
คุณสมบัติพิเศษของผลิตภัณฑ์



(ข้อควรระวัง) ภาพด้านบนคือการประกอบในทิศทาง [1], และติดตั้งรางกระดูกงูมาพร้อมทุกแกน
สเปคพื้นฐาน
| ขอบเขตระยะเคลื่อนไหวสูงสุด | แกน X 800 มม. | แกน Z 300 มม. | แกน Y 200 มม. |
|---|---|---|---|
| น้ำหนักขนย้ายสูงสุด | 1 กก. | ||
| ไซเคิลไทม์มาตรฐาน | 2.55 วินาที | ||
| ความแม่นยำการทำซ้ำตำแหน่ง | ± 0.06 มม. | ||
ไซเคิลไทม์มาตรฐานคือเวลาที่ใช้ในการเคลื่อนที่ไป-กลับด้วยความเร็วสูงสุดภายใต้เงื่อนไขด้านล่างนี้

ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา |
|---|---|
| น้ำหนักขนย้ายสูงสุด | 1 กก. |
| ความแม่นยำการทำซ้ำตำแหน่ง | ±0.06 มม. |
| รายการ | เนื้อหา | |
|---|---|---|
| อุณหภูมิและความชื้นโดยรอบบริเวณที่ใช้งาน | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำควบแน่น) | |
| ระดับการป้องกัน | - | |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 | |
| มาตรฐานซึ่งรองรับในต่างประเทศ | ตามข้อกำหนด RoHS | |
| ชนิดเอนโค้ดเดอร์ | ไร้แบตเตอรี่แบบสัมบูรณ์ | |
| จำนวนพัลส์เอนโค้ดเดอร์ | แกน XYZ | 8192 พัลส์/รอบ |
| แกน RBT | 8192 พัลส์/รอบ | |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" | |
สเปคของแกนโครสร้าง
การทำงาน PTP แต่ละแกนสามารถทำงานด้วยความเร็วสูงสุดและความเร็วเร่ง-ลดสูงสุดได้
ค่าลิมิตสูงสุดของความเร็วและความเร็วเร่ง-ลดเมื่อทำงาน CP โปรดตั้งค่าโดยใช้ตัวเลขในหน้า 56 เป็นแนวทาง
แกน X
| รายการ | เนื้อหา | ||||||
|---|---|---|---|---|---|---|---|
| รุ่นของแกนโครสร้าง | RCP6-WSA14C-WA-56P-16-□-W (สเปคสไลเดอร์คู่) | ||||||
| ความเร็วสูงสุดแยกตาม ความเร็วเร่ง-ลดและสโตรค | ความเร็วเร่ง-ลด (G) | 0.1 | 0.2 | ||||
| สโตรค (มม.) | 150 - 600 | 650 | 700 | 750 | 800 | 150 - 800 | |
| ความเร็วสูงสุด (มม./วินาที) | 420 | 395 | 360 | 325 | 300 | 280 | |
| สโตรค | สโตรคต่ำสุด (มม.) | 150 | |||||
| สโตรคสูงสุด (มม.) | 800 | ||||||
| ระยะ Pitch ของสโตรค (มม.) | 50 | ||||||
| ชนิดมอเตอร์ | พัลส์มอเตอร์ ขนาด 56 □ | ||||||
แกน Z
| รายการ | เนื้อหา | |||
|---|---|---|---|---|
| รุ่นของแกนโครสร้าง | RCP6-WSA14R-WA-56P-4-□-B | |||
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วเร่ง-ลด (G) | 0.1 | 0.2 | 0.3 |
| ความเร็วสูงสุด (มม./วินาที) | 85 | 80 | ||
| สโตรค | สโตรคต่ำสุด (มม.) | 50 | ||
| สโตรคสูงสุด (มม.) | 300 | |||
| ระยะ Pitch ของสโตรค (มม.) | 50 | |||
| ชนิดมอเตอร์ | พัลส์มอเตอร์ ขนาด 56 □ | |||
แกน Y
| รายการ | เนื้อหา | |||
|---|---|---|---|---|
| รุ่นของแกนโครสร้าง | RCP6-WRA14R-WA-56P-16 | |||
