
รูปแบบการติดตั้ง


ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | |
|---|---|---|
| แรงบิดสูงสุด (N・m) (หมายเหตุ 3) | 25 | |
| แรงบิดสูงสุดชั่วขณะ (N・m) | 75 | |
| ความเร็ว/ความเร็วเร่ง-ลด (หมายเหตุ 4) | ความเร็วรอบ (องศา/วินาที) | 800 |
| ความเร็วสูงสุด (องศา/วินาที) | 1440 | |
| อัตราเร่งความเร็วสูงสุดและต่ำสุด (G) | 9.99 | |
| เบรก | ข้อมูลจำเพาะของเบรก | เบรกแม่เหล็กไฟฟ้าชนิด NON-EXCITATION OPERATION |
| แรงบิดในการโฮลด์เบรก (N・m) | 50 | |
| ขอบเขตการทำงาน | ประเภทดัชนี (องศา) | 0 - 359.99 |
| ประเภทแอ็บโซลูท (สัมบูรณ์) มัลติโรเทชั่น (องศา) (หมายเหตุ 5) | ±9999 | |
(หมายเหตุ 3) ลักษณะเฉพาะเมื่อติดตั้งบนแผงระบายความร้อนที่บริษัทกำหนด สำหรับรายละเอียด กรุณาดูหน้า 1-312
(หมายเหตุ 4) 1G≒9807 องศา/วินาที2
(หมายเหตุ 5) เมื่อเชื่อมต่อ SCON และประเภทความละเอียดสูง (20 บิต) แล้ว ค่าที่ได้จะเป็น ± 2520
| รายการ | เนื้อหา | |
|---|---|---|
| รูปแบบการขับเคลื่อน | ไดเร็คไดรฟ | |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | 17 บิต | ±19.8 วินาที (±0.0055 องศา) |
| 20 บิต | ±3.7 วินาที (±0.00103 องศา) | |
| ความถูกต้องแม่นยำในการจัดทำดัชนี (หมายเหตุ 6) | 17 บิต | ±45 วินาที (±0.01249 องศา) |
| 20 บิต | ±30 วินาที (±0.00833 องศา) | |
| วิธีการย้อนกลับจุดเริ่มต้น | วิธีการตรวจหาจุดเริ่มต้นของเอ็นโค้ดเดอร์ | |
| ความแม่นยำในการกลับจุดเริ่มต้น | 17 บิต | ±19.8 วินาที (±0.0055 องศา) |
| 20 บิต | ±3.7 วินาที (±0.00103 องศา) | |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | 17 บิต | น้อยกว่าหรือเท่ากับ 39.6 วินาที (0.011 องศา) |
| 20 บิต | น้อยกว่าหรือเท่ากับ 7.4 วินาที (0.00206 องศา) | |
| แรงขับโหลดที่ยอมรับได้ | ทิศทางที่เป็นบวก | 3100N |
| ทิศทางย้อนกลับ | 250N | |
| โมเมนต์ของโหลดที่ยอมรับได้ | 80N・m | |
| แรงเฉื่อยโรเตอร์ | 0.0092kg・m2 | |
