
Product feature



Attachment orientation


(Note) Photo above shows the motor reversing specification (Motor reversing on the left)(ML).
Main specification
| Heading | Contents | |||||
|---|---|---|---|---|---|---|
| Lead | Ball screw lead (mm) | 20 | 12 | 6 | 3 | |
| Horizontal | Load capacity | Maximum load capacity (kg) (High-power enabled) | 15 | 28 | 42 | 42 |
| Maximum load capacity (kg) (High-power disabled) | 8 | 14 | 20 | 25 | ||
| Speed/ Acceleration/Deceleration | Maximum speed (mm/s) | 1120 | 800 | 400 | 200 | |
| Minimum speed (mm/s) | 25 | 15 | 8 | 4 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.1 | 0.1 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 1 | 1 | 1 | 1 | ||
| Vertical | Load capacity | Maximum load capacity (kg) (High-power enabled) | 1 | 2.5 | 6 | 16 |
| Maximum load capacity (kg) (High-power disabled) | 0.75 | 2 | 5 | 10 | ||
| Speed/ Acceleration/Deceleration | Maximum speed (mm/s) | 960 | 700 | 400 | 200 | |
| Minimum speed (mm/s) | 25 | 15 | 8 | 4 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.3 | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 0.5 | 0.5 | 0.5 | 0.5 | ||
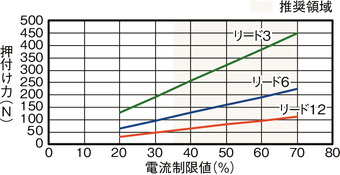
| Pressing motion | Max. pressing thrust (N) | 67 | 112 | 224 | 449 | |
| Max. pressing speed (mm/s) | 30 | 30 | 20 | 20 | ||
| Brake | Brake specification | Non-excitation electromagnetic brake | ||||
| Brake retention force (kgf) | 1 | 2.5 | 6 | 16 | ||
| Stroke | Minimum stroke (mm) | 50 | 50 | 50 | 50 | |
| Maximum stroke (mm) | 800 | 800 | 800 | 800 | ||
| Stroke pitch (mm) | 50 | 50 | 50 | 50 | ||
| Heading | Contents |
|---|---|
| Drive system | Ball screw φ10mm, rolled C10 |
| Accuracy of Repeating Positioning. | ±0.01mm |
| Lost motion | 0.1mm or less |
| Base | Material: White alumite treated aluminum |
| Linear guide | Infinite linear circulation type |
| Allowable static moment value | Ma : 65 N・m |
| Mb : 75 N・m | |
| Mc : 120 N・m | |
| Dynamic allowable moment (Note 3) | Ma : 33.7 N・m |
| Mb : 40.2 N・m | |
| Mc : 55.3 N・m | |
| Ambient operating temperature and humidity | 0 - 40℃, RH 85% and below (no condensation) |
| Protection grade | IP20 |
| Vibration resistant/Shock resistant | 4.9m/s2 |
| Compatible to overseas standards | CE mark, RoHS compliant |
| Motor type | Pulse motor |
| Encoder type | Battery-less absolute |
| Encoder pulse No. | 8192 pulse/rev |
| Delivery | Written in [Reference for delivery] section of the homepage |
(Note 3) Based on standard rated life of 5,000km. Life time travelling distance differs based on operating condition and attached condition. Refer page 1-276 for the operating life.
Slider type moment direction

Stroke and maximum speed
(Measured in mm/s)
| Lead (mm) | Connecting controller | 50 - 450 (per 50mm) | 500 (mm) | 550 (mm) | 600 (mm) | 650 (mm) | 700 (mm) | 750 (mm) | 800 (mm) |
|---|---|---|---|---|---|---|---|---|---|
| 20 | High Output Enabled | 1120 <960> | 1090<960> | 940 | 815 | 715 | 630 | 560 | |
| High Output Disabled | 800<640> | 715<640> | 630 | 560 | |||||
| 12 | High Output Enabled | 800<700> | 700 | 585 | 515 | 445 | 390 | 345 | 315 |
| High Output Disabled | 560 | 515 | 445 | 390 | 345 | 315 | |||
| 6 | High Output Enabled | 400 | 350 | 295 | 255 | 220 | 190 | 170 | 140 |
| High Output Disabled | 340<280> | 295<280> | 255 | 220 | 190 | 170 | 140 | ||
| 3 | High Output Enabled | 200 | 170 | 145 | 125 | 110 | 95 | 85 | 70 |
| High Output Disabled | 140 | 125 | 110 | 95 | 85 | 70 | |||
(Note) < > is applicable when operated vertically.
