Product feature



Model specification
| Model | Axis Configuration | Encoder type | Motor type | Lead (mm) | Stroke (mm) | Speed (mm/s) | Load Capacity (kg) |
|---|---|---|---|---|---|---|---|
| TTA-A3SL(G)-WA-40①-40②-③B④-⑤-⑥-⑦-⑧-⑨-⑩ | X axis | Battery-less absolute | AC servo motor | 8 | 400 | 1 - 600 | 30 |
| Y axis | 8 | 400 | 1 - 600 | - | |||
| Z axis | Equivalent to 2.14 | 100/150 | 1 - 170 | 15 | |||
| TTA-A3SH(G)-WA-40①-40②-③B④-⑤-⑥-⑦-⑧-⑨-⑩ | X axis | 16 | 400 | 1 - 1200 | 15 | ||
| Y axis | 16 | 400 | 1 - 1200 | - | |||
| Z axis | Equivalent to 5 | 100/150 | 1 - 400 | 7 | |||
| TTA-A3(G)-WA-40①-40②-③B④-⑤-⑥-⑦-⑧-⑨-⑩ | X axis | Pulse motor | Equivalent to 24 | 400 | 1 - 800 | 20 | |
| Y axis | Equivalent to 24 | 400 | 1 - 800 | - | |||
| Z axis | 12 | 100/150 | 1 - 400 | 6 |
Symbol description ① ② XY-axis option ③ Z-axis stroke ④ Z-axis option ⑤ Standard I/O slot ⑥ ⑦ Expansion I/O slot ⑧ I/O cable length ⑨ Power cable specification ⑩ Option
Actuator specification
| Heading | Contents | |
|---|---|---|
| AC servo motor | Pulse motor | |
| Drive system | Ball screw (X, Y-axes: φ12 mm Z-axis: φ10 mm Rolled, C5 equivalent) Low lead Z-axis: Speed reduces by 1:1.4 using a timing belt High lead Z-axes: Speed reduces by 1:1.2 using a timing belt | Ball screw (X, Y-axes: φ12 mm Z-axis: φ10 mm Rolled, C10) X, Y-axes: Speeds up by 1.5:1 using a timing belt |
| Accuracy of Repeating Positioning. | ±0.005mm | ±0.01mm |
| Lost motion | Low lead X, Y-axes: 0.025 mm or less Z-axis: 0.02 mm or less High lead X, Y-axes: 0.04 mm or less Z-axis: 0.02 mm or less | 0.05mm and below |
| Dynamic allowable moment | X-axis:Ma:18.8Nm Mb:18.8Nm Mc:37.8Nm Y-axis:Ma:14.9Nm Mb:14.9Nm Mc:44.3Nm Z-axis:Ma:11.5Nm Mb:11.5Nm Mc:24.3Nm | |
| Ambient temperature/humidity | 0 - 40℃, 85% RH Max (Non-condensing) | |
| Table part loading weight (Note 2) | 40kg | |
| Body weight | 40.3kg | |
(Note 2) The table part is the upper surface of the main body excluding the slider part. It is not the payload of the X axis.
Oversea specification


