メインスペック
| 項目 | 内容 | ||
|---|---|---|---|
| 4軸仕様 | |||
| 最大可搬質量(kg)(注1) | 8 | ||
| 速度 (注2) | 合成最高速度(mm/s) | 6623 | |
| 各軸最高速度 | 第1アーム(度/s) | 510 | |
| 第2アーム(度/s) | 800 | ||
| 上下軸(mm/s) | 1600 | ||
| 回転軸(度/s) | 2000 | ||
| 押付け(N)(注3) | 上限 | 135 | |
| 下限 | 25 | ||
| クリーンルーム仕様(注4) | 吸引量(NL/min) | 50 | |
| アーム長(mm) | 450 | ||
| 各軸アーム長(mm) | 第1アーム | 200 | |
| 第2アーム | 250 | ||
| 各軸動作範囲 | 第1アーム(度) | ±137 | |
| 第2アーム(度) | ±137 | ||
| 上下軸(mm) | 180/330 | ||
| 回転軸(度) | ±360 | ||
| 項目 | 内容 | |
|---|---|---|
| 4軸仕様 | ||
| 位置繰返し精度 (注5) | 水平面内 | ±0.01mm |
| 上下軸 | ±0.01mm | |
| 回転軸 | ±0.005度 | |
| ユーザー配線 | 10心(9心+シールド) AWG24(定格30V/MAX1A) | |
