
Product feature


Attachment orientation



(Note) Please note that the bellows shape in the photo above has been partially changed.
Actuator specification
| Model | Motor output (W) | Lead (mm) | Maximum Load Capacity | Rated thrust (N) | Stroke (mm) | |
|---|---|---|---|---|---|---|
| Horizontal (kg) | Vertical (kg) | |||||
| RCAW-①-I-20-10-②-③-④-⑤ | 20 | 10 | 4 | 1.5 | 36.2 | 50 - 200 (Every 50mm) |
| RCAW-①-I-20-5-②-③-④-⑤ | 5 | 9 | 3 | 72.4 | ||
| RCAW-①-I-20-2.5-②-③-④-⑤ | 2.5 | 18 | 6.5 | 144.8 | ||
Symbol description ① Type ② Stroke ③ Compatible controller ④ Cable length ⑤ Options
| Stroke lead | 50 - 200 (Every 50mm) |
|---|---|
| 10 | 500 |
| 5 | 250 |
| 2.5 | 125 |
(Measured in mm/s)
Actuator specification
| Heading | Contents |
|---|---|
| Drive system | Ball screw φ8mm, rolled C10 |
| Accuracy of Repeating Positioning. | ±0.02mm |
| Lost motion | 0.1mm or less |
| Rod diameter | φ16mm |
| Non-rotational accuracy of rod | ±1.0 degree |
| Protective structure | IP54 |
| Ambient operating temperature and humidity | 0 - 40℃, 85% RH and below (Non-condensing) |
Adaptive controller
The actuators introduced in this page are controllable using the controllers shown below. Please select their type based on intended usage.
| Name | Appearance | Max. connectable axis No. | Power source voltage | Control method | Maximum positioning points | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positioner | Pulse train | Program | Network *Select | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| ACON-CB/CGB |  | 1 | DC24V | ● *Selectable | ● *Selectable | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (768 for network specification) |
| ACON-CYB/PLB/POB |  | 1 | ● *Selectable | ● *Selectable | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| ASEL-CS |  | 2 | ● | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 1500 | |
| MCON-C/CG |  | 8 | - | - | - | ● | ● | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | 256 | |
| MCON-LC/LCG |  | 6 | - | - | ● | ● | ● | - | ● | ● | - | - | ● | ● | ● | - | - | 256 | |
| RCON |  | 16 | - | - | - | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 128 | |
(Note) Refer to page 7-17 for network abbreviation symbols such as DV and CC.
Oversea specification


Feature

Important notes on selection
| (1) Load capacity shown assumes an operation in acceleration of 0.3G (0.2G for lead 2.5). The above value is the upper limit for acceleration. (2) Available duty depends on the operating condition (e.g.load mass, acceleration/deceleration). Refer to page 1-288 for further details. (3) Horizontal payload is the value when an external guide is used and no external force is applied to the rod from any direction other than the direction of movement. (4) The cable joint connector is not drip-proof. Please install it in a place where it will not be exposed to water. (5) Encoder type box for model item will be "I" for simple absolute as well. (6) Precaution is required depending on the attachment orientation. Refer to page 1-199 for further details. (7) A conversion unit, or a conversion cable is required to connect with RCON. Refer to page 7-25 for further details. |
Dimension drawing