(Note) CE is compatible only with safety category compliant specifications.
Important notes on selection
| (1) The maximum acceleration/deceleration differs depending on the load capacity. (Refer to page 4-667) The maximum speed cannot be achieved with the pulse motor at the maximum payload setting. If increase speed, the load capacity will drop. (Refer to page 4-669) (2) Positioning repeatability is applicable only when the main body temperature is constant. It will not guarantee the absolute accuracy. (3) The value of the dynamic allowable moment is the value of each axis. When the standard rated life is 5,000 km and the standard load factor is 1.5. (Refer to page 4-671 for the dynamic allowable moment.) (4) Enter "E" in the expansion I/O slot 1 and 2 of the model item if it is not used. |
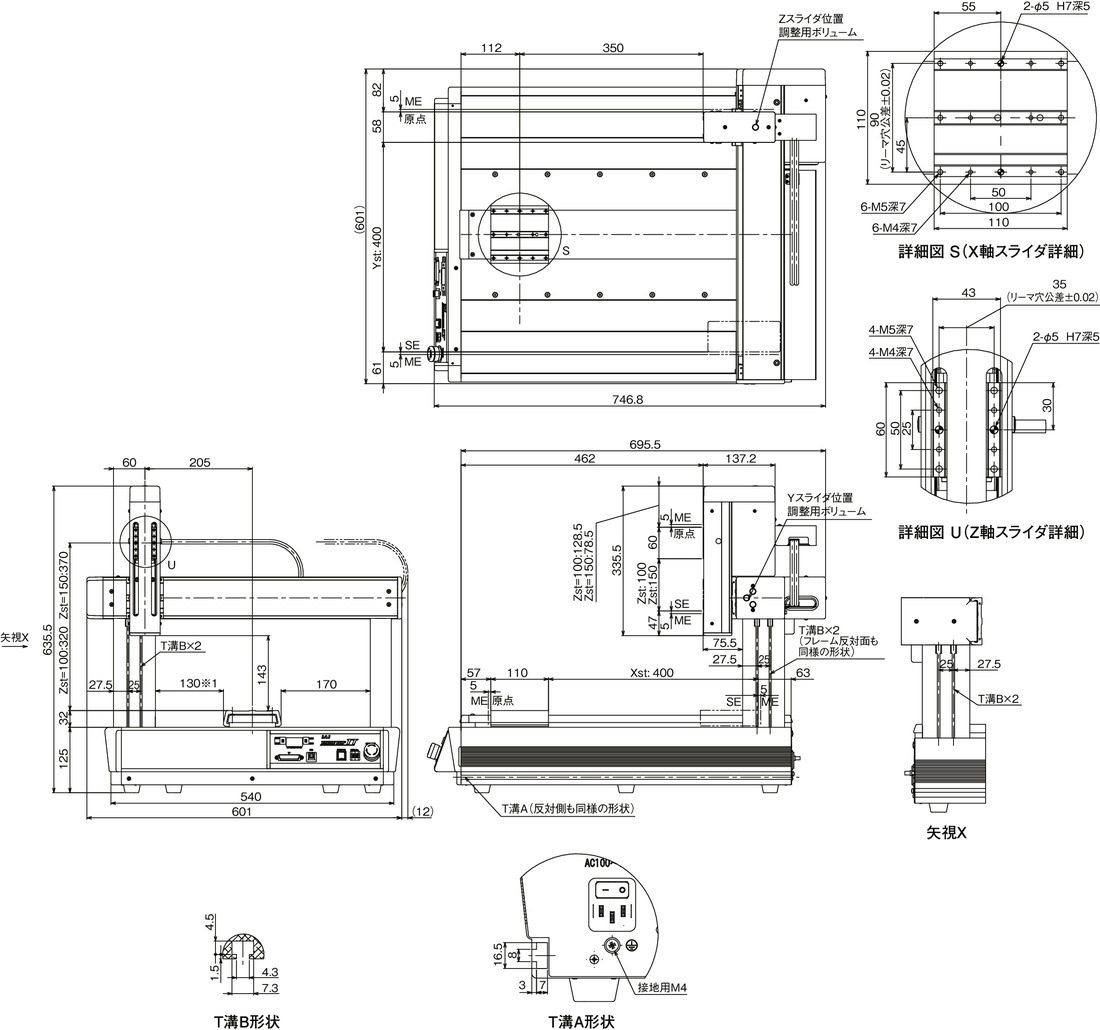
Dimension drawing

ME: Mechanical end
SE: Stroke end
*1 When placing a work on the X slider, make sure that there is a margin of 2 mm or more for the main frame.
(Note) During home return, the slider moves to the mechanical end. Pay attention to prevent contact between the slider and the surrounding.