
Product feature



Attachment orientation



Actuator specification
| Model | Lead (mm) | Connecting controller | Maximum Load Capacity | Maximum pressing force (N) | Repetitive positioning accuracy (mm) | Stroke (mm) | ||
|---|---|---|---|---|---|---|---|---|
| Horizontal (kg) | Vertical (kg) | |||||||
| Standard specification | RCP4W-RA7C-I-56P-16-①-P3-②-③ | 16 | High Output Enabled | 40 | 7 | 219 | ±0.02 | 50 - 500 (Every 50mm) |
| High Output Disabled | 5 | |||||||
| RCP4W-RA7C-I-56P-8-①-P3-②-③ | 8 | High Output Enabled | 50 | 15 | 437 | |||
| High Output Disabled | ||||||||
| RCP4W-RA7C-I-56P-4-①-P3-②-③ | 4 | High Output Enabled | 70 | 25 | 875 | |||
| High Output Disabled | ||||||||
| High thrust specification | RCP4W-RA7C-I-56SP-4-①-P4-②-③ | 4 | High Output Enabled | - | 45 | 1030 | ||
| High Output Disabled | ||||||||
Code explanation ① Stroke ② Cable length ③ Option
| Stroke lead | Connecting controller | 50 (mm) | 100 - 500 (Every 50mm) |
|---|---|---|---|
| 16 | High Output Enabled | 500 【450<300>】 | 560<400>【450<300>】 |
| High Output Disabled | 420<350> | ||
| 8 | High Output Enabled | 340<280>【300<250>】 | |
| High Output Disabled | 210 | ||
| 4 | High Output Enabled | 170<140>【150<125>】 | |
| High Output Disabled | 140<110> | ||
| 4 (high thrust) | High Output Enabled | <80>【<80>】 | |
| High Output Disabled | |||
(Measured in mm/s)
(Note) Values in < > are values when used vertically.
(Note) The values in 【 】 are the values when the high output setting is enabled and the product is used at an environmental temperature of 5℃ or less.
Correlation diagram of speed and load capacity
Due to the characteristics of a pulse motor, the RCP4 series' payload capacity decreases as the speed increases.
Search for desired speed and load capacity from the table below.
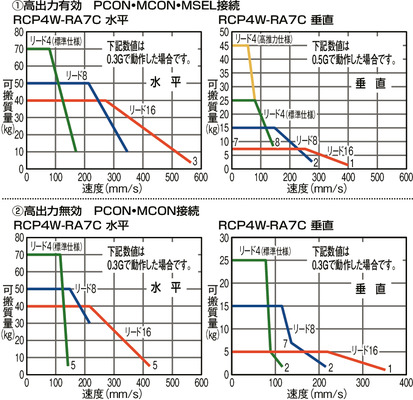
(Note) Please refer the instruction manual if the environmental temperature is below 5℃.
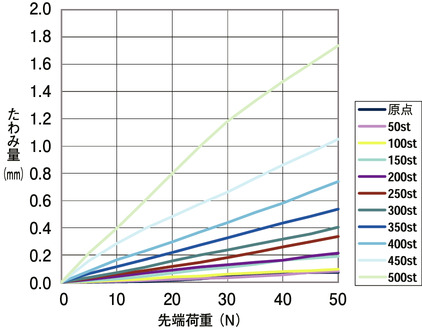
RCP4W-RA7C Rod deflection amount (reference value)
Diagram below shows the flexible volume of a rod when a force is applied to it from its side upon setting the actuator in vertical posture.
Actuator specification
| Heading | Contents |
|---|---|
| Drive system | Ball screw φ12mm, rolled C10 |
| Accuracy of Repeating Positioning. | ±0.02mm |
| Lost motion | 0.1mm or less |
| Rod | φ25 stainless steel pipe |
| Non-rotational accuracy of rod | 0 degree |
| Allowable load / torque at the rod tip | Refer to the dimension table by stroke, and General Catalogue 2017, page 1-477. |
| Rod tip load offset distance | 100mm or less |
| Protective structure | IP67 |
| Ambient operating temperature and humidity | 0 - 40℃, 85%RH or less (no condensation) |
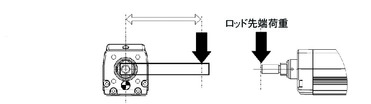
Rod tip offset distance (100mm or less)
Adaptive controller
The actuators introduced in this page are controllable using the controllers shown below. Please select their type based on intended usage.
| Name | Appearance | Max. connectable axis No. | Power source voltage | Control method | Maximum positioning points | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positioner | Pulse train | Program | Network *Select | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MCON-C/CG |  | 8 | DC24V | - | - | - | ● | ● | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | 256 |
| MCON-LC/LCG |  | 6 | - | - | ● | ● | ● | - | ● | ● | - | - | ● | ● | ● | - | - | 256 | |
| MSEL-PC/PG |  | 4 | Single phase AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| MSEL-PCF/PGF |  | 4 | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 | |
| PCON-CB/CGB |  | 1 | DC24V | ● *Selectable | ● *Selectable | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (768 for network specification) |
| PCON-CFB/CGFB (56SP motor compatible type) |  | 1 | ● *Selectable | ● *Selectable | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (768 for network specification) | |
| PCON-CYB/PLB/POB |  | 1 | ● *Selectable | ● *Selectable | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 | - | - | - | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 128 | |
(Note) Refer to page 7-17 for network abbreviation symbols such as DV and CC.
(Note) If you select the 56SP motor for the actuator, it will only be compatible with PCON-CFB/CGFB and MSEL-PCF/PGF.
(Note) The high output function can be enabled for MCON only if the "high output setting specification" is specified by the option. The maximum number of connectable axes when high output is enabled is C: 4, LC: 3.
(Note) The product can't be connected to the 3rd and 4th axis of MSEL-PCF/PGF.
Oversea specification


