








メインスペック
| 項目 | 内容 | ||
|---|---|---|---|
| 減速比 | 1/30 | 1/45 | |
| 最大トルク(N・m) | 0.24 | 0.36 | |
| 速度/加減速度(注1) | 最高速度(度/s) | 400 | 266 |
| 定格加減速度(G) | 0.2 | 0.2 | |
| 最高加減速度(G) | 0.2 | 0.2 | |
| クリーンルーム仕様 | バキューム量 (Nl/min) | 10 | |
| ブレーキ | ブレーキ仕様 | 無励磁作動電磁ブレーキ | |
| ブレーキ保持トルク(N・m) | 0.4 | ||
| 動作範囲(度) | 330度回転仕様 | 330 | |
| 360度多回転仕様 | 360 | ||
(注1) 1G≒9807度/s2
| 項目 | 内容 | |
|---|---|---|
| 駆動方式 | ハイポイドギア | |
| 繰返し位置決め精度 | ±0.05度 | |
| 原点復帰方式 | 330度回転仕様 | メカストッパー方式 |
| 360度多回転仕様 | 近接センサー方式 | |
| 原点復帰精度 | 330度回転仕様 | ±0.05度 |
| 360度多回転仕様 | ±0.05度 | |
| ロストモーション | ±0.1度 | |
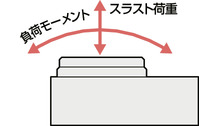
| 許容スラスト荷重 | 30N | |
| 許容負荷モーメント | 3.6N・m | |
| 許容慣性モーメント | 減速比 1/30 | 0.0023kg・m2 |
| 減速比 1/45 | 0.0035kg・m2 | |
| クリーン度 | クラス10(0.1μm、Fed.Std.209D) | |
| 使用周囲温度・湿度 | 0~40℃、85%RH以下(結露なきこと) | |
| 保護等級 | - | |
| 耐振動・耐衝撃 | 4.9m/s2 | |
| 海外対応規格 | CEマーク、RoHS指令 | |
| モーター種類 | パルスモーター | |
| エンコーダー種類 | インクリメンタル | |
| エンコーダーパルス数 | 800 pulse/rev | |
| 納期 | ホームページ[納期照会]に記載 | |
ロータリータイプモーメント方向
