditions. (5) When switching the arm system, the arm will extend in a straight line once. Please be careful of interference with peripheral devices. |
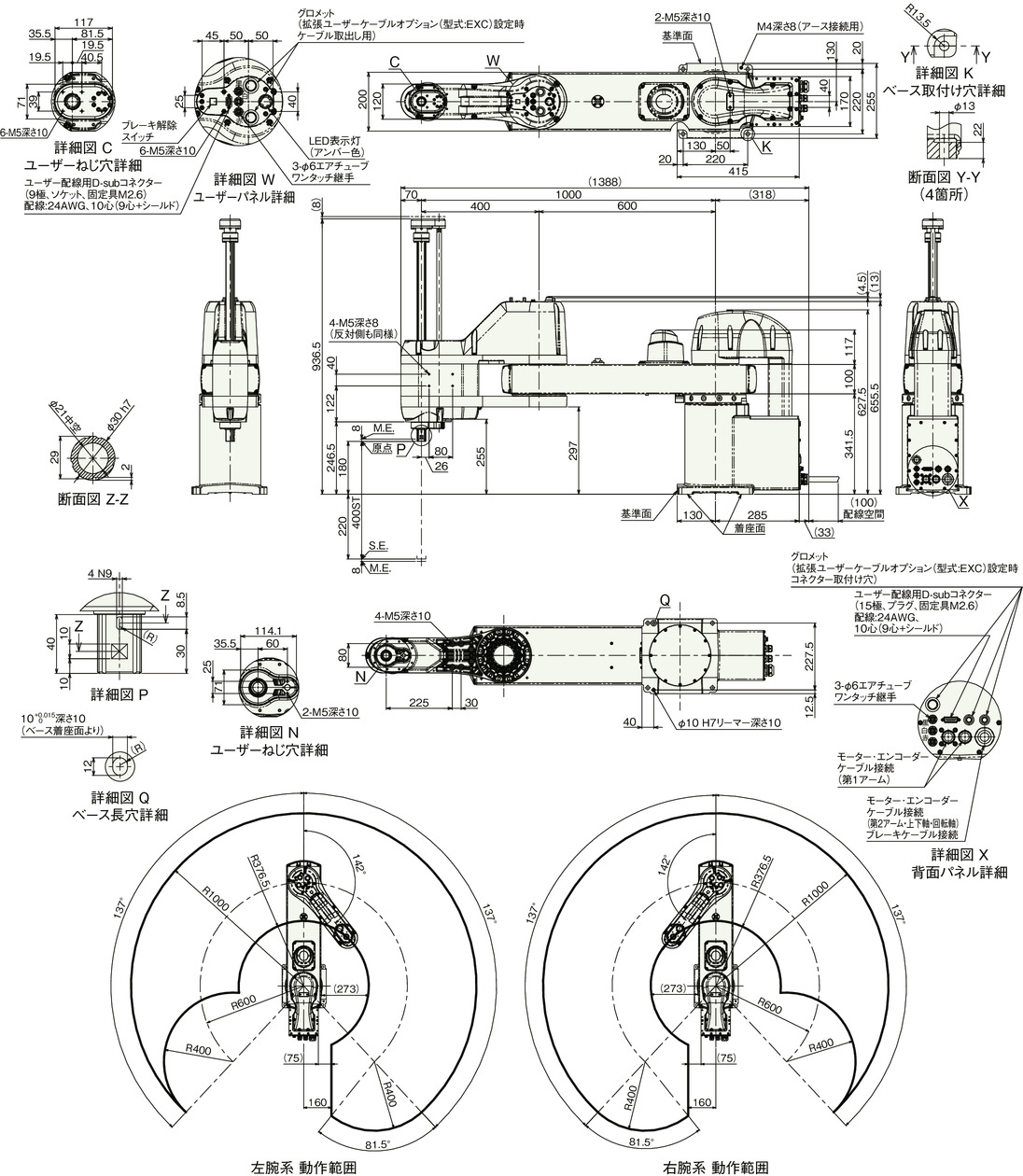
Dimension drawing

IXA-4NHN10040
ST: Stroke
M.E.: Mechanical end
S.E.: Stroke end
(Note) Please refer to page 5-871 (Note 8) for further details on the cable connection.
