








メインスペック
| 項目 | 内容 | |
|---|---|---|
| 把持動作 | 最大把持力(N)(両側) | 20 |
| 把持動作時間(s)(両側) | 0.03以下 | |
| 動作頻度(CPM) | 120 | |
| ストローク(片側) | 最小ストローク(mm)(片側) | 2 |
| 最大ストローク(mm)(片側) | 2 | |
CPM:Cycle per minute
| 項目 | 内容 |
|---|---|
| 駆動方式 | 把持機構(チャック):圧縮スプリング+カム機構 解放機構(アンチャック):ソレノイド電磁力+カム機構 |
| 繰返し位置決め精度 | ±0.1mm |
| 原点復帰精度 | - |
| バックラッシ | 片側0.5mm以下 |
| ロストモーション | - |
| フィンガーガイド | すべり案内 |
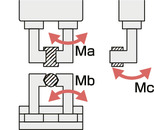
| 静的許容モーメント | Ma:1.08N・m |
| Mb:1.08N・m | |
| Mc:2.64N・m | |
| 動的許容モーメント | - |
| - | |
| - | |
| 許容スラスト荷重(垂直方向許容荷重) | 240N |
| 使用周囲温度・湿度 | 0~40℃、85%RH以下(結露なきこと) |
| 保護等級 | IP20 |
| 耐振動・耐衝撃 | 4.9m/s2 |
| 海外対応規格 | CEマーク、RoHS指令 |
| モーター種類 | - |
| エンコーダー種類 | - |
| エンコーダーパルス数 | - |
| 納期 | ホームページ[納期照会]に記載 |
スライドタイプモーメント方向
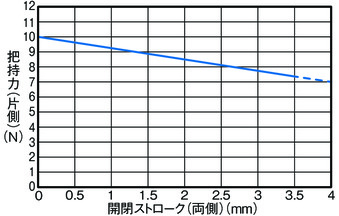
把持力と開閉ストロークの相関図
外径把持力(片側)
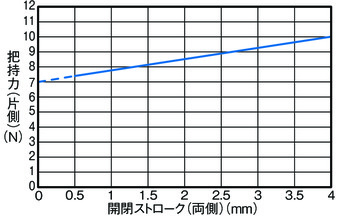
(注) 把持力はフィンガーの開閉ストロークにより変化します。
内径把持力(片側)
把持点距離の確認
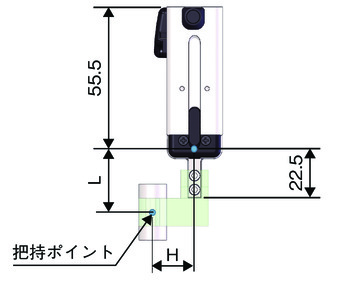
フィンガー(爪)取付け面から把持ポイントまでの距離(L、H)をグラフの範囲内となるようにご使用ください。
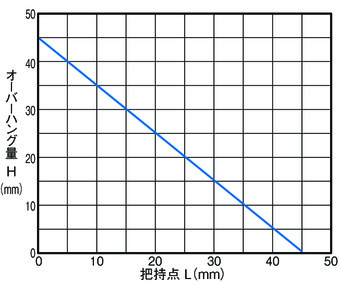
(注) 制限範囲を超えた場合はフィンガー摺動部および内部メカに過大なモーメントが作用して、寿命に悪影響を及ぼす原因となりますのでご注意ください。