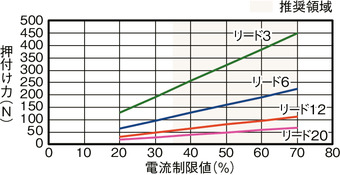
Correlation diagram of pressing force and current limiting value
Load capacity by speed and acceleration table ※High output setting is enabled at the time of shipment. Refer to page 1-23 for further details.
High output setting enabled (Power mode) The maximum speed varies depending on the payload. The base unit for load capacity is kilogram (kg). Empty column refers to inoperable motion.
| Orientation | Horizontal | Vertical | ||||||
|---|---|---|---|---|---|---|---|---|
| Speed | Acceleration (G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 15 | 15 | 10 | 8 | 7 | 1 | 1 | 1 |
| 160 | 15 | 15 | 10 | 8 | 7 | 1 | 1 | 1 |
| 320 | 12 | 12 | 10 | 8 | 6 | 1 | 1 | 1 |
| 480 | 12 | 12 | 9 | 8 | 6 | 1 | 1 | 1 |
| 640 | 12 | 12 | 6.5 | 5 | 4 | 1 | 1 | 1 |
| 800 | 9.5 | 9.5 | 5 | 3 | 2 | 1 | 1 | 1 |
| 960 | 7 | 3 | 2 | 1 | 0.5 | 0.5 | ||
| 1120 | 5 | 1 | ||||||
| Orientation | Horizontal | Vertical | ||||||
|---|---|---|---|---|---|---|---|---|
| Speed | Acceleration (G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 28 | 26 | 18 | 16 | 14 | 2.5 | 2.5 | 2.5 |
| 80 | 28 | 26 | 18 | 16 | 14 | 2.5 | 2.5 | 2.5 |
| 200 | 28 | 26 | 18 | 16 | 14 | 2.5 | 2.5 | 2.5 |
| 320 | 26 | 26 | 18 | 14 | 12 | 2.5 | 2.5 | 2.5 |
| 440 | 26 | 26 | 13 | 11 | 8 | 2.5 | 2.5 | 2.5 |
| 560 | 17.5 | 17.5 | 9 | 5 | 3 | 2 | 2 | 2 |
| 700 | 9 | 3 | 2 | 1 | 1 | 0.5 | ||
| 800 | 3 | |||||||
| Orientation | Horizontal | Vertical | ||||||
|---|---|---|---|---|---|---|---|---|
| Speed | Acceleration (G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 42 | 38 | 26 | 24 | 20 | 6 | 6 | 6 |
| 40 | 42 | 38 | 26 | 24 | 20 | 6 | 6 | 6 |
| 100 | 40 | 38 | 26 | 24 | 20 | 6 | 6 | 6 |
| 160 | 40 | 38 | 26 | 24 | 20 | 6 | 6 | 6 |
| 220 | 37 | 36 | 26 | 24 | 18 | 6 | 6 | 6 |
| 280 | 32 | 32 | 25 | 17 | 13 | 6 | 6 | 5.5 |
| 340 | 22 | 22 | 11 | 6 | 5 | 4 | 4 | 3 |
| 400 | 12 | 6 | 2 | 2 | ||||
| Orientation | Horizontal | Vertical | ||||||
|---|---|---|---|---|---|---|---|---|
| Speed | Acceleration (G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 42 | 42 | 35 | 35 | 35 | 16 | 16 | 16 |
| 50 | 42 | 42 | 35 | 35 | 35 | 16 | 16 | 16 |
| 80 | 40 | 40 | 35 | 35 | 30 | 16 | 16 | 16 |
| 110 | 40 | 40 | 35 | 35 | 30 | 16 | 16 | 16 |
| 140 | 40 | 40 | 35 | 30 | 15 | 15 | 15 | 12 |
| 170 | 40 | 40 | 20 | 10 | 2 | 6 | 6 | 5 |
| 200 | 10 | 1 | 1 | |||||
High output setting disabled (Energy saving mode) The maximum speed varies depending on the payload. The base unit for load capacity is kilogram (kg). Empty column refers to inoperable motion.