Feature

Important notes on selection
| (1) The payload is the value when operating at an acceleration of 0.3G horizontally and 0.5G vertically. If the acceleration is increased, the payload will decrease. (2) Horizontal payload is the value when an external guide is used. (3) High thrust specifications are exclusive for vertical operation only. Brake is included as standard. (4) Among the applicable controllers, PCON-CFB/CGFB and MSEL-PCF/PGF are exclusively for high thrust specifications. (5) Encoder type box for model item will be "I" for simple absolute as well. (6) Precaution is required depending on the attachment orientation. Refer page 1-199 for further details. (7) Please refer to page 1-387 of the General Catalogue 2017 for the push-motion. (8) A conversion unit, or a conversion cable is required to connect with RCON. Refer to page 7-25 for further details. |
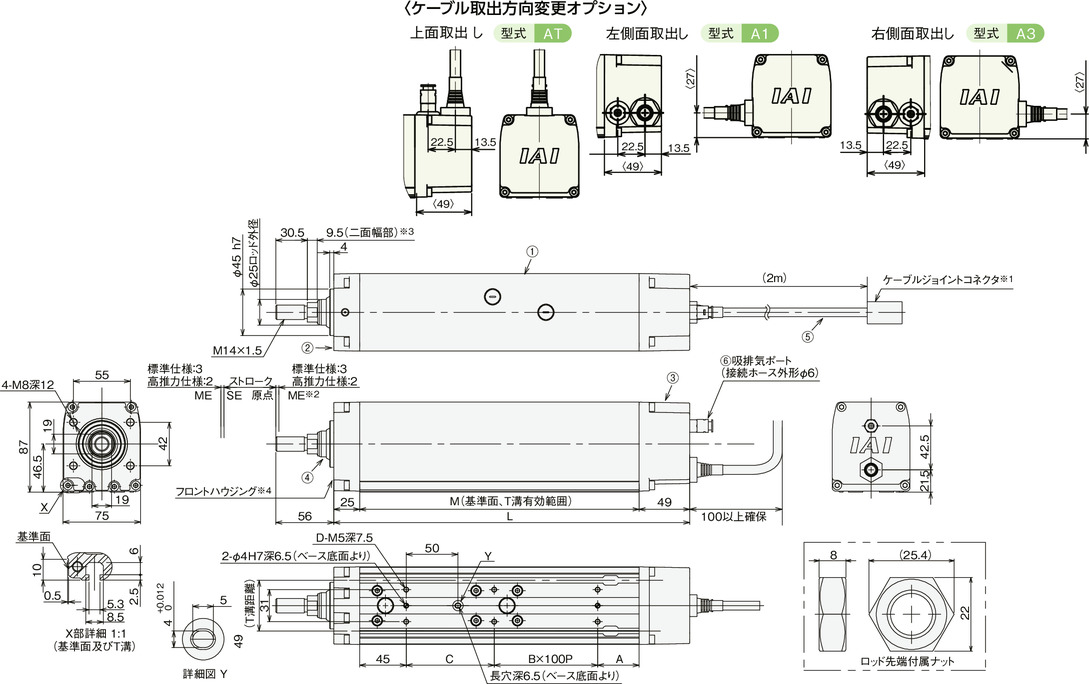
Dimension drawing

