
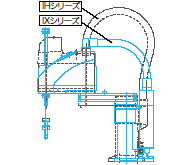
パワーコンスカラIXPシリーズが登場!!
IXP
パルスモータ採用により低価格を実現。
クラストップの性能と高いコストパフォーマンスを実現
クラストップレベルの高速・高可搬・高精度を実現したスカラロボット(水平多関節ロボット)です。

2014年07月02日 発売

IXP
パルスモータ採用により低価格を実現。
2012年12月25日 発売

IX-1000/2000
最大2400mmの広範囲の搬送が可能。同等の動作範囲の直交ロボットに比べ設置スペースは約1/80。
スカラロボット(水平多関節ロボット)IXシリーズは、旧IHシリーズのすべての部品を見直し再設計することで高速性能、可搬質量、繰り返し位置決め精度のすべてにおいてクラストップレベルのスペックを実現しました
加えて、使いやすさ、ラインナップ、コストパフォーマンスにおいても他社の追随を許しません。
| 標準サイクルタイム(※1) | 0.44sec(アーム長500タイプ) 0.35sec(超小型タイプ) |
|---|---|
| 繰り返し位置決め精度 | ±0.01mm/±0.005度 ±0.15mm/±0.005度(アーム長700/800タイプ) |
| 最大可搬質量 | 20kg(アーム長700/800タイプ) 1.0kg(超小型タイプ) |

旧タイプ(IHシリーズ)と比較して、
大幅なコンパクト化を実現しました。
アーム1にアルミ押し出し材を使用することで剛性アップと軽量化を両立し、低慣性化を実現しました。

コントローラの処理速度アップと、本体剛性アップにより軌跡精度が大幅にアップしました。
また3次元円弧や3次元パス動作により塗布作業が簡単且つ正確に行えます。
パスはポイントを多く取ってもプログラムは1行で済みます。
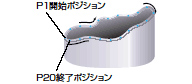
| 命令 | 操作1 | 操作2 |
|---|---|---|
| PATH | P1 | P20 |
配線は、ユーザーが使いやすいD-sub25ピンコネクタを本体上部に設置。
ユーザー配管は、Φ4を2本、Φ6を2本設置しています。
またブレーキ解除スイッチの本体搭載により、コントローラの電源がOFFの場合でも、
ブレーキの解除可能になりました。(※1)
その他のアラーム表示等を搭載していますので、ロボット本体側で異常発生の確認が可能です。(※2)

プログラムは直交ロボットで定評のあるスーパーSEL言語を使用しています。
簡単で複雑な動作が可能ですのでロボット言語の知識がなくてもすぐにプログラムの作成が可能です。
Z軸(垂直軸)の押し付け機能によりワークの圧入やトルク制御が可能になりました。

動作範囲内に干渉チェックゾーンを最大10個まで設定出来ます。
チェックゾーンに入ると信号を出力しますので、低速テスト運動等にご使用下さい。

全機種17ビットのシリアルアブソリュートエンコーダを採用していますので、
原点復帰の必要がなく高精度な位置決めが可能です。
またアブソリュートリセットが必要な場合でも専用治具を使用することで簡単且つ正確に行うことができます。
IXシリーズのバリエーションは
上記6タイプを設定していますので幅広い用途に対応が可能です。




3015.jpg)
50_60_70_80.jpg)