| โมเมนต์ความเฉื่อยที่ยอมรับได้ | 1.8kg・m2 | |
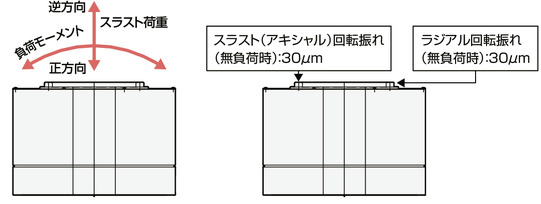
| การเบี่ยงเบนของการหมุนในแนวรัศมี | 0.03 มม. | |
| การเบี่ยงเบนของแรงขับหมุน | 0.03 มม. | |
| วัสดุฐาน | อลูมิเนียม พ่นสีด้านข้าง | |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40 ℃, ความชื้นไม่เกิน 20-85% RH (ไม่มีการควบแน่นเป็นหยดน้ำ) | |
| ระดับการป้องกัน | IP40 | |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 | |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS | |
| เอาท์พุทมอเตอร์ | 600W | |
| ชนิดเอนโค้ดเดอร์ | แบบสัมบูรณ์ | |
| จำนวนพัลส์เอนโค้ดเดอร์ | 17 บิต | 131,072 พัลส์/รอบ |
| 20 บิต | 1,048,576 พัลส์/รอบ | |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" | |
(หมายเหตุ 6) ความแม่นยำในการกำหนดตำแหน่งจะสอดคล้องในกรณีเชื่อมต่อกับ SCON-CB/RCON-SC
ทิศทางโมเม้นต์แบบโรตารีและการเบี่ยงเบนของเพลาเอาท์พุต
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกนที่ เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| RCON |  | 16 (ML3, SSN, ECM คือ 8) | DC24V สามเฟส AC200V | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3, SSN, ECM ไม่มีข้อมูลตำแหน่ง) |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
| SCON-CB/CGB |  | 1 | เฟสเดี่ยว AC200V | ● | ● | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | ● | 512 (สเปคเน็ตเวิร์คคือ 768) |
| SCON2-CG |  | 1 | ● | ● | - | ● | ● | ● | - | - | - | ● | ● | ● | ● | - | - | 384 | |
| XSEL-P/Q |  | 6 | เทียบเท่า AC200V สามเฟส AC200V | - | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
| XSEL-RA/SA |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | - | - | - | 55000 (แตกต่างกันไปตามแต่ละรุ่น) | |
(หมายเหตุ) ดูหน้า 8-15 สำหรับตัวย่อเครือข่าย เช่น DV และ CC