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 8 | 5 | 0.75 |
| 160 | 8 | 5 | 0.75 |
| 320 | 8 | 5 | 0.75 |
| 480 | 8 | 4 | 0.75 |
| 640 | 6 | 3 | 0.75 |
| 800 | 3 | 0.5 | |
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 14 | 10 | 2 |
| 80 | 14 | 10 | 2 |
| 200 | 14 | 10 | 2 |
| 320 | 14 | 10 | 2 |
| 440 | 11 | 5 | 1.5 |
| 560 | 4 | 0.5 | 0.5 |
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 20 | 14 | 5 |
| 40 | 20 | 14 | 5 |
| 100 | 20 | 14 | 5 |
| 160 | 20 | 14 | 5 |
| 220 | 16 | 14 | 4 |
| 280 | 11 | 3 | 1.5 |
| 340 | 1 | ||
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 25 | 22 | 10 |
| 20 | 25 | 22 | 10 |
| 50 | 25 | 22 | 10 |
| 80 | 25 | 22 | 10 |
| 110 | 20 | 14 | 8 |
| 140 | 15 | 4 | 3 |
Adaptive controller
The actuators introduced in this page are controllable using the controllers shown below. Please select their type based on intended usage.
| Name | Appearance | Max. connectable axis No. | Power source voltage | Control method | Maximum positioning points | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Positioner | Pulse train | Program | Network *Select | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MSEL-PC/PG |  | 4 | Single phase AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● *Selectable | ● *Selectable | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (768 for network specification) |
| PCON-CYB/PLB/POB |  | 1 | ● *Selectable | ● *Selectable | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 (ML3,SSN,ECM is 8) | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (Position data unavailable for ML3, SSN and ECM) | |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(Note) For network abbreviations such as DV and CC, please refer to page 8-15.
Oversea specification


Important notes on selection