ST: Stroke
ME: Mechanical end
SE: Stroke end
*1 Connect the motor cable and encoder cable here. Refer to page 1-103 for details of the cable.
*2 The intake and exhaust ports are piping for air release inside the bellows. Insert a tube with an outer diameter of φ10 mm and extend it to a place where it will not be exposed to water.
(Note) When returning to the home position, the slider moves to ME. Please be careful of interference with surrounding objects.
(Note) Do not apply any external force on to the rod except towards the direction of its movement. Detent mechanism may get damaged if a force was applied to the rod from its right angle, or towards its rotating direction.
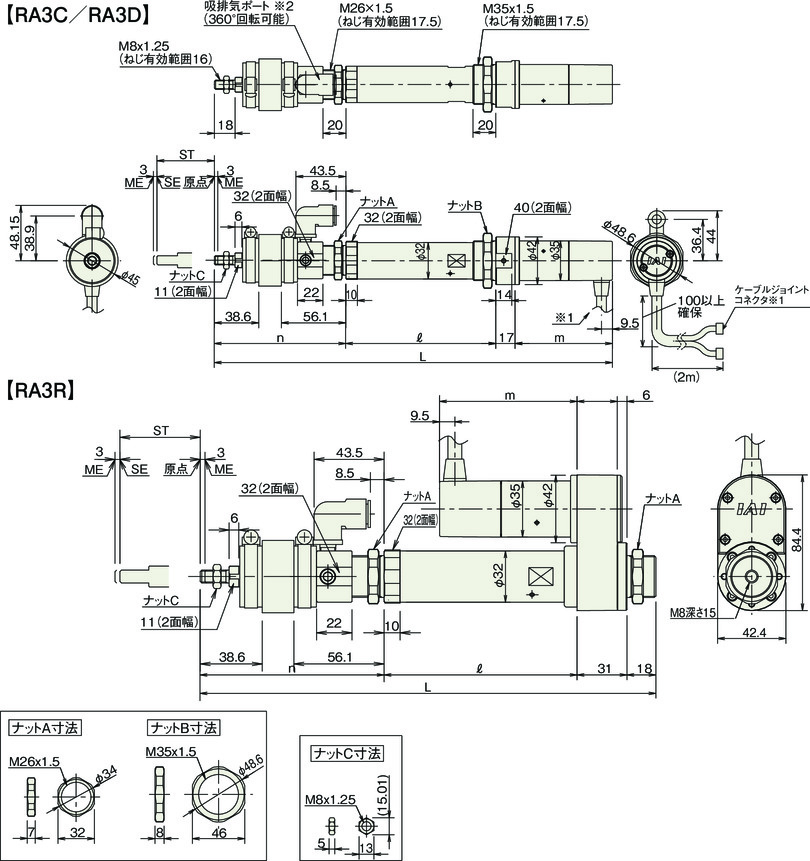
RCAW-RA3C/RA3D/RA3R (w/o brake)
| Stroke | 50 | 100 | 150 | 200 | |
|---|---|---|---|---|---|
| L | RA3C | 348.9 | 408.9 | 468.9 | 528.9 |
| RA3D | 329.9 | 389.9 | 449.9 | 509.9 | |
| RA3R | 283.4 | 343.4 | 403.4 | 463.4 | |
| ℓ | RA3C | 132 | 182 | 232 | 282 |
| RA3D | 132 | 182 | 232 | 282 | |
| RA3R | 120 | 170 | 220 | 270 | |
| m | RA3C | 85.5 | |||
| RA3D | 66.5 | ||||
| RA3R | 85.5 | ||||
| n | RA3C | 114.4 | 124.4 | 134.4 | 144.4 |
| RA3D | 114.4 | 124.4 | 134.4 | 144.4 | |
| RA3R | 114.4 | 124.4 | 134.4 | 144.4 | |
| Mass (kg) | RA3C | 1.0 | 1.1 | 1.2 | 1.3 |
| RA3D | 1.0 | 1.1 | 1.2 | 1.3 | |
| RA3R | 1.1 | 1.2 | 1.3 | 1.4 | |
RCAW-RA3C/RA3D/RA3R (with brake)
| Stroke | 50 | 100 | 150 | 200 | |
|---|---|---|---|---|---|
| L | RA3C | 387.9 | 447.9 | 507.9 | 567.9 |
| RA3D | Does not have brakes. | ||||
| RA3R | 283.4 | 343.4 | 403.4 | 463.4 | |
| ℓ | RA3C | 132 | 182 | 232 | 282 |
| RA3D | Does not have brakes. | ||||
| RA3R | 120 | 170 | 220 | 270 | |
| m | RA3C | 124.5 | |||
| RA3D | Does not have brakes. | ||||
| RA3R | 124.5 | ||||
| n | RA3C | 114.4 | 124.4 | 134.4 | 144.4 |
| RA3D | Does not have brakes. | ||||
| RA3R | 114.4 | 124.4 | 134.4 | 144.4 | |
| Mass (kg) | RA3C | 1.2 | 1.3 | 1.4 | 1.5 |
| RA3D | 1.2 | 1.3 | 1.4 | 1.5 | |
| RA3R | 1.3 | 1.4 | 1.5 | 1.6 | |