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วเร่ง-ลด (G) | 0.3 | ||
| ความเร็วสูงสุด (มม./วินาที) | 560 | |||
| สโตรค | สโตรคต่ำสุด (มม.) | 100 | ||
| สโตรคสูงสุด (มม.) | 200 | |||
| ระยะ Pitch ของสโตรค (มม.) | 50 | |||
| ชนิดมอเตอร์ | พัลส์มอเตอร์ ขนาด 56 □ | |||
แกน R
| รายการ | เนื้อหา | |
|---|---|---|
| รุ่นของแกนโครสร้าง | RCP6-RTFML-WA-42P-30-360 | |
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วเร่ง-ลด (G) (ข้อควรระวัง 6) | 0.3 |
| ความเร็วสูงสุด (องศา/วินาที) | 800 | |
| ขอบเขตการเคลื่อนที่ (องศา) | ±180 | |
| แรงบิดสูงสุด (N・m) (ข้อควรระวัง 7) | 5.2 | |
| โมเมนท์แรงเฉื่อยที่ยอมรับได้ (kg・m2) (ข้อควรระวัง 7) | 0.08 | |
| ชนิดมอเตอร์ | พัลส์มอเตอร์ ขนาด 42 □ | |
(ข้อควรระวัง 6) 1G ≒ 9807 องศา/วินาที2
(ข้อควรระวัง 7) ขึ้นอยู่กับความเร็วและความเร็วเร่ง-ลด ดูรายละเอียดในหน้า 55
แกน BT
| รายการ | เนื้อหา | |||
|---|---|---|---|---|
| โครงสร้างแกน | แกน B (หมุนแกว่ง) | แกน T (หมุนแกว่ง) | ||
| รุ่นของแกนโครสร้าง | WU-S-WA | |||
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วเร่ง-ลด (G) (ข้อควรระวัง 8) | 0.3 | 0.3 | |
| ความเร็วสูงสุด (องศา/วินาที) | ทำงานแยกอิสระ | 750 | 1200 | |
| แกน B และแกน T ทำงานพร้อมกัน | 600 | 600 | ||
| ขอบเขตการเคลื่อนที่ (องศา) | ±100 | ±360 | ||
| ชนิดมอเตอร์ | พัลส์มอเตอร์ ขนาด 28 □ | |||
| แรงบิดสูงสุด (N・m) (ข้อควรระวัง 9) | 0.65 | 0.65 | ||
| โมเมนท์แรงเฉื่อยที่ยอมรับได้ (kg・m2) (ข้อควรระวัง 9) | 0.0085 | 0.0075 | ||
(ข้อควรระวัง 8) 1G ≒ 9807 องศา/วินาที2
(ข้อควรระวัง 9) ขึ้นอยู่กับความเร็วและความเร็วเร่ง-ลด ดูรายละเอียดในหน้า 55
(ข้อควรระวัง) แกน BT มีเบรกเป็นอุปกรณ์มาตรฐาน
ทิศทางการประกอบร่วม

ทิศทางการทำงานของแกนหมุน (แกน R) / แกนข้อหมุน (แกน B แกน T)

คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกน ที่เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| RSEL-SXZCZ (สำหรับ CRS) |  | 8 | DC24V | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 |
(ข้อควรระวัง) สำหรับสัญลักษณ์ตัวย่อของเน็ตเวิร์ค เช่น DV และ CC โปรดดูที่หน้า 58
ข้อควรระวังในการเลือก
| (1) ไซเคิลไทม์เป็นค่าอ้างอิง เวลาการทำงานอาจนานกว่าไซเคิลไทม์ข้างต้น ทั้งนี้ขึ้นอยู่กับสโตรคและรูปแบบการทำงาน (2) ตั้งค่าเอาต์พุตสูงของยูนิตไดรเวอร์ RSEL โดยเลือก "เปิดใช้งาน" (3) ความแม่นยำในการทำซ้ำตำแหน่งเป็นไปตาม "เงื่อนไขการทดสอบประสิทธิภาพหุ่นยนต์อุตสาหกรรม JIS B 8432" |
มาตรฐานต่างประเทศ