| ユーザー配管 | 外径φ6 内径φ4 エアチューブ3本 (最高使用圧力0.6MPa) | |
| LED表示灯(注6) | アンバー色LED 小型表示灯1個 DC24V供給必要 | |
| ブレーキ解除スイッチ(注7) | 上下軸落下防止用ブレーキ解除スイッチ | |
| 先端軸 | 許容トルク | 3.2N・m |
| 許容負荷モーメント | 8.3N・m | |
| クリーン度 | クラス3 (ISO14644-1) | |
| 使用周囲温度・湿度 | 0~40℃、20~85%RH以下(結露なきこと) | |
| 保護等級 | IP40 | |
| 耐振動・耐衝撃 | 振動・衝撃が加わらないこと | |
| 騒音(注8) | 80dB以下 | |
| 海外対応規格 | CEマーク、RoHS指令 | |
| モーター種類 | ACサーボモーター | |
| モーター容量 | 第1アーム | 600W |
| 第2アーム | 400W | |
| 上下軸 | 200W | |
| 回転軸 | 100W | |
| エンコーダー種類 | バッテリーレスアブソリュート | |
| エンコーダーパルス数 | 131,072 pulse/rev | |
| 納期 | ホームページ[納期照会]に記載 | |
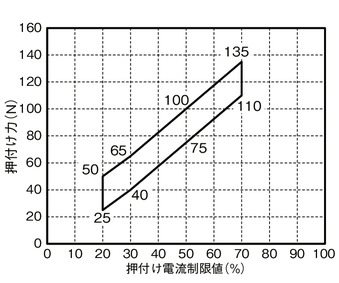
押付け力と電流制限値の相関図(参考値)
上下軸の先端部の押付け力です。(注3)