(หมายเหตุ) ข้อควรระวังในการเลือกคอนโทรลเลอร์ กรุณาดูที่ 6-42
(หมายเหตุ) ประเภทความละเอียดสูงไม่สามารถเชื่อมต่อกับ XSEL-P / Q. ได้
(ข้อควรระวัง) แอคทูเอเตอร์ของแอ็บโซลูทมัลติโรเทชั่นไม่สามารถเชื่อมต่อกับ RCON-SC ได้ ในการเชื่อมต่อกับยูนิต R (RCON/RSEL) จำเป็นต้องมียูนิตขยาย (RCON-EXT) และ SCON หรือ SCON2 แยกต่างหาก
(หมายเหตุ) สำหรับ EC, ML3, SSN และ ECM ของสเปคเครือข่ายการเคลื่อนไหว โหมดดัชนีแกนหมุนจะไม่พร้อมใช้งาน
(หมายเหตุ) ML3 ของ SCON2 และ EC จะเป็นสเปครีโมท I/O กรณีที่รุ่นคอนโทรลเลอร์ไม่มีตัวเลือกฟังก์ชัน กรณีที่เลือก "M" เป็นตัวเลือกฟังก์ชัน จะเป็นสเปคของโมชั่นเน็ตเวิร์ก
มาตรฐานต่างประเทศ

ข้อควรระวังในการเลือก
| (1) โมเมนต์บรรทุกที่ยอมรับและน้ำหนักแรงขับที่ยอมรับใน "สเปคหลัก" คือ ทำงานได้ 8 ชั่วโมงต่อวันที่ความเร็วการหมุนที่กำหนด และมีอายุการใช้งาน 5 ปีในกรณีของทำงานได้อย่างราบรื่นโดยไม่มีแรงกระแทก (2) ในระหว่างการควบคุมแถวพัลส์และการควบคุมการเคลื่อนที่ของ MECHATROLINK-Ⅲ/EtherCAT/SSCNET จะไม่สามารถใช้ประเภท Index Absolute Type ได้ (3) โปรดทราบว่าเมื่อใช้ XSEL กับประเภทดัชนีสัมบูรณ์ มีเพียงการควบคุมทางลัดเท่านั้นที่สามารถทำได้ (4) เบรกมีไว้สำหรับจับ เมื่อใช้ในการเบรก กรุณาใช้ความระมัดระวังเนื่องจากอาจมีความเสี่ยงที่จะเกิดการขัดข้องได้ (5) ประเภทความละเอียดสูงไม่สามารถเชื่อมต่อกับ XSEL-P/Q ได้ (6) โปรดระมัดระวังตามรูปแบบการติดตั้ง สำหรับรายละเอียด กรุณาดูหน้า 1-312 (7) เพื่อให้ทำงานได้อย่างเหมาะสมที่สุด จำเป็นต้องปรับพารามิเตอร์เกนตามความเฉื่อยของโหลดที่จะโหลดเมื่อสตาร์ทครั้งแรก สำหรับรายละเอียด กรุณาดูคู่มือการใช้งาน DDA (MJ3756) (8) สำหรับวิธีการเลือก กรุณาดูหน้า 6-41 (9) มีข้อควรระวัง เช่น ประเภทการทำงาน จำนวนตัวต้านทานที่จำเป็นในการเริ่มใหม่ และจำนวนแกนที่เชื่อมต่อสูงสุด สำหรับรายละเอียด กรุณาดูที่ 6-42 |
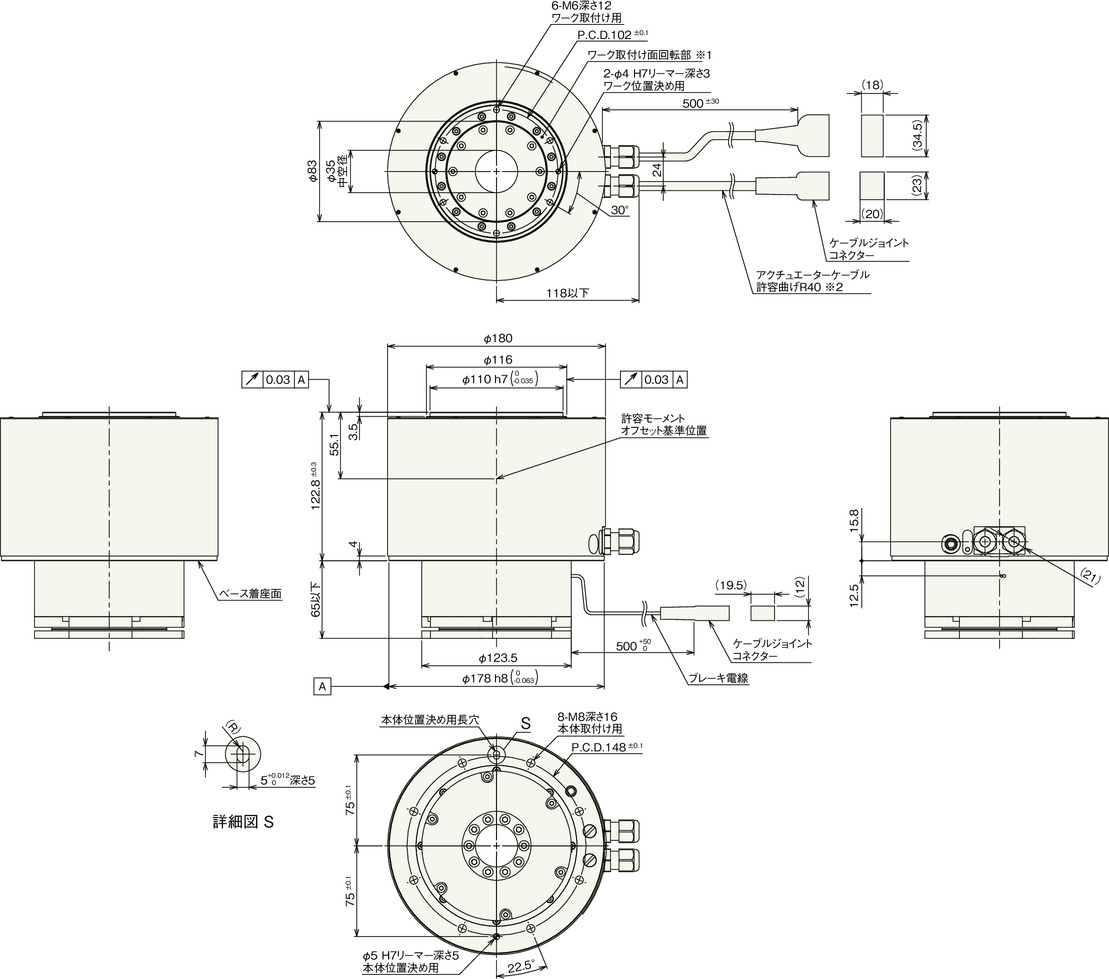