| (1) Maximum speed drops when the stroke length increase, preventing it from reaching the critical revolution value of the ball screws. Use the "Stroke and Max.speed" to check the maximum speed at the stroke you desire. (2) The load capacity shown in the "Main specification" refers to their maximum value. Please refer to "Load capacity by speed and acceleration table" for further information. (3) Refer "Correlation of pressing force and current limit value" if you may need to operate pressing motion. Pressing force shown are their standard value. Refer page 1- 315 for important points to be taken note of. (4) The duty ratio must be limited according to the ambient temperature of use. Refer to page 1-326 for further details. (5) Requires extra care required depending on the mounting posture. Refer to page 1-307 for further details. (6) The approximate overhang load length is 300mm or less in Ma, Mb, and Mc directions (600mm or less for double slider type). Please refer to page 3-52 for the overhang load length. (7) Please refer to page 1-293 for the order number and precautions for the double slider type. |
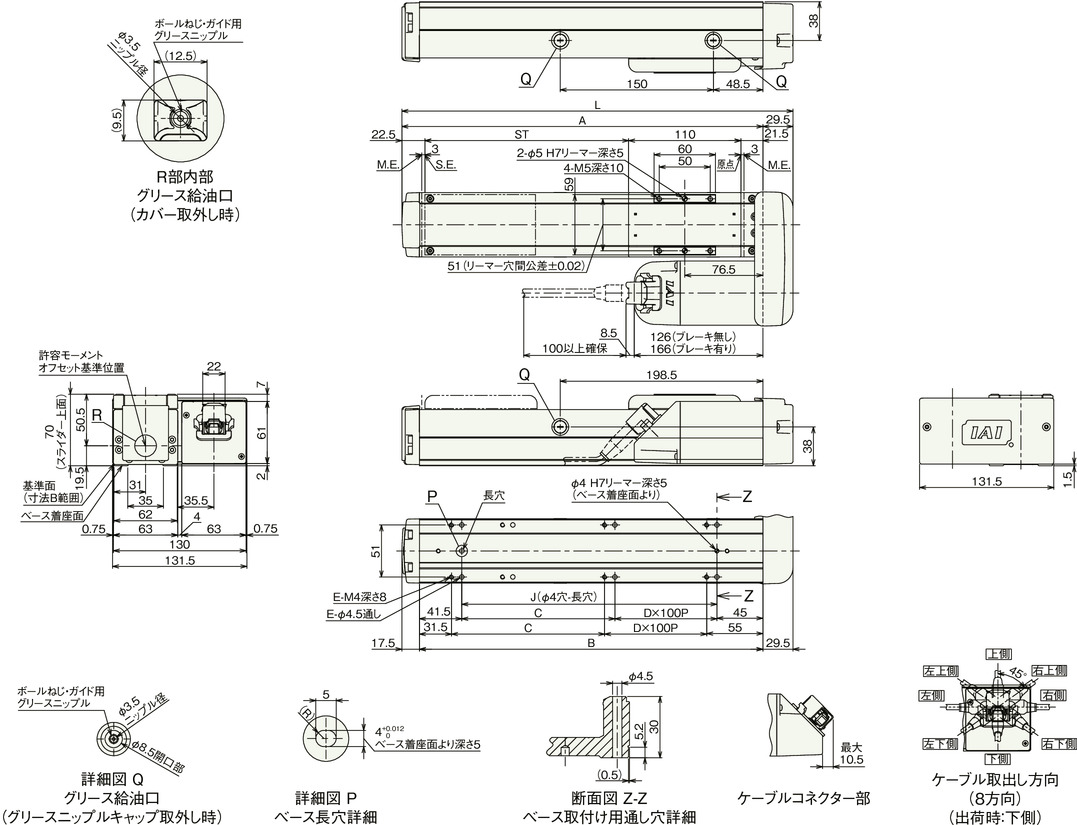
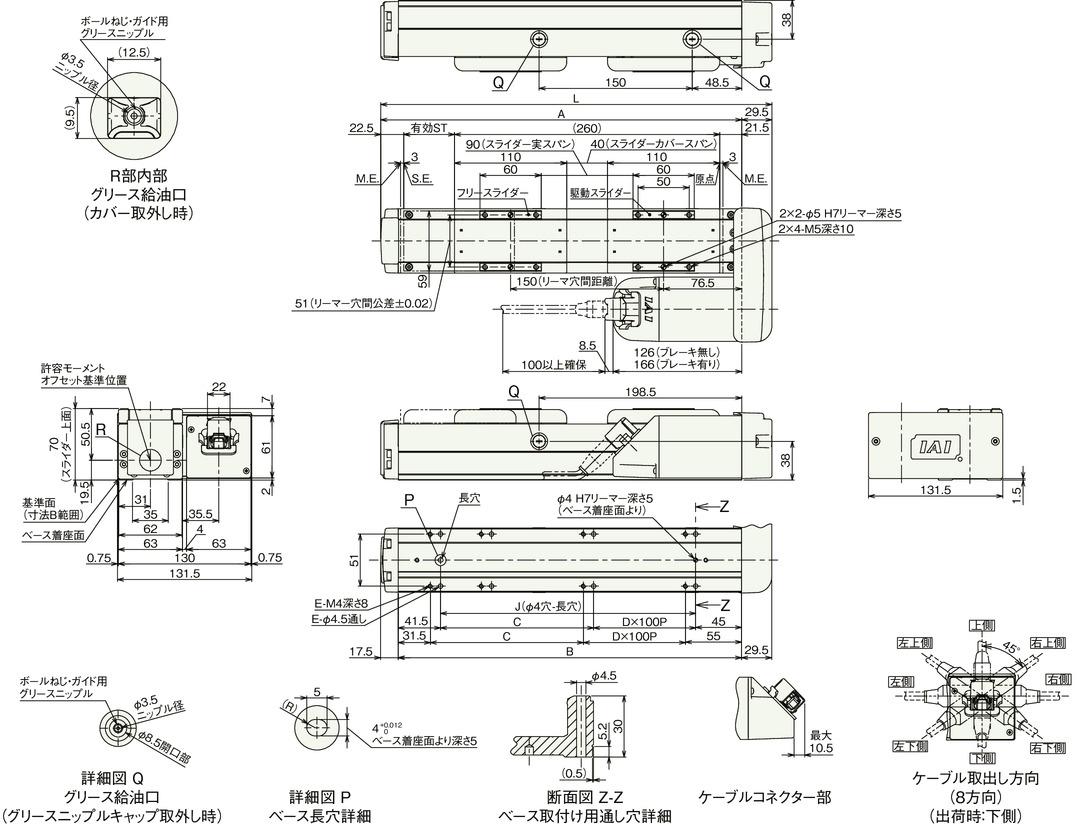
Dimension drawing

ST: Stroke
M.E.: Mechanical end
S.E.: Stroke end
(Note) Please be careful while returning to the home position, for there is a chance of collision while having the slider returning to the M.E. position.
(Note) The figure below shows a motor with left-reversing specification (ML).
(Note) Please refer to page 3-716 for precautions when changing the cable exit direction.
Dimension by stroke length
| Stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | 233.5 | 283.5 | 333.5 | 383.5 | 433.5 | 483.5 | 533.5 | 583.5 | 633.5 | 683.5 | 733.5 | 783.5 | 833.5 | 883.5 | 933.5 | 983.5 |
| A | 204 | 254 | 304 | 354 | 404 | 454 | 504 | 554 | 604 | 654 | 704 | 754 | 804 | 854 | 904 | 954 |
| B | 186.5 | 236.5 | 286.5 | 336.5 | 386.5 | 436.5 | 486.5 | 536.5 | 586.5 | 636.5 | 686.5 | 736.5 | 786.5 | 836.5 | 886.5 | 936.5 |
| C | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 |
| D | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | 7 | 7 | 8 | 8 |
