
Product feature




Attachment orientation



Main specification
| Heading | Contents | ||
|---|---|---|---|
| Speed reduction | 1/1 | 1/2 | |
| Lead | Ball screw lead (mm) | Equivalent to 2.27 | Equivalent to 1.05 |
| Gripping Motion | Max. Gripping Force (N)(Both sides) | 20 | 40 |
| Max. Gripping Speed (mm/s)(Per side) | 5 | 5 | |
| Approaching Motion | Max. Speed (mm/s)(Per side) | 75 | 34 |
| Min. Speed (mm/s)(Per side) | 5 | 5 | |
| Rated Acceleration/Deceleration (G)(Per side) | 0.3 | 0.3 | |
| Max. Acceleration/Deceleration (G)(Per side) | 0.3 | 0.3 | |
| Brake | Brake specification | - | |
| Brake retention force (kgf) | - | - | |
| Stroke (Per side) | Min. Stroke (mm)(Per side) | 20 | 20 |
| Max. Stroke (mm)(Per side) | 75 | 75 | |
| Heading | Contents |
|---|---|
| Drive system | Timing belt + Worm rack gear |
| Accuracy of Repeating Positioning. | ±0.01mm |
| Homing precision | - |
| Backlash | 0.2mm or less per side |
| Lost motion | - |
| Linear guide | Infinite linear circulation type |
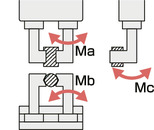
| Allowable static moment value | Ma:2.93N・m |
| Mb:2.93N・m | |
| Mc:5N・m | |
| Dynamic allowable moment | - |
| - | |
| - | |
| Allowable thrust load (Vertical payload) | - |
| Ambient operating temperature and humidity | 0 - 40℃, RH 85% and below (no condensation) |
| Protection grade | - |
| Vibration resistant/Shock resistant | 4.9m/s2 |
| Compatible to overseas standards | CE mark, RoHS compliant |
| Motor type | Pulse motor |
| Encoder type | Incremental |
| Encoder pulse No. | 800 pulse/rev |
| Delivery | Written in [Reference for delivery] section of the homepage |
Direction of the Moment for Slider Type
Checking the Gripping Point Distance
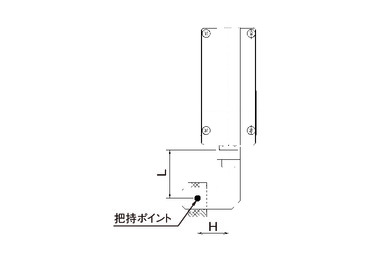
When using, make sure that the distance (L, H) from the finger (claw) mounting surface to the gripping point is within the range of the graph.
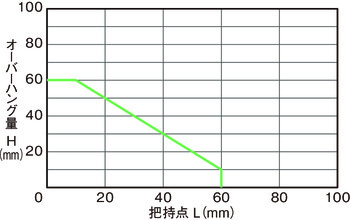
(Note) If the limit range is exceeded, an excessive moment will be applied to the finger sliding part and the internal mechanism, which may adversely affect the service life.
Gripping Force
■Correlation Diagram of Gripping Force and Current Limit Value

(Note) The gripping force is the total value of both fingers when the gripping point distance (L, H) is 0.
(Note) Values indicated are for reference only. There is a maximum variation of about ± 15%.
(Note) The speed is fixed at 5mm/s for gripping (pushing) motion.
■Reference for Gripping Point Distance and Gripping Force
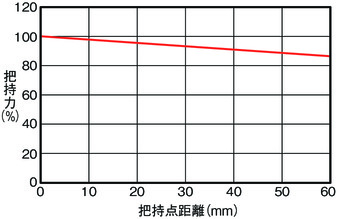
Standard type
(Note) Indicates the gripping force based on the gripping point distance when the maximum gripping force is 100%.
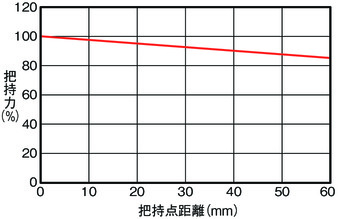
High speed type
Adaptive controller
The actuators introduced in this page are controllable using the controllers shown below. Please select their type based on intended usage.
| Name | Appearance | Max. connectable axis No. | Power source voltage | Control method | Maximum positioning points | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positioner | Pulse train | Program | Network *Select | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MCON-C/CG |  | 8 | DC24V | - | - | - | ● | ● | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | 256 |
| MSEL-PC/PG |  | 4 | Single phase AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● *Selectable | ● *Selectable | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (768 for network specification) |
| PCON-CYB/PLB/POB |  | 1 | ● *Selectable | ● *Selectable | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 | - | - | - | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 128 | |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(Note) Refer to page 7-17 for network abbreviations such as DV and CC.
Oversea specification