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MSEL-PC/PG |  | 4 | 単相AC 100~230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● ※選択 | ● ※選択 | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (ネットワーク仕様は768) |
| PCON-CYB/PLB/POB |  | 1 | ● ※選択 | ● ※選択 | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 (ML3,SSN,ECMは8) | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3,SSN,ECMはポジションデータなし) | |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(注) DV、CCなどのネットワーク略称記号については、8-17ページをご確認ください。
(注) ML3、SSN、ECM仕様では回転軸インデックスモードは使用できません。
海外規格


選定上の注意
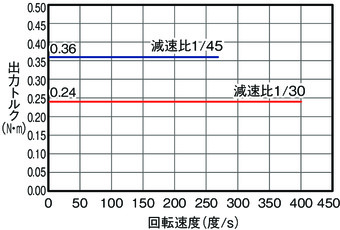
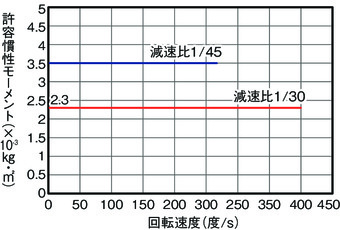
| (1)出力トルクは回転速度がアップするにつれて減少します。詳細は「速度と出力トルク、許容慣性モーメントの相関図」でご確認ください。 (2)回転させられるワークの許容慣性モーメントは、回転速度により異なります。詳細は「速度と出力トルク、許容慣性モーメントの相関図」でご確認ください。 (3)360度多回転仕様は、コントローラーによってインデックスモードでの制御ができない場合があります。詳細は「動作モードとコントローラーとの組合せの注意事項」をご参照ください。 (4)簡易アブソで使用される場合も型式項目のエンコーダー種類欄は「 I 」になります。 |
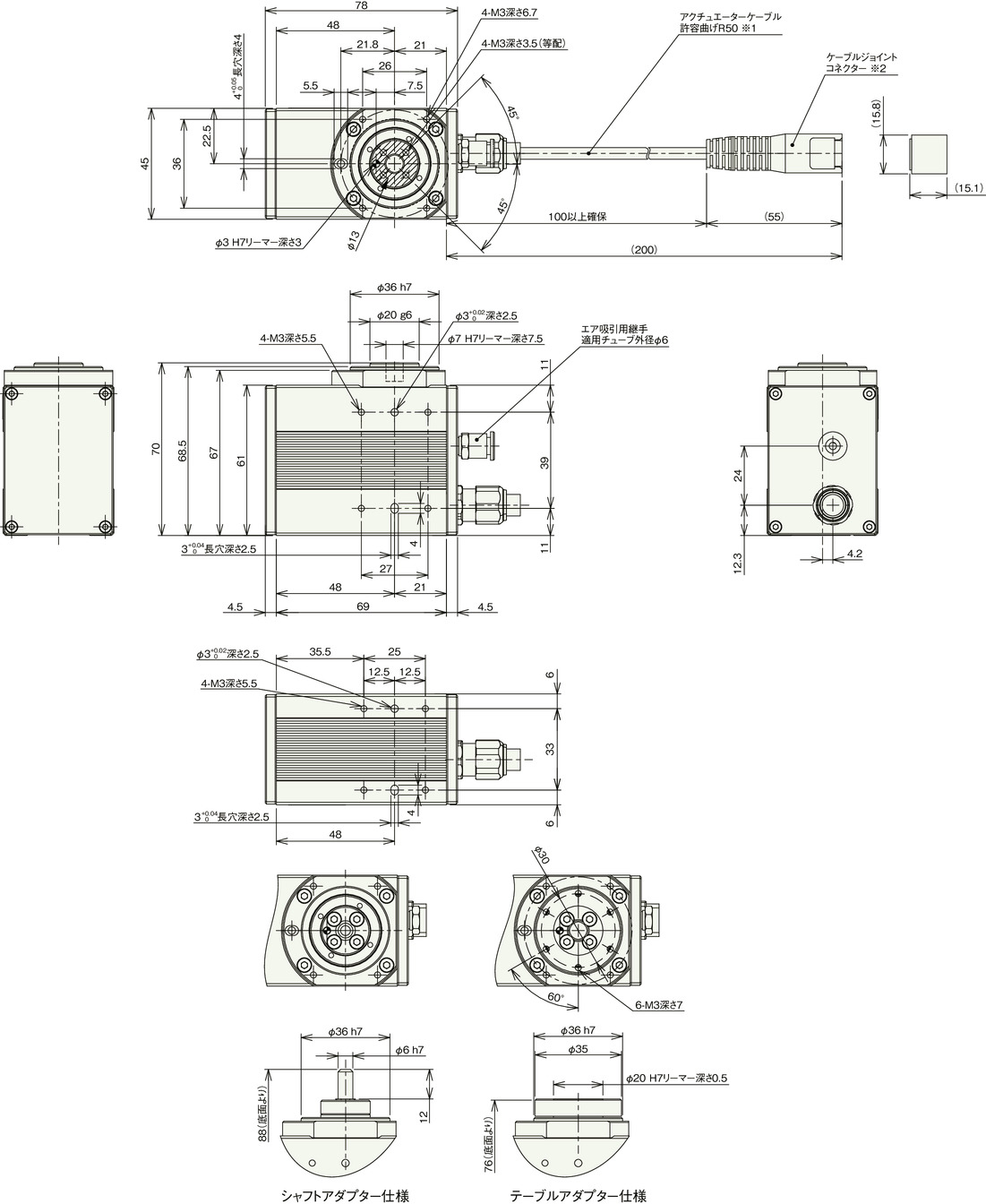
寸法図

※1 アクチュエーターケーブルはロボットケーブルです。
※2 ケーブルジョイントコネクターにモーター・エンコーダーケーブルを接続します。
(注) 下平面図は斜線部が回転部となります。
(注) 標準仕様/逆回転仕様(オプション)とも下平面図回転部の位置が原点位置となります。
原点復帰時、標準仕様は上から見て左に回転して原点復帰を行い、原点復帰完了後右回転で動作を行います。
逆回転仕様は、右に回転して原点復帰を行い、原点復帰完了後左回転で動作を行います。
出荷後に回転方向を変更することは構造上出来ませんので、ご注意ください。