ภาพร่างแสดงขนาด

การถอดสายด้านข้าง (สัญลักษณ์ตัวเลือก A1)
*1 ตำแหน่งเริ่มต้นของชิ้นส่วนที่หมุนบนพื้นผิวยึดชิ้นงานในมุมมองด้านบนให้เป็นตำแหน่งเริ่มต้น สติ๊กเกอร์เครื่องหมายตำแหน่งเริ่มต้นจะติดอยู่ที่ตำแหน่งเริ่มต้นซึ่งเป็นเครื่องหมายที่ตรงกัน
*2 สายเคเบิลแอชูเอเตอร์คือสายเคเบิลของหุ่นยนต์
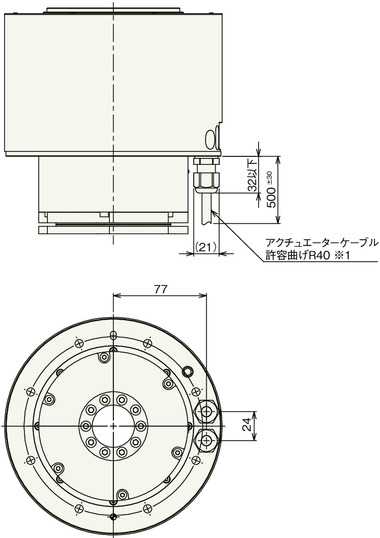
การถอดสายเคเบิลด้านล่าง (สัญลักษณ์ตัวเลือก A0)
*1 สายเคเบิลแอชูเอเตอร์คือสายเคเบิลของหุ่นยนต์
น้ำหนักมวลสาร
| รายการ | เนื้อหา |
|---|---|
| น้ำหนักมวลสาร | 17.4 กก. |
วิธีการย้อนกลับตำแหน่งเริ่มต้นและทิศทางการหมุนไปข้างหน้า
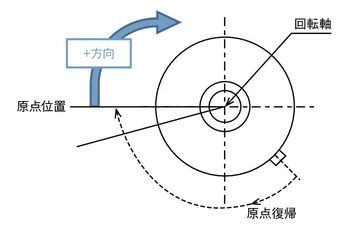
เมื่อมองจากด้านบนของส่วนที่หมุน การหมุนตามเข็มนาฬิกาจะเป็นทิศทาง +
การย้อนกลับตำแหน่งเริ่มต้นจะหมุนตามเข็มนาฬิกา
ตรวจจับตำแหน่งเริ่มต้นและหยุด
คุณสมบัติของประเภทการทำงานตามคอนโทรลเลอร์
| ชนิดคอนโทรลเลอร์ | SCON-CB | RCON | RSEL | XSEL-P/Q | XSEL-RA/SA | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ประเภทการทำงาน | ดัชนีสัมบูรณ์ | แอปโซลูท (แบบสัมบูรณ์) มัลติโรเทชั่น | ดัชนีสัมบูรณ์ | แอปโซลูท (แบบสัมบูรณ์) มัลติโรเทชั่น | ดัชนีสัมบูรณ์ | แอปโซลูท (แบบสัมบูรณ์) มัลติโรเทชั่น | ดัชนีสัมบูรณ์ | แอปโซลูท (แบบสัมบูรณ์) มัลติโรเทชั่น | ดัชนีสัมบูรณ์ | แอปโซลูท (แบบสัมบูรณ์) มัลติโรเทชั่น | |||||||||||
| ความละเอียด | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | มาตรฐาน (17 บิต) | ความละเอียดสูง (20 บิต) | |
| ขอบเขตการทำงานสูงสุด | 0-359.999 องศา | ±9999 องศา | ±2520 องศา | 0-359.999 องศา | ― | 0-359.999 องศา | ― | 0~ 359.999 องศา | ― | ±9999 องศา | ― | 0-359.999 องศา | ±9999 องศา | ||||||||
| ปริมาณการเคลื่อนไหวสูงสุด ของคำสั่งการเคลื่อนไหวหนึ่งคำสั่ง | 360 องศา | อยู่ในขอบเขตการเคลื่อนไหวตามด้านบน | 360 องศา | ― | 360 องศา | ― | 180 องศา (หมายเหตุ 8) | ― | อยู่ในขอบเขตการเคลื่อนไหวตามด้านบน | ― | 180 องศา (หมายเหตุ 8) | อยู่ในขอบเขตการเคลื่อนไหวตามด้านบน | |||||||||
