
製品の特長



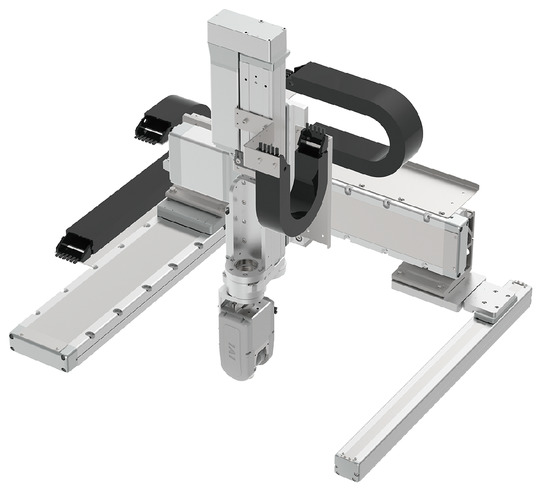
(注) 上写真は組合せ方向「1」、全軸ケーブルベア付の場合になります。
基本仕様
| 最大可動範囲 | X軸 1100 mm | Y軸 600 mm | Z軸 200 mm |
|---|---|---|---|
| 最大可搬質量 | 2 kg | ||
| 標準サイクルタイム | 1.66 秒 | ||
| 位置繰返し精度 | ± 0.04 mm | ||
標準サイクルタイムは下記条件で、往復の最速動作をした場合の動作時間です。

メインスペック
| 項目 | 内容 |
|---|---|
| 最大可搬質量 | 2㎏ |
| 位置繰返し精度 | ±0.04mm |
| 項目 | 内容 | |
|---|---|---|
| 使用環境温度・湿度 | 0~40℃、85%RH以下(結露なきこと) | |
| 保護等級 | - | |
| 耐振動・耐衝撃 | 4.9m/s2 | |
| 海外対応規格 | RoHS指令 | |
| エンコーダー種類 | バッテリーレスアブソリュート | |
| エンコーダーパルス数 | XYZ軸 | 16384pulse/rev |
| RBT軸 | 8192pulse/rev | |
| 納期 | ホームページ[納期照会]に記載 | |
構成軸スペック
PTP動作では、各軸の最大速度、最大加減速度で動作が可能です。
CP動作での速度、加減速度の上限値は、56ページの値を目安としてください。
X軸
| 項目 | 内容 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 構成軸型式 | RCS4-WSA16C-WA-400-20 | ||||||||||||
| 加減速度・ストローク別 最高速度 | 加減速度(G) | 0.4 | |||||||||||
| ストローク(mm) | 50~550 | 600 | 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | 1100 | |
| 最高速度(mm/s) | 1200 | 1120 | 990 | 880 | 780 | 715 | 645 | 590 | 535 | 490 | 450 | 415 | |
| ストローク | 最小ストローク(mm) | 50 | |||||||||||
| 最大ストローク(mm) | 1100 | ||||||||||||
| ストロークピッチ(mm) | 50 | ||||||||||||
| モーター種類 | ACサーボモーター 400W | ||||||||||||
Y軸
| 項目 | 内容 | ||||
|---|---|---|---|---|---|
| 構成軸型式 | RCS4-WSA14C-WA-200-16 | ||||
| 加減速度・ストローク別 最高速度 | 加減速度(G) | 0.5 | |||
| ストローク(mm) | 350~450 | 500 | 550 | 600 | |
| 最高速度(mm/s) | 960 | 920 | 790 | 690 | |
| ストローク | 最小ストローク(mm) | 350 | |||
| 最大ストローク(mm) | 600 | ||||
| ストロークピッチ(mm) | 50 | ||||
| モーター種類 | ACサーボモーター 200W | ||||
Z軸
| 項目 | 内容 | |
|---|---|---|
| 構成軸型式 | RCS4-SA8R-WA-400-10-□-B-W〈ダブルスライダー仕様〉 | |
| 速度/加減速度 | 加減速度(G) | 0.5 |
| 最高速度(mm/s) | 600 | |
| ストローク | 最小ストローク(mm) | 100 |
| 最大ストローク(mm) | 200 | |
| ストロークピッチ(mm) | 50 | |
| モーター種類 | ACサーボモーター 400W | |
R軸
| 項目 | 内容 | |
|---|---|---|
| 構成軸型式 | RCP6-RTFML-WA-42P-30-360 | |
| 速度/加減速度 | 加減速度(G)(注6) | 0.3 |
| 最高速度(度/s) | 800 | |
| 動作範囲(度) | ±180 | |
| 最大トルク(N・m)(注7) | 5.2 | |
| 最大許容慣性モーメント(kg・m2)(注7) | 0.08 | |
| モーター種類 | パルスモーター 42□サイズ | |
(注6) 1G≒9807度/s2
(注7) 速度、加減速度により異なります。詳細は55ページをご参照ください。
BT軸
| 項目 | 内容 | |||
|---|---|---|---|---|
| 軸構成 | B軸(手首揺動) | T軸(手首回転) | ||
| 構成軸型式 | WU-M-WA | |||
| 速度/加減速度 | 加減速度(G)(注8) | 0.3 | 0.3 | |
| 最高速度(度/s) | 単独動作 | 900 | 1200 | |
| B軸・T軸 同時動作 | 600 | 600 | ||
| 動作範囲(度) | ±105 | ±360 | ||
| モーター種類 | パルスモーター 35□サイズ | |||
| 最大トルク(N・m)(注9) | 1.65 | 1.65 | ||
| 最大許容慣性モーメント(kg・m2)(注9) | 0.015 | 0.0165 | ||
(注8) 1G≒9807度/s2
(注9) 速度、加減速度により異なります。詳細は55ページをご参照ください。
(注) BT軸はブレーキが標準装備です。
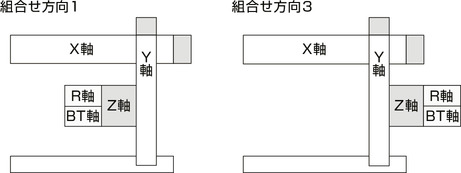
組合せ方向
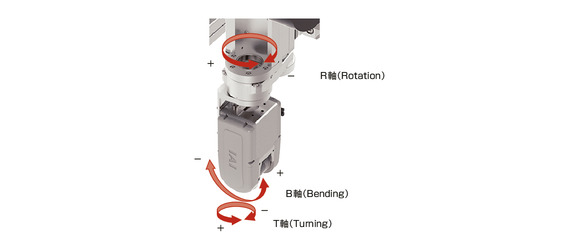
回転軸(R軸)/手首軸(B軸T軸)の動作方向
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。