ภาพร่างแสดงขนาด

*1 รางกระดูกงูอาจบวม หรืออาจมีขนาดใหญ่กว่าที่ระบุเล็กน้อย
(ข้อควรระวัง) จุดประกอบในดรอว์อิ้งจะกลายเป็นจุดเริ่มต้น
(ข้อควรระวัง) ดรอว์อิ้งด้านล่างนี้แสดงถึงกรณีที่ ทิศทางการประกอบร่วม "1", การเดินสายที่ 1, การเดินสายที่ 2 และการเดินสายที่ 3 ทั้งหมดมีรางกระดูกงูมาด้วย
สำหรับดรอว์อิ้งอื่น ๆ โปรดตรวจสอบที่โฮมเพจ

ขนาดแยกตามสโตรค
| สโตรคแกน X | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| B | 537 | 587 | 637 | 687 | 737 | 787 | 837 | 887 | 937 | 987 | 1037 | 1087 | 1137 | 1187 |
| F | 47 | 97 | 47 | 97 | 47 | 97 | 47 | 97 | 47 | 97 | 47 | 97 | 47 | 97 |
| G | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | 7 | 7 | 8 | 8 | 9 | 9 |
| H | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 | 20 | 22 | 22 | 24 | 24 |
| J | 398 | 448 | 498 | 548 | 598 | 648 | 698 | 748 | 798 | 848 | 898 | 948 | 998 | 1048 |
| K | 271 | 296 | 321 | 346 | 371 | 396 | 421 | 446 | 471 | 496 | 521 | 546 | 571 | 596 |
ขนาดแยกตามสโตรค
| สโตรคแกน Z | 50 | 100 | 150 | 200 | 250 | 300 |
|---|---|---|---|---|---|---|
| T | 155 | 132 | 111 | 88 | 35 | 29 |
ขนาดแยกตามสโตรค
| สโตรคแกน Y | 100 | 150 | 200 |
|---|---|---|---|
| M | 120 | 170 | 220 |
ขนาดแยกตามสโตรค
| ขนาดของ รางกระดูกงู | CT | CTM | CTL | CTXL |
|---|---|---|---|---|
| Q | - | 110 | 127 | 147 |
| S | 110 | 121 | - | - |
(ข้อควรระวัง) ขนาดมิติของ Q และ S จะแตกต่างกันไปตามขนาดของสายเคเบิล
น้ำหนักตัวเครื่อง (Body) แยกตามสโตรค
| สโตรคแกน X (มม.) สโตรคแกน Z (มม.) | 150 - 300 | 350 - 600 | 650 - 800 |
|---|---|---|---|
| 50 - 150 | 43 - 47 | 46 - 53 | 49 - 55 |
| 200 - 300 | 47 - 53 | 49 - 56 | 53 - 59 |
(หน่วยเป็น กก.)
(ข้อควรระวัง) วิธีการคำนวณน้ำหนักตัวเครื่อง (Body) โดยละเอียด โปรดดูจากคู่มือการใช้งาน
ภาพตัดขวางของรางกระดูกงู
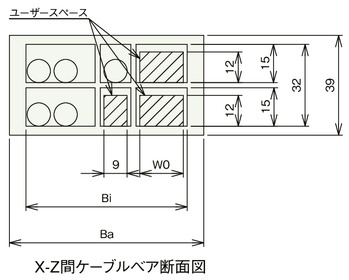


| ขนาดของรางกระดูกงู | CT | CTM | CTL | CTXL | |
|---|---|---|---|---|---|
| รุ่นของรางกระดูกงูที่ใช้ | B17.4.075.0 | B17.5.075.0 | B17.6.075.0 | B17.7.075.0 | |
| Ba | 60.5 | 76 | 93 | 113 | |
| Bi | 50 | 63 | 80 | 100 | |
| W0 | 9 | 17 | 34 | 54 | |