| การดำเนินการหมุนไม่สิ้นสุด (หมายเหตุ 7) | สามารถ | ไม่สามารถ | สามารถ | ― | สามารถ | ― | สามารถได้ (หมายเหตุ 9) | ― | ไม่สามารถ | ― | สามารถได้ (หมายเหตุ 9) | ไม่สามารถ | |||||||||
| การย้อนกลับตำแหน่งเริ่มต้นระหว่าง การทำงานเริ่มต้น/เปลี่ยนแบตเตอรี่ | ไม่จำเป็น | จำเป็น | ไม่จำเป็น | ― | ไม่จำเป็น | ― | ไม่จำเป็น | ― | จำเป็น | ― | ไม่จำเป็น | จำเป็น | |||||||||
| แอบโซลูทแบตเตอรี่ (แบบสัมบูรณ์) | ไม่จำเป็น | จำเป็น | ไม่จำเป็น | ― | ไม่จำเป็น | ― | ไม่จำเป็น | ― | จำเป็น | ― | ไม่จำเป็น | จำเป็น | |||||||||
| การควบคุมพัลส์เทรน | ไม่สามารถ | สามารถ | ไม่สามารถ | ― | ไม่สามารถ | ― | ไม่สามารถ | ― | ไม่สามารถ | ― | ไม่สามารถ | ||||||||||
| รองรับโมชั่นเน็ตเวิร์ค | ไม่สามารถ | สามารถ | ไม่สามารถ | ― | ไม่สามารถ | ― | ไม่สามารถ | ― | ไม่สามารถ | ― | ไม่สามารถ | ||||||||||
| การดำเนินการแก้ไข | ไม่สามารถ | ไม่สามารถ | ― | สามารถ | ― | สามารถ | ― | สามารถ | ― | สามารถ | |||||||||||
| การทำงานแบบซิงโครไนซ์ | ไม่สามารถ | ไม่สามารถ | ― | ไม่สามารถ | ― | ไม่สามารถ | ― | สามารถ | ― | ไม่สามารถ | สามารถ | ||||||||||
ผลิตภัณฑ์นี้รองรับประเภทการทำงานและความละเอียดที่แตกต่างกันขึ้นอยู่กับคอนโทรลเลอร์ที่จะเชื่อมต่อ โปรดตรวจสอบเนื้อหาที่คอนโทรลเลอร์แต่ละตัวสามารถรองรับได้ก่อนใช้งาน
(หมายเหตุ 7) รายละเอียดเกี่ยวกับการดำเนินการหมุนต่อเนื่องกรุณาดูใน 6-38
(หมายเหตุ 8) สำหรับประเภท Index Absolute Type XSEL เมื่อเคลื่อนที่มากกว่า 180 องศาจากตำแหน่งปัจจุบัน จะหมุนไปในทิศทางที่มีการเคลื่อนไหวน้อยที่สุดและเคลื่อนที่ไปยังตำแหน่งเป้าหมาย ดังนั้น โปรดทราบว่าทิศทางการหมุนจะเปลี่ยนไปตามตำแหน่งปัจจุบันและปริมาณการเคลื่อนไหว