| E | 4 | 6 | 6 | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 |
| J | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 |
Mass by stroke length
| Stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mass (kg) | Without brake | 2.3 | 2.5 | 2.7 | 2.9 | 3.1 | 3.3 | 3.5 | 3.7 | 3.9 | 4.1 | 4.3 | 4.5 | 4.8 | 5.0 | 5.2 | 5.4 |
| With brake | 2.6 | 2.8 | 3.0 | 3.2 | 3.4 | 3.6 | 3.9 | 4.1 | 4.3 | 4.5 | 4.7 | 4.9 | 5.1 | 5.3 | 5.5 | 5.7 | |
Main specification (double slider type)
| Heading | Contents | ||||
|---|---|---|---|---|---|
| Lead | Ball screw lead (mm) | 12 | 6 | 3 | |
| Horizontal | Load capacity | Maximum load capacity (kg) (High-power enabled) | 24 | 30 | 38 |
| Maximum load capacity (kg) (High-power disabled) | 12 | 18 | 23 | ||
| Speed/ Acceleration/Deceleration | Maximum speed (mm/s) | 560 | 340 | 170 | |
| Minimum speed (mm/s) | 15 | 8 | 4 | ||
| Rated acceleration/deceleration (G) | 0.3 | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | 1 | 1 | 1 | ||
| Vertical | Load capacity | Maximum load capacity (kg) (High-power enabled) | - | 4 | 14 |
| Maximum load capacity (kg) (High-power disabled) | - | 3 | 8 | ||
| Speed/ Acceleration/Deceleration | Maximum speed (mm/s) | - | 280 | 170 | |
| Minimum speed (mm/s) | - | 8 | 4 | ||
| Rated acceleration/deceleration (G) | - | 0.3 | 0.3 | ||
| Maximum acceleration/deceleration (G) | - | 0.5 | 0.5 | ||
| Pressing motion | Max. pressing thrust (N) | 112 | 224 | 449 | |
| Max. pressing speed (mm/s) | 20 | 20 | 20 | ||
| Brake | Brake specification | Non-excitation electromagnetic brake | |||
| Brake retention force (kgf) | 2.5 | 6 | 16 | ||
| Stroke | Min. nominal stroke (mm) | 200 | 200 | 200 | |
| Min. effective stroke (mm) | 50 | 50 | 50 | ||
| Max. nominal stroke (mm) | 800 | 800 | 800 | ||
| Max. effective stroke (mm) | 650 | 650 | 650 | ||
| Stroke pitch (mm) | 50 | 50 | 50 | ||
(Note) Nominal stroke: Stroke indicated in the model
Effective stroke: Actual stroke during operation
(Note) Lead 12 can't be installed vertically.
