









メインスペック
| 項目 | 内容 | |
|---|---|---|
| 減速比 | 1/30 | |
| リード | ボールねじリード(mm) | 1.57相当 |
| 把持動作 | 最大把持力(N)(両側) | 14 |
| 把持動作時の最高速度(mm/s)(片側) | 5 | |
| アプローチ動作 | 最高速度(mm/s)(片側) | 78 |
| 最低速度(mm/s)(片側) | 5 | |
| 定格加減速度(G)(片側) | 0.3 | |
| 最高加減速度(G)(片側) | 0.3 | |
| クリーンルーム仕様 | バキューム量(Nl/min) | 10 |
| ブレーキ | ブレーキ仕様 | - |
| ブレーキ保持力(kgf) | - | |
| ストローク(片側) | 最小ストローク(mm)(片側) | 4 |
| 最大ストローク(mm)(片側) | 4 | |
| 項目 | 内容 |
|---|---|
| 駆動方式 | ウォームギア+はすばギア+はすばラック |
| 繰返し位置決め精度 | ±0.01mm |
| 原点復帰精度 | - |
| バックラッシ | 片側0.2mm以下(但しスプリングにより常時開側に加圧) |
| ロストモーション | 片側0.05mm以下 |
| リニアガイド | 有限ガイド |
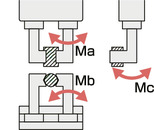
| 静的許容モーメント | Ma:0.5N・m |
| Mb:0.5N・m | |
| Mc:1.5N・m | |
| 動的許容モーメント | - |
| - | |
| - | |
| 許容スラスト荷重(垂直方向許容荷重) | - |
| クリーン度 | クラス10(0.1μm、Fed.Std.209D)、クラス2.5相当(ISO 14644-1規格) |
| 使用周囲温度・湿度 | 0~40℃、85%RH以下(結露なきこと) |
| 保護等級 | - |
| 耐振動・耐衝撃 | 4.9m/s2 |
| 海外対応規格 | CEマーク、RoHS指令 |
| モーター種類 | パルスモーター |
| エンコーダー種類 | インクリメンタル |
| エンコーダーパルス数 | 800 pulse/rev |
| 納期 | ホームページ[納期照会]に記載 |
スライドタイプモーメント方向
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MSEL-PC/PG |  | 4 | 単相AC 100~230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● ※選択 | ● ※選択 | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (ネットワーク仕様は768) |
| PCON-CYB/PLB/POB |  | 1 | ● ※選択 | ● ※選択 | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 (ML3,SSN,ECMは8) | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3,SSN,ECMはポジションデータなし) | |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(注) DV、CCなどのネットワーク略称記号については、8-17ページをご確認ください。
海外規格