選定上の注意
| (1)サイクルタイムは参考値です。ストローク、動作パターンによっては上記サイクルタイムより大きくなる場合があります。 (2)動作条件(搬送質量、加減速度等)によって、使用可能なデューティーの目安は変化します。詳細は13ページをご参照ください。 (3)R軸、BT軸のRSELドライバーユニットの高出力設定は、「有効」で使用してください。 (4)位置繰返し精度は、「JIS B 8432 産業用ロボットの性能試験条件」に準拠しています。 |
海外規格

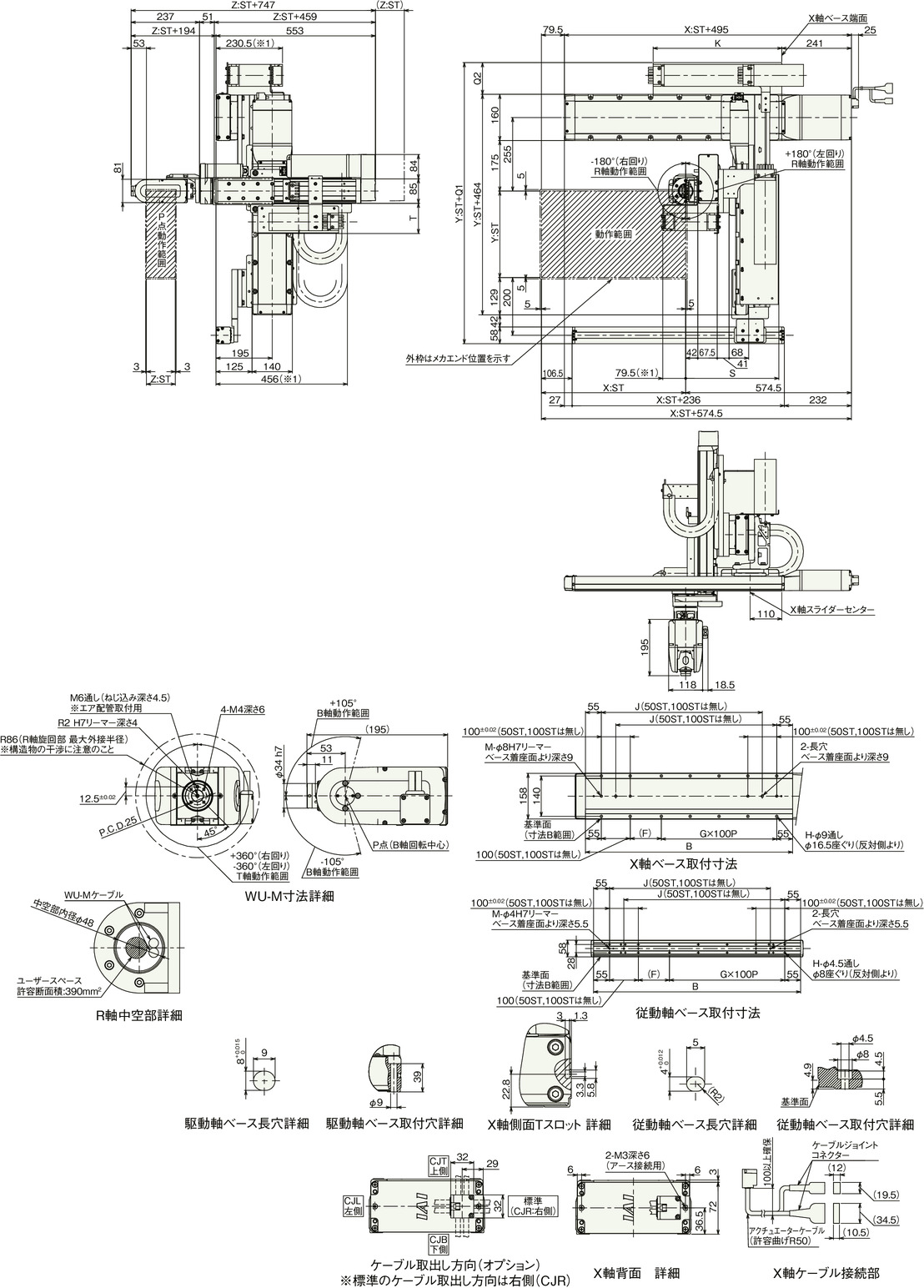
寸法図

※1 ケーブルベアが膨らみ、記載寸法より若干大きくなる可能性があります。
(注) 図面の組合せ位置が原点となります。
(注) 下記図面は、組合せ方向「1」・第1配線・第2配線・第3配線ともケーブルベア付きの場合の図面です。
その他の図面はホームページでご確認ください。
(注) 従動軸底面のねじ穴は梱包用です。取付けには使用しないでください。
ストローク別寸法
| X軸ストローク | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | 1100 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| B | 268 | 318 | 368 | 418 | 468 | 518 | 568 | 618 | 668 | 718 | 768 | 818 | 868 | 918 | 968 | 1018 | 1068 | 1118 | 1168 | 1218 | 1268 | 1318 |
| F | 158 | 208 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 |
| G | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | 7 | 7 | 8 | 8 | 9 | 9 | 10 | 10 |
| H | 4 | 4 | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 | 20 | 22 | 22 | 24 | 24 | 26 | 26 |
