製品の特長


型式スペック
| 型式 | 軸構成 | アーム長 (mm) | モーター 容量 (W) | 動作範囲 | 繰返し 位置決め 精度 (mm) (注1) | PTP動作時 最大 動作速度 (注2) | 標準 サイクル タイム (s) (注3) | 可搬質量 (kg)(注4) | 第3軸(上下軸) 押付け力制御範囲(N) | 第4軸 許容負荷 | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 定格 | 最大 | 上限 (注5) | 下限 (注5) | 許容慣性 モーメント (kg・m2)(注6) | 許容 トルク (N・m) | |||||||||
| IX-NNN1205-①-T2-② | 1軸 | 第1アーム | 45 | 12 | ±115度 | ±0.005 (XY) | 2053mm/s (合成速度) | 0.35 | 0.2 | 1.0 | 14.7 | 9.8 | 0.000386 | 0.13 |
| 2軸 | 第2アーム | 75 | 12 | ±145度 | ||||||||||
| 3軸 | 上下軸 | - | 12 | 50mm | ±0.010 | 720mm/s | ||||||||
| 4軸 | 回転軸 | - | 60 | ±360度 | ±0.005 | 1800度/s | ||||||||
記号説明 ① ケーブル長 ② オプション
アクチュエーター仕様
| 項目 | 内容 |
|---|---|
| エンコーダー種類 | アブソリュート |
| ユーザー配線 | 8芯AWG26シールド付き コネクター:SMP-08V-NC (JST) |
| ユーザー配管 | 外径φ3内径φ2 エアチューブ2本 (常時使用圧力0.7MPa) |
| アラーム表示灯(注7) | 赤色LED小型表示灯1個 (DC24V供給必要) |
| 周囲温度・湿度 | 温度0~40℃ 湿度20~85%RH以下(結露無きこと) |
| 本体質量 | 2.7kg |
| ケーブル長(注9) | 3L:3m(標準) 5L:5m |
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| XSEL-PX/QX |  | 6 | 三相AC200V | - | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
| XSEL-RAX/SAX XSEL-RAXD/SAXD(IX用) |  | 8 | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | - | - | - | 36666 (タイプにより異なります) | |
(注) DV、CCなどのネットワーク略称記号については、7-17ページをご確認ください。
(注) 最大でスカラ+4軸ロボットの制御が可能です。
(注) スカラを2台接続する場合はXSEL-RAXD/SAXDをお選びください。ただし、スカラロボットの組合せによっては接続できない場合があります。7-289ページにてご確認ください。
海外規格


(注) CEはオプションになります。
選定上の注意
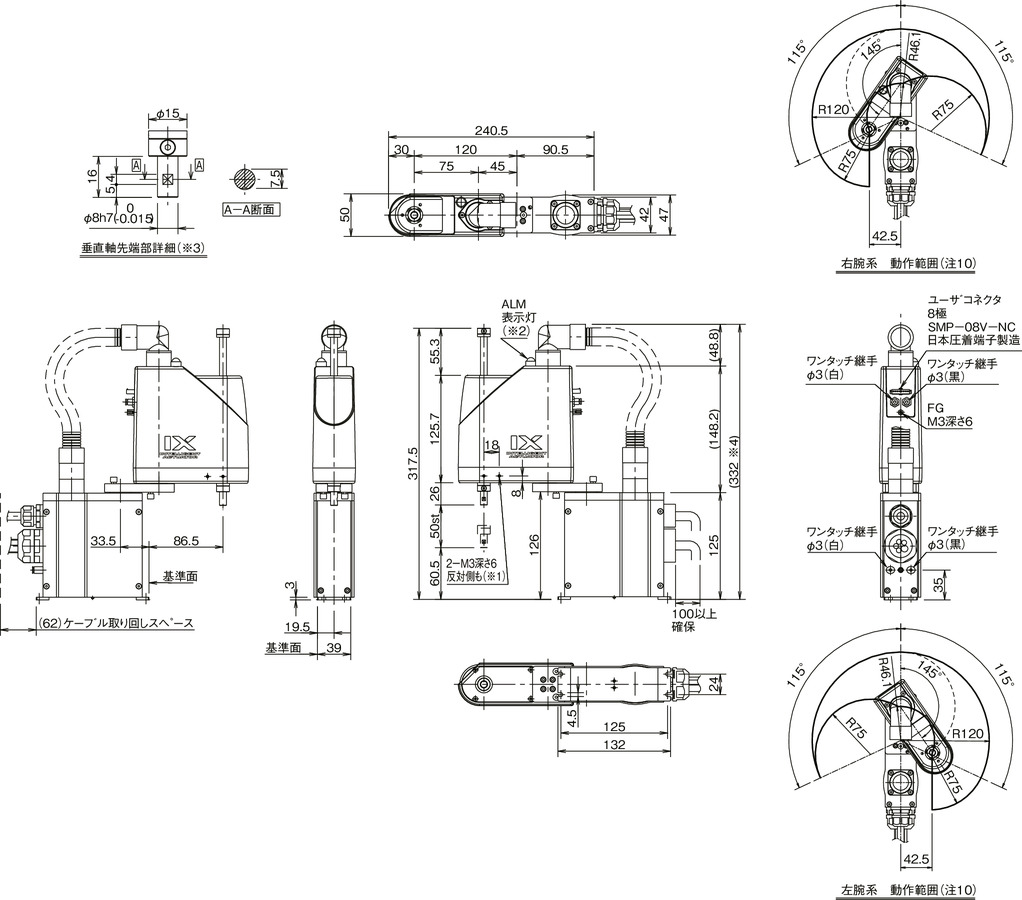
寸法図

※1 2-M3深さ6はアームを貫通しています。取付けねじが長いと内部機構部品に干渉しますので注意してください。
※2 お客様がコントローラーのI/O出力より信号をとりユーザー配線内にあるLED端子にDC24Vを加える配線処理をすることによりALM表示灯が点灯します。
※3 標準は上下軸にブレーキが付いていません。電源OFFもしくはサーボOFFにより垂直軸が落下する場合がありますのでご注意ください。
※4 指定ポジションのアクチュエーター姿勢により、高さ寸法が異なります。最大目安値を明記しています。