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| XSEL-RAX4/SAX4(IXA用) |  | 4 | 三相AC200V | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | - | - | - | 36666 |
(注) DV、CCなどのネットワーク略称記号については、8-15ページをご確認ください。
海外規格


選定上の注意
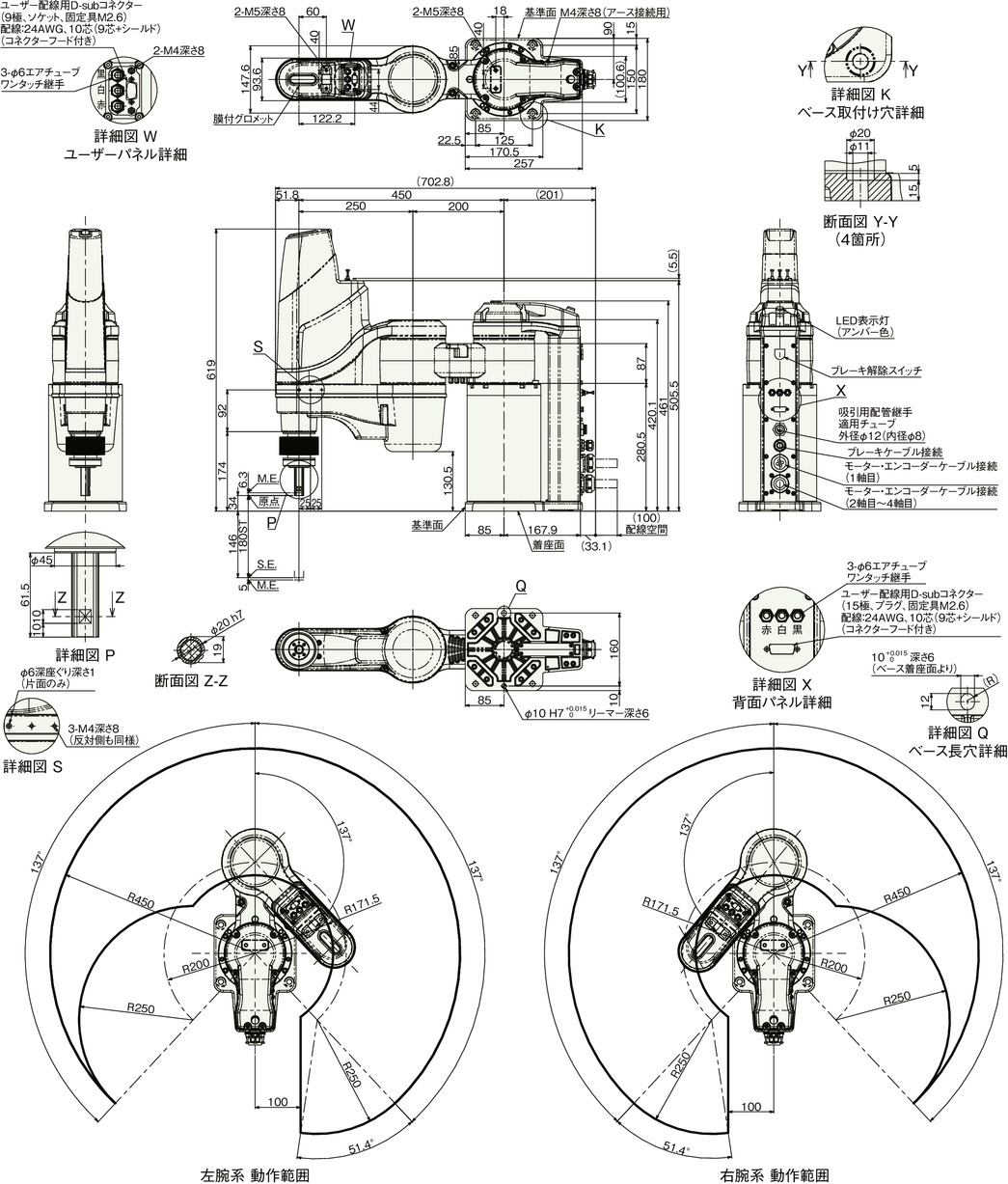
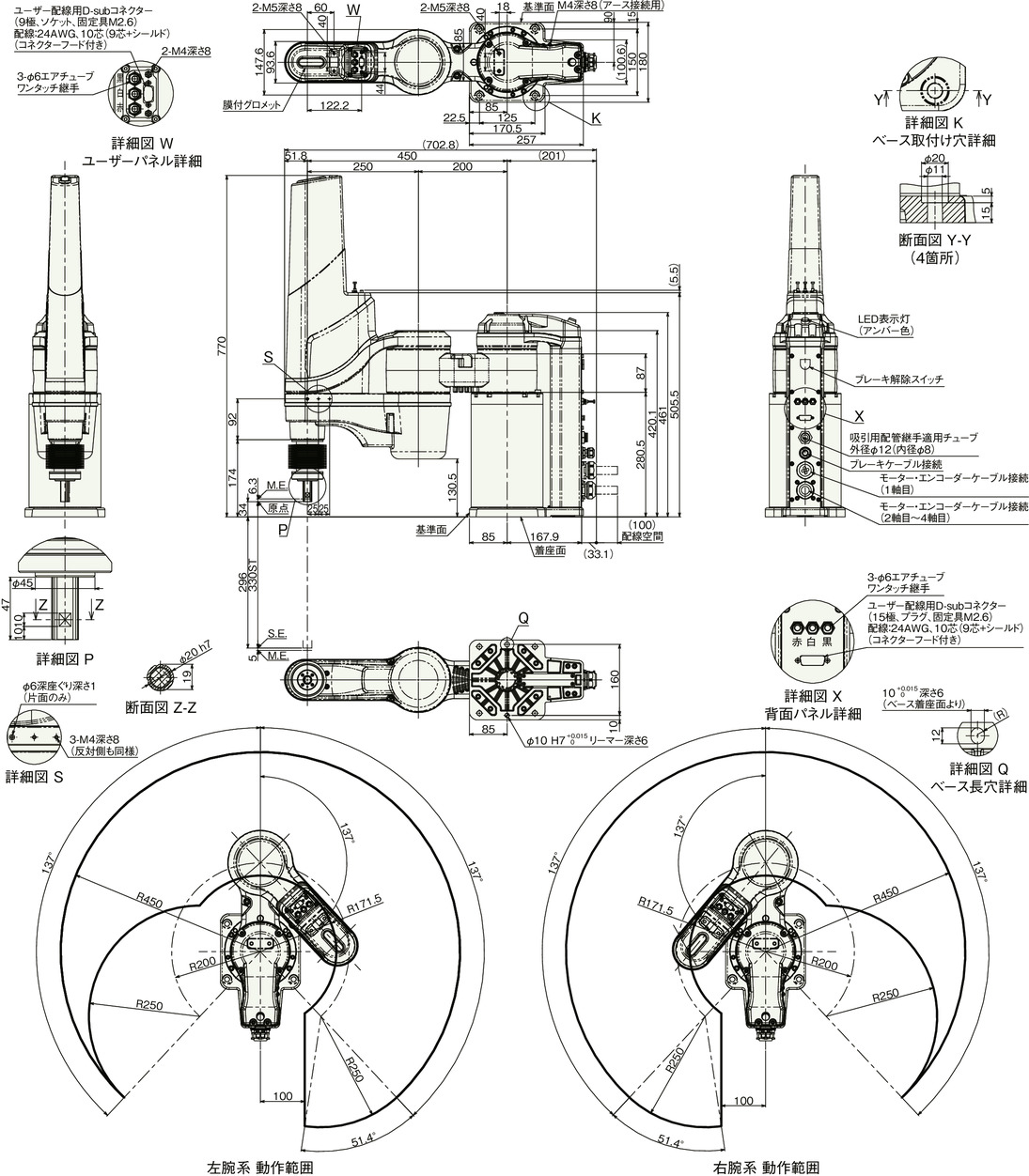
寸法図

サイクルタイム
| 項目 | 時間 |
|---|---|
| 標準サイクルタイム | 0.28秒 |
| 連続サイクルタイム | 0.51秒 |
標準/連続サイクルタイムは下記の条件で、最速となる往復の動作設定にて動作をした場合の所要時間を表します。
2kg 搬送、上下移動25mm、水平移動300mm(粗位置決めアーチモーション)
【標準サイクルタイム】
最速動作の場合の所要時間です。一般に高速性能の目安となります。
最速動作での連続動作はできませんのでご注意ください。
【連続サイクルタイム】
連続動作を行う場合のサイクルタイムとなります。

先端軸許容慣性モーメント
| 軸数 | 先端軸許容慣性モーメント |
|---|---|
| 4軸仕様 | 0.12 kg・m2 |