| Heading | Contents |
|---|---|
| Drive system | Ball screw φ10mm, rolled C10 |
| Accuracy of Repeating Positioning. | ±0.01mm |
| Lost motion | 0.1mm or less |
| Base | Material: White alumite treated aluminum |
| Linear guide | Infinite linear circulation type |
| Allowable static moment value | Ma : 546 N・m |
| Mb : 779 N・m | |
| Mc : 205 N・m | |
| Dynamic allowable moment (Note 4) | Ma : 167 N・m |
| Mb : 199 N・m | |
| Mc : 89.8 N・m | |
| Ambient operating temperature and humidity | 0 - 40℃, RH 85% and below (no condensation) |
| Protection grade | IP20 |
| Vibration resistant/Shock resistant | 4.9m/s2 |
| Compatible to overseas standards | CE mark, RoHS compliant |
| Motor type | Pulse motor |
| Encoder type | Battery-less absolute |
| Encoder pulse No. | 8192 pulse/rev |
| Delivery | Written in [Reference for delivery] section of the homepage |
(Note 4) Based on standard rated life of 5,000km. Life time travelling distance differs based on operating condition and attached condition. Refer page 1-276 for the operating life.
Slider type moment direction

Payload table by speed/acceleration (double slider type) ※High output setting is enabled at the time of shipment. Refer to page 1-23 for further details.
High output setting enabled (Power mode) The maximum speed varies depending on the payload. The base unit for load capacity is kilogram (kg). Empty column refers to inoperable motion.
| Orientation | Horizontal | Vertical | ||||
|---|---|---|---|---|---|---|
| Speed | Acceleration (G) | |||||
| (mm/s) | 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 |
| 0 | 24 | 16 | 14 | 12 | ||
| 80 | 24 | 16 | 14 | 12 | ||
| 200 | 24 | 16 | 14 | 12 | ||
| 320 | 24 | 16 | 10 | 8 | ||
| 440 | 18 | 10 | 5 | 3 | ||
| 560 | 7 | 4 | ||||
| Orientation | Horizontal | Vertical | ||||
|---|---|---|---|---|---|---|
| Speed | Acceleration (G) | |||||
| (mm/s) | 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 |
| 0 | 30 | 24 | 22 | 18 | 4 | 4 |
| 40 | 30 | 24 | 22 | 18 | 4 | 4 |
| 100 | 30 | 24 | 22 | 18 | 4 | 4 |
| 160 | 30 | 24 | 22 | 18 | 4 | 4 |
| 220 | 28 | 22 | 18 | 14 | 2 | 2 |
| 280 | 26 | 20 | 3 | 1 | 2 | 1 |
| 340 | 6 | |||||
| Orientation | Horizontal | Vertical | ||||
|---|---|---|---|---|---|---|
| Speed | Acceleration (G) | |||||
| (mm/s) | 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 |
| 0 | 38 | 33 | 33 | 33 | 14 | 14 |
| 50 | 38 | 33 | 33 | 33 | 14 | 14 |
| 80 | 38 | 33 | 33 | 28 | 14 | 14 |
| 110 | 38 | 33 | 33 | 28 | 12 | 12 |
| 140 | 36 | 31 | 28 | 11 | 10 | 8 |
| 170 | 30 | 2 | ||||
High output setting disabled (Energy saving mode) The maximum speed varies depending on the payload. The base unit for load capacity is kilogram (kg). Empty column refers to inoperable motion.