選定上の注意
| (1)「メインスペック」の開閉最高速度は片側の動作速度を表します。相対動作速度はこの値の2倍になります。 (2)「メインスペック」の最大把持力は、把持ポイント距離0、オーバーハング距離0の場合の、両フィンガー把持力の合計値です。実際に搬送出来るワーク質量は「把持点距離の確認」をご参照ください。 (3)ワークを把持する時は必ず押付け動作をご使用ください。詳細は1-307ページをご参照ください。 (4)簡易アブソで使用される場合も型式項目のエンコーダー種類欄は「 I 」になります。 |
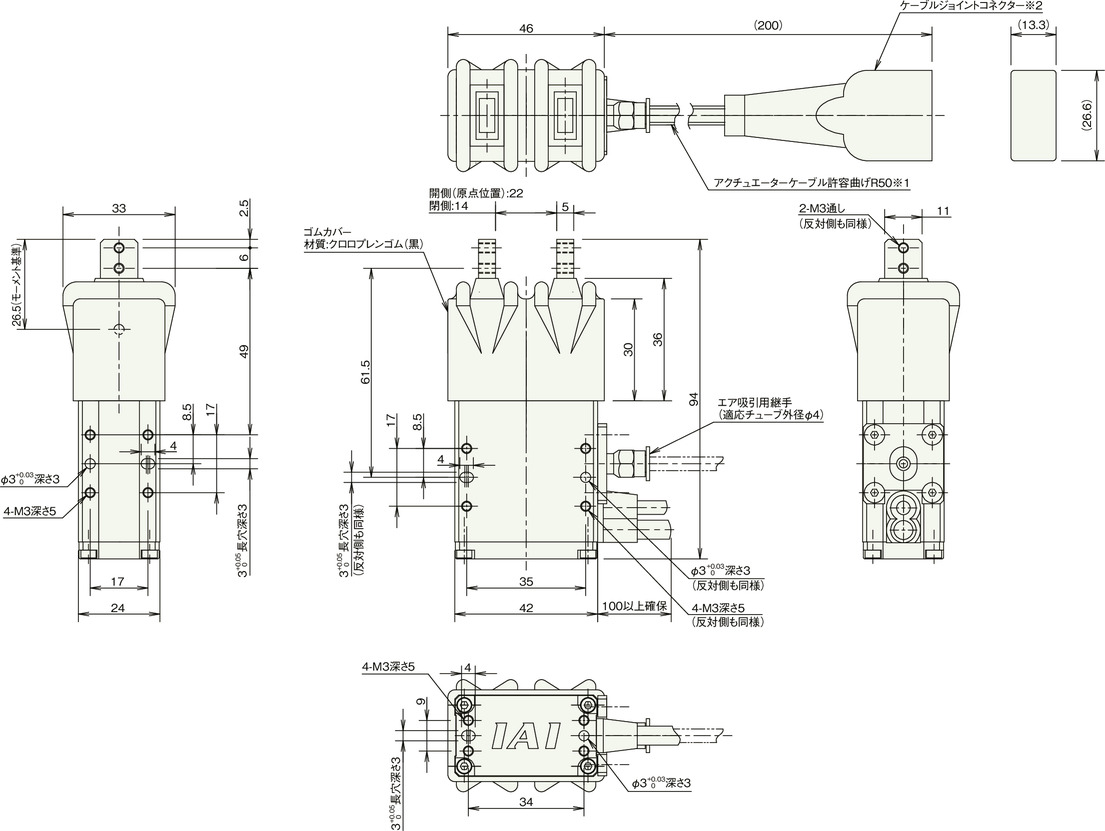
寸法図

※1 アクチュエーターケーブルはロボットケーブルではありません。
※2 ケーブルジョイントコネクターにモーター・エンコーダーケーブルを接続します。
(注) スライダーは開側が原点となります。
質量
| 項目 | 内容 |
|---|---|
| 質量 | 0.2kg |
把持点距離の確認
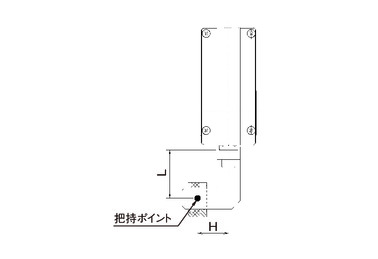
フィンガー(爪)取付け面から把持ポイントまでの距離(L、H)をグラフの範囲内となるようにご使用ください。
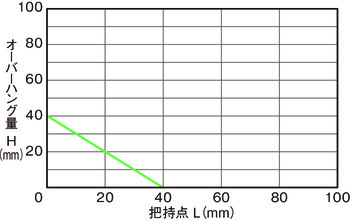
(注) 制限範囲を超えた場合はフィンガー摺動部および内部メカに過大なモーメントが作用して、寿命に悪影響を及ぼす原因となります。
把持力
■把持力と電流制限値の相関図
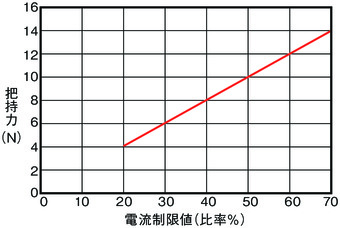
(注) 把持力は把持点距離(L、H)が0の場合となり、両フィンガーの合計値です。
(注) 目安の数字です。最大で±15%程度のバラツキがあります。
(注) 把持(押付け)を行う場合は速度が5mm/s固定となります。
■把持点距離と把持力の目安
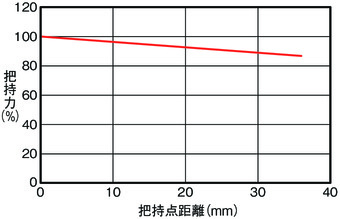
(注) 最大把持力を100%とした時の把持点距離による把持力を示しています。