スカラロボットの先端軸(回転軸)中心換算の慣性モーメント許容値です。先端軸中心からツール重心までのオフセット量は、以下の数値以内としてください。ツール重心位置が先端軸中心位置を離れた場合は、速度・加速度を適宜落とす必要があります。負荷や動作条件によって張出し長は制限されます。
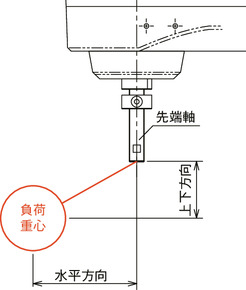
| 水平方向 | 上下方向 |
|---|---|
| 180mm以下 | 100mm以下 |
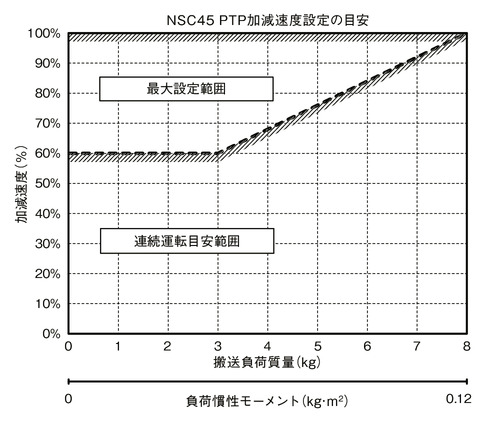
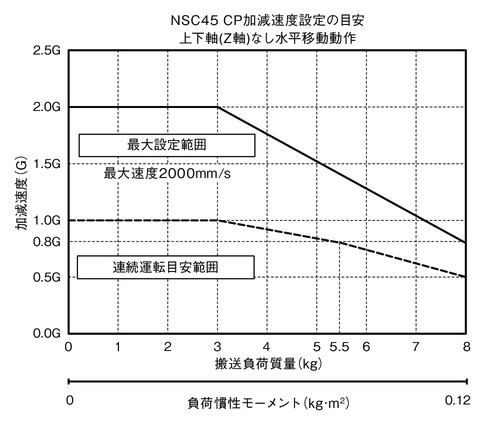
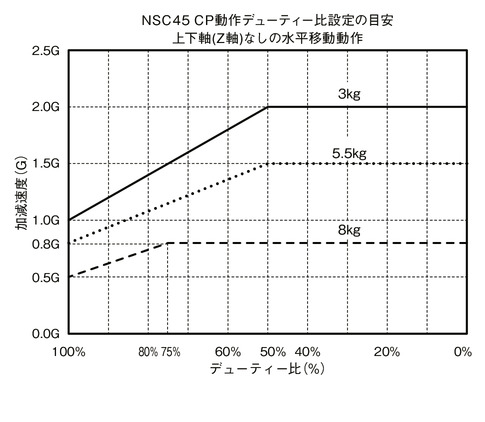
加減速度設定の目安
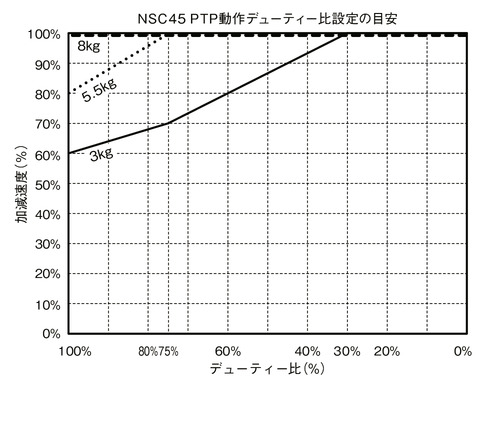
スカラロボットIXAは、カタログの最大加減速度、最大速度での連続運転は出来ません。最大加減速度で動作する場合は、連続運転デューティー比の目安グラフを参考に停止時間を設けてください。連続で動作が必要な場合は、加減速度設定の目安グラフの、連続運転目安範囲の加減速度設定で動作させてください。
(1) PTP動作の場合は必ずプログラム上にてWGHT命令を使って、質量、慣性モーメントを設定し動作させてください。スカラは各可搬質量で動作することの出来る最大加減速度を100%としています。同じ加減速度、速度設定でも搬送質量が異なると、動作時間も異なりますのでご注意ください。