Mass
| Heading | Contents |
|---|---|
| Mass | 80.0kg |
Cycle time
| Heading | Time |
|---|---|
| Standard Cycle Time | 0.56 sec |
| Continuous cycle time | 0.69 sec |
The standard / continuous cycle time indicates the time required when operating with the fastest round-trip operation setting under the following conditions.
Payload of 2kg, vertical movement 25mm, horizontal movement 300mm (coarse positioning arch motion)
[Standard cycle time]
The time required for the fastest operation. Generally, this is a guide for high-speed performance.
Please note that continuous operation at the fastest operation is not possible.
[Continuous cycle time]
The cycle time for continuous operation.

Tip shaft allowable moment of inertia
| Number of axes | Tip shaft allowable moment of inertia |
|---|---|
| 4-axis type | 0.5 kg・m2 |
This is the allowable moment of inertia calculated from the tip axis (rotation axis) of the SCARA robot.
The offset from the center of the tip axis to the center of gravity of the tool should be within the following values.
If the center of gravity of the tool moves away from the center of the tip axis, it is necessary to reduce the speed and acceleration appropriately. The overhang length is limited depending on the load and operating conditions.
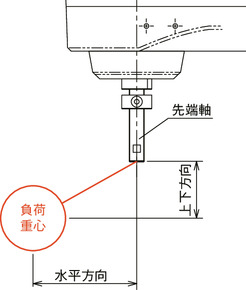
| Horizontal direction | Vertical direction |
|---|---|
| 200mm or less | 150mm or less |
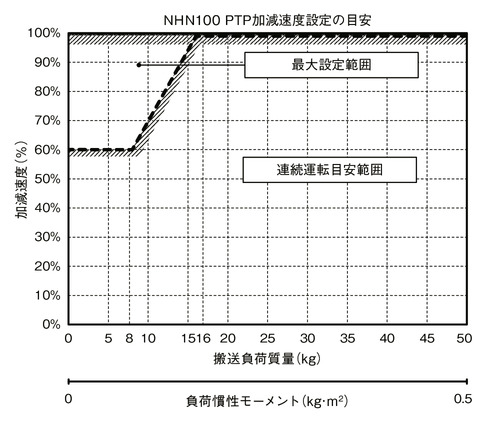
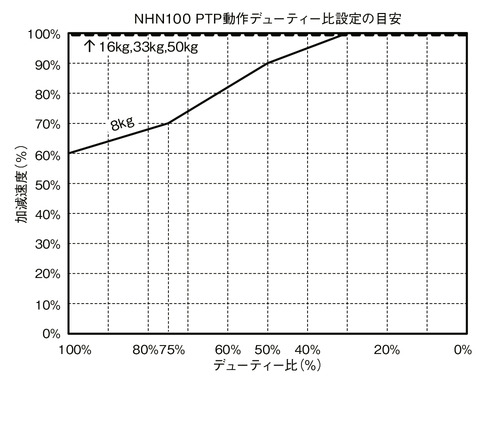
Guideline for acceleration / deceleration setting
SCARA Robot IXA cannot operate continuously at the maximum acceleration / deceleration and maximum speed noted in the catalog. If you plan to operate at maximum acceleration/deceleration, please set a stop time by referring to the continuous operation duty ratio graph. If continuous operation is required, operate with the acceleration / deceleration setting within the continuous operation guideline range described in guideline graph for acceleration / deceleration setting.
(1) In case of PTP operation, be sure to use the WGHT instruction on the program to set the mass and moment of inertia before operating. The maximum acceleration/deceleration that SCARA can operate with each payload is 100%. Please note that the operating time will be different if the transport mass is different even if the acceleration / deceleration and speed settings are the same. The acceleration/deceleration (%) set for PTP operation is adjusted to a value that allows operation at the set value using the optimum speed/acceleration/deceleration function, depending on the transferred load and movement posture. However, the optimal acceleration/deceleration function does not guarantee that it can operate in all motion patterns.
(2) Adjust the acceleration / deceleration by gradually increasing the set value from the continuous operation guideline value.
(3) If an overload error occurs, reduce the acceleration/deceleration as appropriate, or set a stop time using the continuous operation duty ratio as a reference.
(4) Duty ratio (%) = (operating time / (operating time + stop time)) × 100
(5) If you want the robot to move horizontally at high speed, move the vertical axis as close to the rising end as possible.