ME: Mechanical end
SE: Stroke end
*1 Connect a motor/encoder cable.
*2 When returning to the home position, the rod moves to ME. Please be careful of interference with surrounding objects.
*3 The direction the width between two flats are facing differs by product.
*4 When installing the main body using the front housing and flange, make sure that no external force is applied to the main body.
Main material
| ① | Frame | White alumite treated aluminum extrusion material (A6063SS-T5 equivalent) |
| ② | Front bracket | Aluminum die cast |
| ③ | Rear cover | Aluminum die cast |
| ④ | Rod | Polished finish + Hard chrome plating treated stainless steel pipe (SUS304 equivalent) |
| ⑤ | Actuator cable | Polyvinyl chloride (PVC) |
| ⑥ | Intake/exhaust port | Polyphenylene sulfide (PPS) |
Dimension/Mass by stroke
| Stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | Without brake | 344 | 394 | 444 | 494 | 544 | 594 | 644 | 694 | 744 | 794 | |
| With brake (Note 2) | 399 | 449 | 499 | 549 | 599 | 649 | 699 | 749 | 799 | 849 | ||
| A | Without brake | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | |
| With brake (Note 2) | 95 | 95 | 95 | 95 | 95 | 95 | 95 | 95 | 95 | 95 | ||
| B | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 5 | 5 | ||
| C | 85 | 135 | 85 | 135 | 85 | 135 | 85 | 135 | 85 | 135 | ||
| D | 6 | 6 | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | ||
| M | Without brake | 270 | 320 | 370 | 420 | 470 | 520 | 570 | 620 | 670 | 720 | |
| With brake | 325 | 375 | 425 | 475 | 525 | 575 | 625 | 675 | 725 | 775 | ||
| Allowable static load at the rod tip (N) | 112.7 | 91.5 | 76.7 | 65.7 | 57.2 | 50.4 | 44.8 | 40.2 | 36.2 | 32.7 | ||
| Allowable dynamic load on the rod tip (N) | Load offset 0mm | 49.0 | 37.4 | 29.9 | 24.5 | 20.4 | 17.1 | 14.5 | 12.3 | 10.3 | 8.6 | |
| Load offset 100mm | 38.7 | 31.0 | 25.5 | 21.4 | 18.1 | 15.4 | 13.2 | 11.2 | 9.5 | 8.0 | ||
| Allowable static torque at the rod tip (Nm) | 11.4 | 9.3 | 7.9 | 6.8 | 6.0 | 5.4 | 4.9 | 4.5 | 4.1 | 3.8 | ||
| Allowable dynamic torque at the rod tip (N・m) | 3.9 | 3.1 | 2.5 | 2.1 | 1.8 | 1.5 | 1.3 | 1.1 | 1.0 | 0.8 | ||
| Mass (kg) | Without brake | 5.6 | 6.1 | 6.6 | 7.2 | 7.7 | 8.2 | 8.7 | 9.2 | 9.7 | 10.2 | |
| With brake | 6.4 | 6.9 | 7.4 | 7.9 | 8.4 | 9.0 | 9.5 | 10.0 | 10.5 | 11.0 | ||
(Note 2) The dimensions of the high thrust specification are those with a brake.