(2) 加減速度は連続運転目安値より徐々に設定値を上げて調整するようにしてください。
(3) 過負荷エラーが出る場合は加減速度を適宜下げるか、連続運転デューティー比の目安を参考に停止時間を設ける調整を行ってください。
(4) デューティー比(%)=(運転時間/(運転時間+停止時間))×100
(5) ロボットを高速で水平移動させたい場合はできるだけ上下軸を上昇端付近で動作させてください。
(6) 慣性モーメント、搬送質量は許容値以下としてください。
(7) 可搬質量は回転軸中心の慣性モーメント、質量を示します。
(8) 質量、慣性モーメントに応じた適切な加減速度を守ってロボットを運転してください。守らなかった場合は、駆動部の早期寿命や破損、振動を招きます。
(9) 負荷の慣性モーメントが大きい場合、上下軸の位置によっては、上下軸に振動が発生する場合があります。振動が発生した場合は適宜加減速度を落として使用してください。
PTP動作
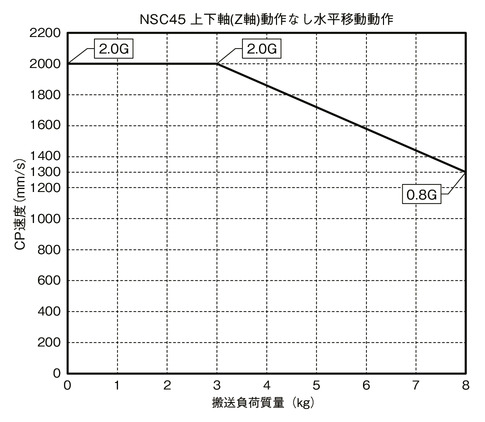
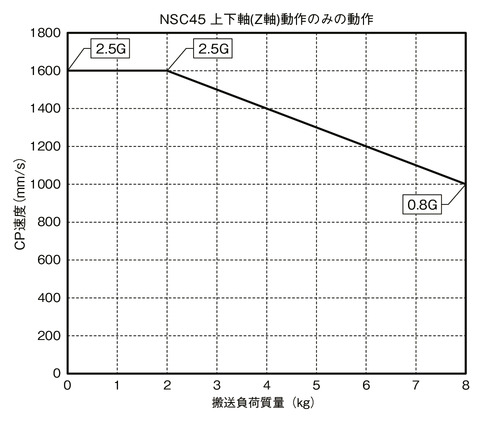
CP動作
水平
上下
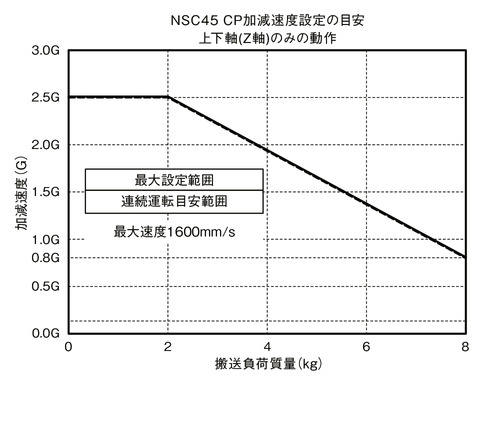
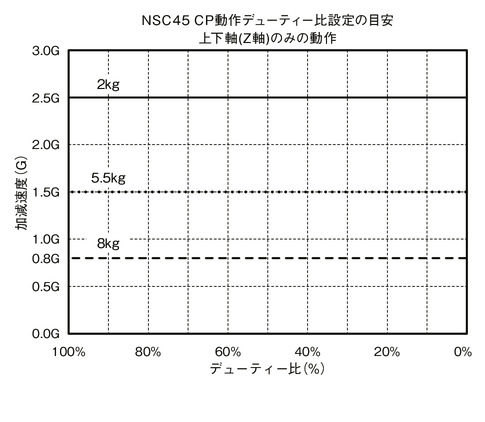
CP動作 速度・加減速度制限