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 12 | 8 | |
| 80 | 12 | 8 | |
| 200 | 12 | 8 | |
| 320 | 12 | 6 | |
| 440 | 7 | 1 | |
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 18 | 12 | 3 |
| 40 | 18 | 12 | 3 |
| 100 | 18 | 12 | 3 |
| 160 | 18 | 12 | 3 |
| 220 | 12 | 10 | 1 |
| 280 | 6 | 2 | |
| Orientation | Horizontal | Vertical | |
|---|---|---|---|
| Speed | Acceleration (G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 23 | 20 | 8 |
| 20 | 23 | 20 | 8 |
| 50 | 23 | 20 | 8 |
| 80 | 23 | 20 | 8 |
| 110 | 18 | 12 | 6 |
| 140 | 10 | 2 | 1 |
Stroke and the maximum speed (double slider type)
(Measured in mm/s)
| Lead (mm) | Call stroke | 200 - 500 | 550 | 600 | 650 | 700 | 750 | 800 |
|---|---|---|---|---|---|---|---|---|
| Effective stroke | 50 - 350 | 400 | 450 | 500 | 550 | 600 | 650 | |
| Connecting controller | (per 50mm) | (mm) | (mm) | (mm) | (mm) | (mm) | (mm) | |
| 12 | High Output Enabled | 560 | 515 | 445 | 390 | 345 | 315 | |
| High Output Disabled | 440 | 390 | 345 | 315 | ||||
| 6 | High Output Enabled | 340<280> | 295<280> | 255 | 220 | 190 | 170 | 140 |
| High Output Disabled | 280<220> | 255<220> | 220 | 190 | 170 | 140 | ||
| 3 | High Output Enabled | 170 | 145 | 125 | 110 | 95 | 85 | 70 |
| High Output Disabled | 140 | 125 | 110 | 95 | 85 | 70 | ||
(Note) < > is applicable when operated vertically.
(Note) Nominal stroke: Stroke indicated for the model
Effective stroke: Actual stroke during operation
Dimension drawing (double slider type)
ST: Stroke
M.E.: Mechanical end
S.E.: Stroke end
Drawing (double slider type)
(Note) Please be careful while returning to the home position, for there is a chance of collision while having the slider returning to the M.E. position.
(Note) The figure below shows a motor with left-reversing specification (ML).
Dimension by stroke length
| Call stroke | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Effective stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 |
| L | 383.5 | 433.5 | 483.5 | 533.5 | 583.5 | 633.5 | 683.5 | 733.5 | 783.5 | 833.5 | 883.5 | 933.5 | 983.5 |
| A | 354 | 404 | 454 | 504 | 554 | 604 | 654 | 704 | 754 | 804 | 854 | 904 | 954 |
| B | 336.5 | 386.5 | 436.5 | 486.5 | 536.5 | 586.5 | 636.5 | 686.5 | 736.5 | 786.5 | 836.5 | 886.5 | 936.5 |
| C | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 | 0 | 50 |
| D | 2 | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | 7 | 7 | 8 | 8 |
| E | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 |
| J | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 |
(Note) Nominal stroke: Stroke indicated for the model
Effective stroke: Actual stroke during operation
Mass by stroke length
| Call stroke | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Effective stroke | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | |
| Mass (kg) | Without brake | 3.33 | 3.53 | 3.73 | 3.93 | 4.13 | 4.33 | 4.53 | 4.73 | 4.93 | 5.23 | 5.43 | 5.63 | 5.83 |
| With brake | 3.63 | 3.83 | 4.03 | 4.33 | 4.53 | 4.73 | 4.93 | 5.13 | 5.33 | 5.53 | 5.73 | 5.93 | 6.13 | |
(Note) Mass is the single slider specification plus 0.43 kg of free slider.
Correlation diagram of push force and current limit value (double slider type)
(Note) Same value as the single slider type.