質量
| 項目 | 内容 |
|---|---|
| 質量 | 0.6kg |
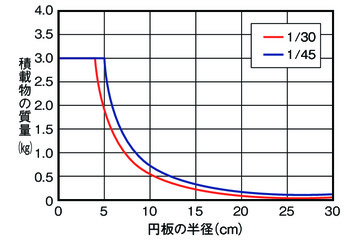
速度と出力トルク、許容慣性モーメントの相関図
■回転速度と出力トルクの相関図
■回転速度と許容慣性モーメントの相関図
原点復帰方法と正回転方向
■330度回転仕様
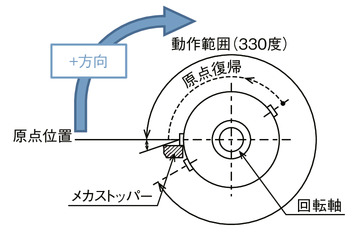
回転部上面から見て、時計方向の回転が+方向となります。
原点復帰動作は反時計方向に回転します。
メカストッパー位置を検出し、反転動作後、停止します。
原点復帰動作を時計方向にすることはできません。
■360度多回転仕様
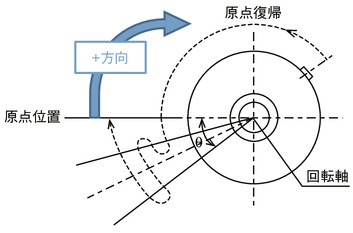
回転部上面から見て、時計方向の回転が+方向となります。
原点復帰動作は反時計方向に回転します。
センサーを検出してθの範囲(注2)を動作後、停止します。
(注2) 原点復帰範囲θ:約40度
原点センサーの検出距離によって多少バラツキます。目安としてください。
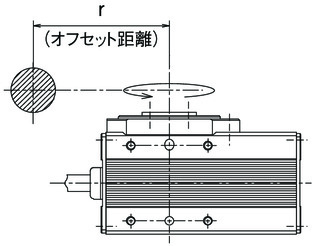
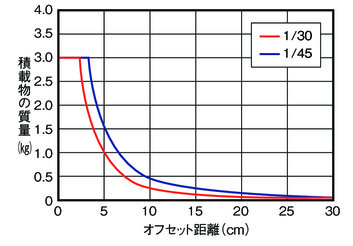
積載物形状と質量の目安
■円板状の積載物の中心が出力軸中心となる場合
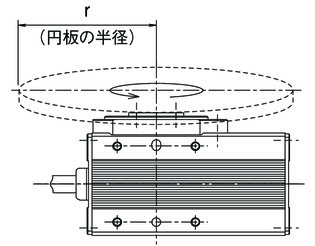
■出力軸中心からオフセットする積載物の場合
動作モードとコントローラーとの組合せの注意事項
330度回転仕様はインデックスモードで使用できません。360度多回転仕様は以下の注意点があります。
| 動作モード | 動作説明 | 動作範囲 | 簡易アブソ対応 | コントローラー選定時の注意 |
|---|---|---|---|---|
| インデックスモード (出荷時設定) | 回転軸を1回転させると、現在座標が0degになります。 一方向に回転させ続ける用途で使用します。 | 0~359.99 | 可能 | 以下のタイプは対応不可 PCON-CB/CFBコントローラー ・パルス列制御タイプ ・ML3 PCON-PLB/POBコントローラー RCON、MCONコントローラー ・ネットワークタイプML3、SSN、ECM |
| ノーマルモード | 有限の範囲で回転させる用途で使用します。 0degに戻す為には、逆回転が必要です。 | 0~9999.99(注3) | 可能 |
(注3) ソフトリミットのパラメーターの手動設定が必要です。