| J | - | - | 208 | 258 | 308 | 358 | 408 | 458 | 508 | 558 | 608 | 658 | 708 | 758 | 808 | 858 | 908 | 958 | 1008 | 1058 | 1108 | 1158 |
| K | 221 | 246 | 271 | 296 | 321 | 346 | 371 | 396 | 421 | 446 | 471 | 496 | 521 | 546 | 571 | 596 | 621 | 646 | 671 | 696 | 721 | 746 |
| M | 2 | 2 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 |
ストローク別寸法
| ケーブルベア サイズ | CT | CTM | CTL | CTXL |
|---|---|---|---|---|
| Q1 | - | 674 | 691 | 711 |
| Q2 | - | 110 | 127 | 147 |
| S | 312 | 323 | 340 | - |
| T | 104.5 | 115.5 | 132.5 | - |
(注) ケーブルベアのサイズにより、Q1、Q2、S、Tの寸法が変わります。
ストローク別本体質量
|
X軸ストローク(㎜) Y軸ストローク(㎜) | 50~400 | 450~800 | 850~1100 |
|---|---|---|---|
| 350~600 | 56~66 | 63~73 | 71~79 |
(単位はkg)
(注) 詳細の本体質量の計算方法は取扱説明書をご参照ください。
ケーブルベア断面図
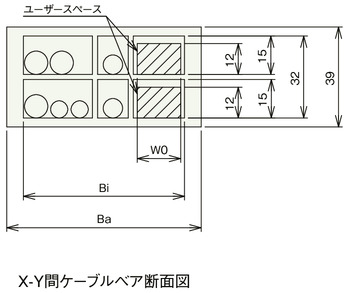
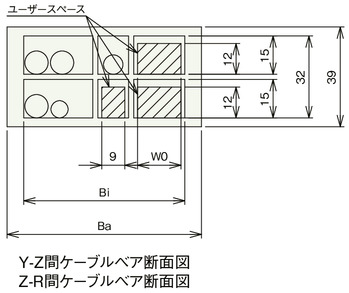
| ケーブルベアサイズ | CT | CTM | CTL | CTXL | |
|---|---|---|---|---|---|
| 使用ケーブルベア型式 | B17.4.075.0 | B17.5.075.0 | B17.6.075.0 | B17.7.075.0 | |
| Ba | 60.5 | 76 | 93 | 113 | |
| Bi | 50 | 63 | 80 | 100 | |
| W0 | 9 | 17 | 34 | 54 | |