(6) Keep the moment of inertia and the loaded mass below the allowable values.
(7) The payload indicates the moment of inertia and mass around the rotation axis.
(8) Operate the robot with an appropriate acceleration / deceleration based on the mass and moment of inertia. Failure to comply will result in early life, damage and/or vibration of the drive unit.
(9) If the moment of inertia of the load is large, vibration may occur at the vertical axis depending on its position. If vibration occurs, slow down the acceleration / deceleration as appropriate.
PTP operation
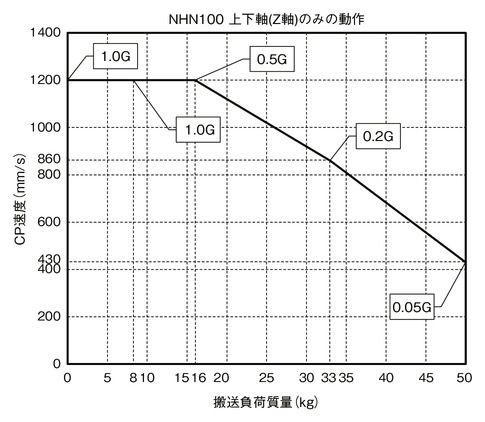
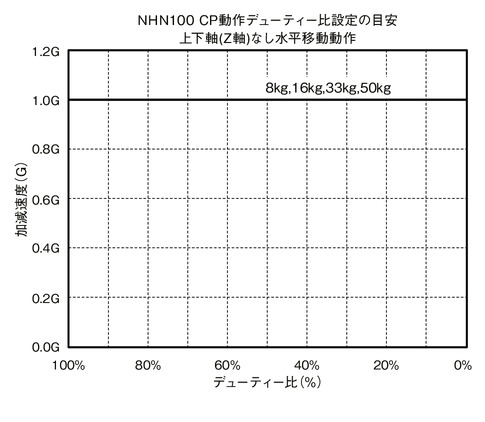
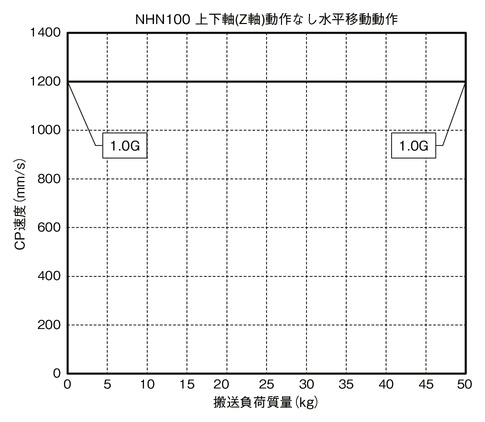
CP operation
Horizontal

Vertical
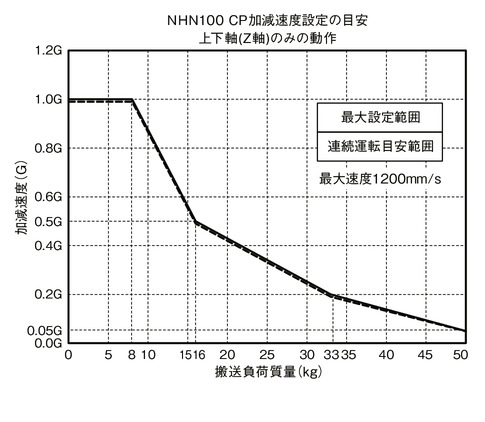
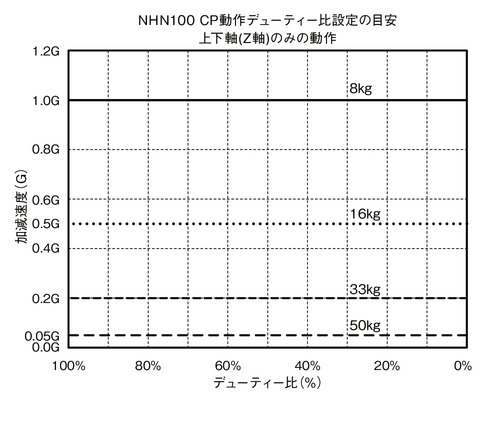
CP operation speed / acceleration / deceleration limit
Horizontal
Vertical