
Product feature

Attachment orientation


Actuator specification
| Model | Motor output (W) | Lead (mm) | Maximum Load Capacity | Rated thrust (N) | Stroke (mm) | |
|---|---|---|---|---|---|---|
| Horizontal (kg) | Vertical (kg) | |||||
| RCA-RGS4D-①-20-12-②-③-④-⑤ | 20 | 12 | 3.0 | 0.5 | 18.9 | 50 - 300 (50mm intervals) |
| RCA-RGS4D-①-20-6-②-③-④-⑤ | 6 | 6.0 | 1.5 | 37.7 | ||
| RCA-RGS4D-①-20-3-②-③-④-⑤ | 3 | 12.0 | 3.5 | 75.4 | ||
| RCA-RGS4D-①-30-12-②-③-④-⑤ | 30 | 12 | 4.0 | 1.0 | 28.3 | |
| RCA-RGS4D-①-30-6-②-③-④-⑤ | 6 | 9.0 | 2.5 | 56.6 | ||
| RCA-RGS4D-①-30-3-②-③-④-⑤ | 3 | 18.0 | 6.0 | 113.1 | ||
Symbol description ① Encoder type ② Stroke ③ Adaptive controller ④ Cable length ⑤ Option
| Stroke lead | 50 - 300 (50mm intervals) |
|---|---|
| 12 | 600 |
| 6 | 300 |
| 3 | 150 |
(Measured in mm/s)
Actuator specification
| Heading | Contents |
|---|---|
| Drive system | Ball screw φ10mm, rolled C10 |
| Accuracy of Repeating Positioning. | ±0.02mm |
| Lost motion | 0.1mm and below |
| Rod diameter | φ20mm |
| Non-rotational accuracy of rod | ±0.05° |
| Ambient operating temperature and humidity | 0 - 40℃, RH 85% and below (no condensation) |
Adaptive controller
The actuators introduced in this page are controllable using the controllers shown below. Please select their type based on intended usage.
| Name | Appearance | Max. connectable axis No. | Power source voltage | Control method | Maximum positioning points | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positioner | Pulse train | Program | Network ※Select | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| ACON-CB/CGB |  | 1 | DC24V | ● ※Selectable | ● ※Selectable | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (768 for network specification) |
| ACON-CYB/PLB/POB |  | 1 | ● ※Selectable | ● ※Selectable | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| ASEL-CS |  | 2 | ● | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 1500 | |
| MCON-C/CG |  | 8 | - | - | - | ● | ● | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | 256 | |
| MCON-LC/LCG |  | 6 | - | - | ● | ● | ● | - | ● | ● | - | - | ● | ● | ● | - | - | 256 | |
| RCON |  | 16 | - | - | - | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 128 | |
(Note) Please refer to page 6 -13 for abbreviated names of network (e.g. DV, CC).
(Note) Absolute actuator can't be connected to RCON.
Oversea specification


Feature

Important notes on selection
| (1) Load capacity assuming an acceleration of 0.3G (0.2G for lead 3), which is its upper limit for acceleration. (2) Available duty depends on the operating condition (e.g.load mass, acceleration/deceleration). Please refer to page 1-448 for further details. (3) Horizontal load capacity shown assumes an use of external guide. Refer page 1-512 for the mass the attached guide can bare singly. (4) Compatible controller for absolute specification are ACON-CB/CGB and ASEL, and simple absolute will be for incremental specification. (5) Safety measures may be required depending on the attachment orientation. Please refer to page 1-379 for further information. (6) Conversion unit or cable is needed to connect RCON. Please refer to page Home for further details. |
Dimension drawing

ST: Stroke
ME: Mechanical end
SE: Stroke end
※1 Connect a motor/encoder cable. Please refer to page 1-293 for the further details about the cable.
*2 The rod moves to the ME upon returning to origin, so please take precaution that it may not interfere with anything during the process.
(Note) RCA-RGS4D type has no brake setting.
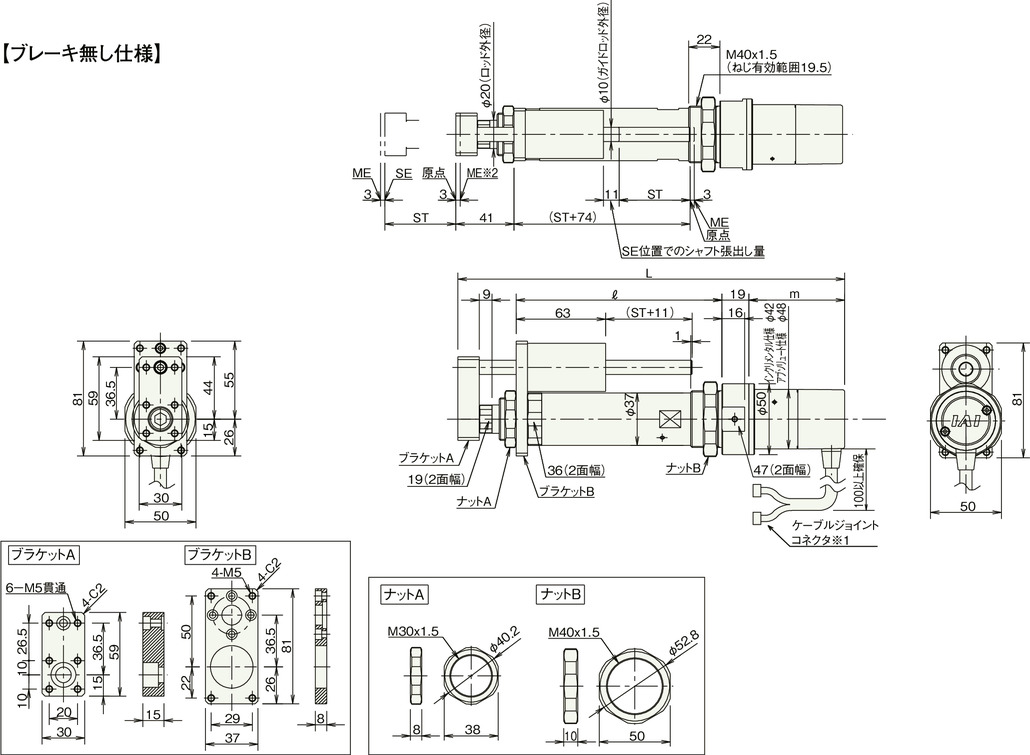
RCA-RGS4D (without brake)
| Stroke | 50 | 100 | 150 | 200 | 250 | 300 | ||
|---|---|---|---|---|---|---|---|---|
| L | 20W | Incremental | 250.5 | 300.5 | 350.5 | 400.5 | 450.5 | 500.5 |
| Absolute | 263.5 | 313.5 | 363.5 | 413.5 | 463.5 | 513.5 | ||
| 30W | Incremental | 265.5 | 315.5 | 365.5 | 415.5 | 465.5 | 515.5 | |
| Absolute | 278.5 | 328.5 | 378.5 | 428.5 | 478.5 | 528.5 | ||
| ℓ | 145 | 195 | 245 | 295 | 345 | 395 | ||
| m | 20W | Incremental | 45.5 | |||||
| Absolute | 58.5 | |||||||
| 30W | Incremental | 60.5 | ||||||
| Absolute | 73.5 | |||||||
| Mass (kg) | 1.3 | 1.5 | 1.7 | 1.9 | 2.1 | 2.3 | ||