適応コントローラー
(注) GRSシリーズを動作させるためには、ドライバーボックスが必要です。詳細は5-85ページをご確認ください。
選定上の注意
海外規格


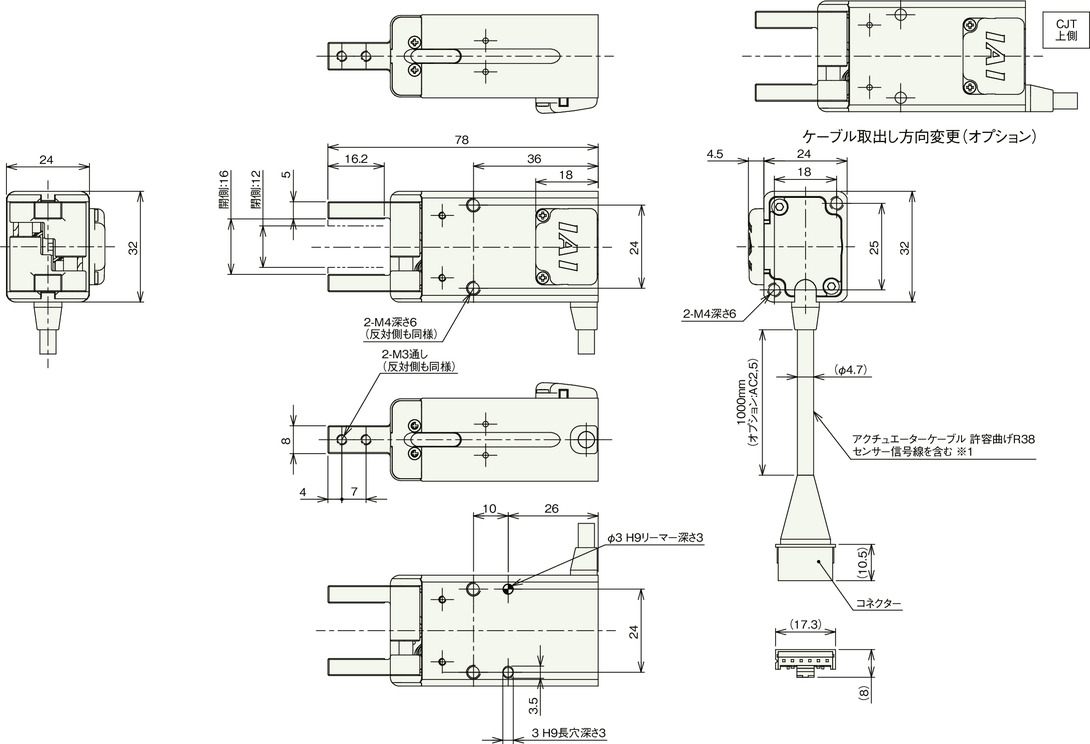
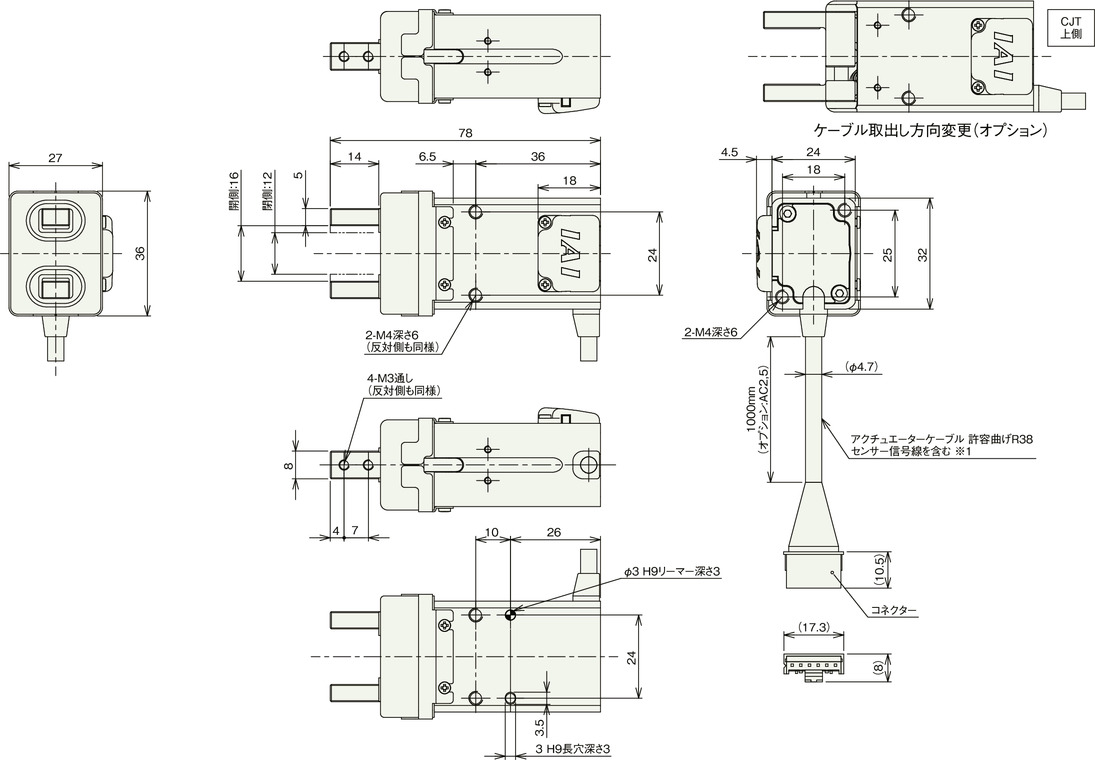
寸法図

※1 アクチュエーターケーブルはロボットケーブルです。ケーブルの長さは標準が1000mmで、オプション(型式:AC2/AC5)で2000mmまたは5000mmに変更できます。
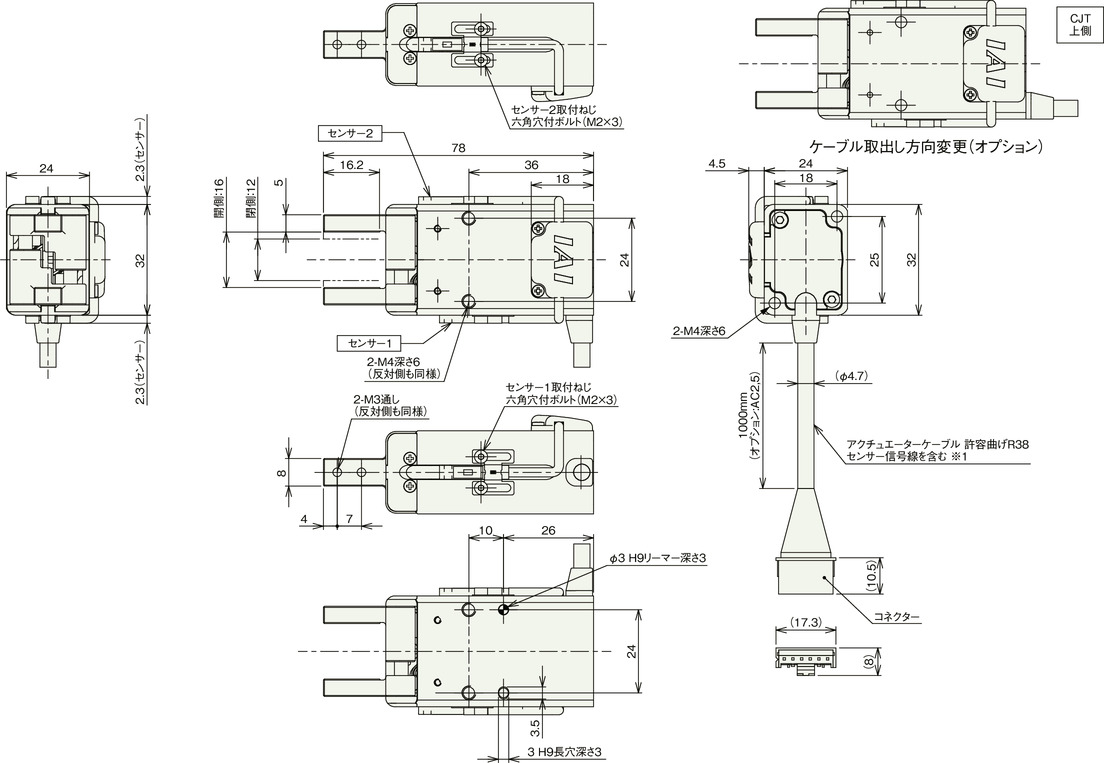
センサー取付(オプション)
※1 アクチュエーターケーブルはロボットケーブルです。ケーブルの長さは標準が1000mmで、オプション(型式:AC2/AC5)で2000mmまたは5000mmに変更できます。
ゴムカバー取付(オプション)
※1 アクチュエーターケーブルはロボットケーブルです。ケーブルの長さは標準が1000mmで、オプション(型式:AC2/AC5)で2000mmまたは5000mmに変更できます。
質量
| 項目 | 内容 |
|---|---|
| 質量 | 0.27kg |