(หมายเหตุ 9) ประเภทดัชนีสัมบูรณ์คือ แม้จะสามารถหมุนไปในทิศทางเดียวกันได้อย่างต่อเนื่อง แต่ XSEL สามารถเคลื่อนที่ได้ครั้งละ 180 องศาเท่านั้น จึงไม่เหมือนกับมอเตอร์ตรงที่ไม่สามารถหมุนอย่างต่อเนื่องไปในทิศทางเดียวกันโดยไม่หยุด
มาตรฐานระยะเวลาการเคลื่อนที่
| ขีดจำกัดล่างของแรงเฉื่อยของน้ำหนักบรรทุก (โหลด) (kg・m2) | 0 | 0.005 | 0.01 | 0.02 | 0.02 | 0.03 | 0.04 | 0.06 | 0.08 | 0.1 | 0.15 | 0.2 | 0.3 | 0.4 | 0.6 | 0.8 | 1 | 1.2 | 1.4 |
| ขีดจำกัดสูงสุดของแรงเฉื่อยของน้ำหนักบรรทุก (โหลด) (kg・m2) | 0.005 | 0.01 | 0.015 | 0.02 | 0.03 | 0.04 | 0.06 | 0.08 | 0.1 | 0.15 | 0.2 | 0.3 | 0.4 | 0.6 | 0.8 | 1 | 1.2 | 1.4 | 1.8 |
| เวลาเคลื่อนที่ 45 องศา (s) | 0.098 | 0.096 | 0.096 | 0.097 | 0.099 | 0.104 | 0.113 | 0.12 | 0.126 | 0.14 | 0.157 | 0.207 | 0.257 | 0.352 | 0.447 | 0.53 | 0.629 | 0.795 | 0.875 |
| เวลาเคลื่อนที่ 90 องศา (s) | 0.129 | 0.128 | 0.127 | 0.128 | 0.131 | 0.136 | 0.144 | 0.153 | 0.163 | 0.184 | 0.208 | 0.268 | 0.329 | 0.44 | 0.549 | 0.646 | 0.758 | 0.941 | 1.035 |
| เวลาเคลื่อนที่ 180 องศา (s) | 0.192 | 0.19 | 0.19 | 0.191 | 0.193 | 0.199 | 0.207 | 0.215 | 0.225 | 0.249 | 0.279 | 0.354 | 0.428 | 0.562 | 0.692 | 0.806 | 0.933 | 1.133 | 1.257 |
| เวลาเคลื่อนที่ 270 องศา (s) | 0.254 | 0.252 | 0.252 | 0.253 | 0.256 | 0.262 | 0.27 | 0.278 | 0.288 | 0.312 | 0.341 | 0.42 | 0.504 | 0.655 | 0.8 | 0.925 | 1.064 | 1.274 | 1.415 |
ระยะเวลาการเคลื่อนที่แปรผันตามความเฉื่อยของน้ำหนักบรรทุก (โหลด) โปรดตรวจสอบค่ามาตรฐานระยะเวลาการเคลื่อนที่จากตารางด้านล่าง
(หมายเหตุ) ตัวเลขในตารางเป็นเพียงค่ามาตรฐานและไม่รับประกันระยะเวลาการเคลื่อนที่
(หมายเหตุ) เวลาที่ระบุในตารางเป็นเวลาตั้งแต่ได้รับคำสั่งเคลื่อนไหวจนบรรจบกันที่ความกว้างของตำแหน่ง 0.028 องศา (ประมาณ 100 องศา/วินาที)