Important notes on selection
| (1) The maximum opening/closing speed of the "Main specification" indicates the operating speed of one side. The relative operating speed is twice this value. (2) The maximum gripping force of the "Main specification" is the total value of the gripping force of both fingers when the gripping point distance and the overhang distance is 0. For the mass of the work that can be actually transported, refer to "Checking the Gripping Point Distance". (3) Be sure to use push-motion operation to grip the work. Refer to page 1-311 for further details. (4) Encoder type box for model item will be "I" for simple absolute as well. (5) Safety measures may be required depending on the attachment orientation. Refer to page 1-199 for further details. |
Dimension drawing

ST: Opening/Closing Stroke
※1 The actuator cable is a robot cable.
※2 Motor/encoder cable is to be connected to the cable joint connector.
(Note) Home position of the slider is at the open side.
(Note) The current position is the home position of the slider.
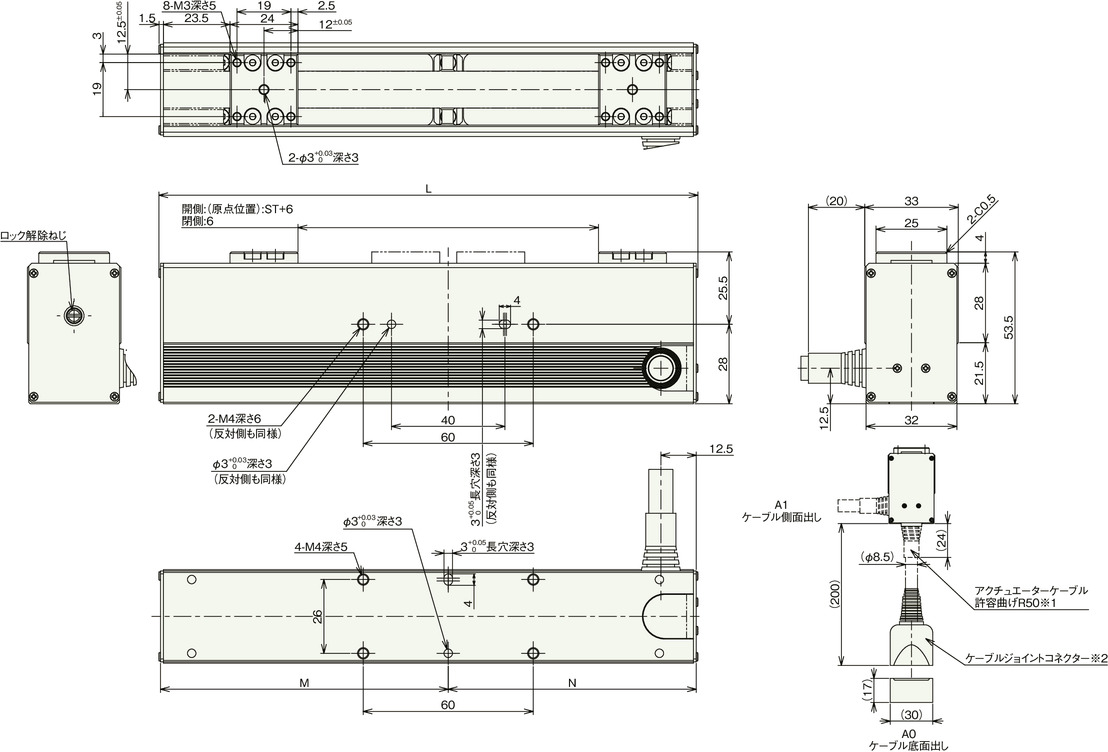
Dimension by stroke length
| Stroke | 40 | 60 | 80 | 100 | 120 | 150 |
|---|---|---|---|---|---|---|
| L | 130 | 150 | 170 | 190 | 210 | 240 |
| M | 71.5 | 81.5 | 91.5 | 101.5 | 111.5 | 126.5 |
| N | 57.5 | 67.5 | 77.5 | 87.5 | 97.5 | 112.5 |
Mass by stroke length
| Stroke | 40 | 60 | 80 | 100 | 120 | 150 |
|---|---|---|---|---|---|---|
| Mass (kg) | 0.51 | 0.56 | 0.61 | 0.66 | 0.71 | 0.78 |