
คุณสมบัติพิเศษของผลิตภัณฑ์




รูปแบบการติดตั้ง


ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | ||
|---|---|---|---|
| อัตราส่วนการลดความเร็ว | M | L | |
| Lead | Ball screw lead (มม.) | 2.5 | 2.5 |
| อัตราส่วนการลดความเร็วของ Pulley | 1.05 | 1.64 | |
| การเคลื่อนที่แบบจับยึด | แรงจับยึดสูงสุด (N) (ทั้งสองด้าน) | 125 | 325 |
| ความเร็วเมื่อจับยึด (มม./วินาที) (ด้านเดียว) | 20 | 20 | |
| การเคลื่อนที่แบบเข้าใกล้ | ความเร็วสูงสุด (มม. / วินาที) (ด้านเดียว) | 175 | 107 |
| ความเร็วต่ำสุด (มม. / วินาที) (ด้านเดียว) | 10 | 10 | |
| พิกัดความเร็วเร่ง/ลด (G) (ด้านเดียว) | 0.3 | 0.3 | |
| ความเร็วเร่ง/ลดสูงสุด (G) (ด้านเดียว) | 0.3 | 0.3 | |
| เบรก | ข้อมูลจำเพาะของเบรก | เบรกแม่เหล็กไฟฟ้าชนิด NON-EXCITATION OPERATION | |
| แรงยึดเบรก (N) (ทั้งสองด้าน) | 131 | 206 | |
| สโตรค | สโตรคต่ำสุด (มม.) (ด้านเดียว)\ | 25 | 25 |
| สโตรคสูงสุด (มม.) (ด้านเดียว) | 100 | 100 | |
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | บอลสกรูซ้ายขวา φ8มม. แบบรีด C10 |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.02 มม. |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | - (ไม่สามารถแสดงได้ เนื่องจากเป็นฟังก์ชั่นกำหนดตำแหน่ง 2 จุด ) |
| Backlash (ด้านเดียว) | ไม่เกิน 0.03 มม. |
| ฐาน | วัสดุสำหรับอัดขึ้นรูปอะลูมิเนียมโดยเฉพาะ (เทียบเท่า A6063SS-T5) ชุบเคลือบผิวอะลูมิเนียมดำ |
| ลิเนียร์ไกด์ | ชนิดหมุนเวียนเคลื่อนที่เชิงเส้นแบบไม่จำกัด |
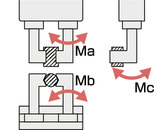
| โมเมนต์ที่ยอมรับได้แบบสถิต | Ma : 9.9 N・m |
| Mb : 14.2 N・m | |
| Mc : 17.2 N・m | |
| น้ำหนักที่ยอมรับในทิศทางแนวตั้ง (หมายเหตุ 7) | 810N |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำควบแน่น) |
| ระดับการป้องกัน | IP20 |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS |
| ชนิดมอเตอร์ | พัลส์มอเตอร์ (□28) (ความจุไฟฟ้า: สูงสุด 2A) |
| ชนิดเอนโค้ดเดอร์ | ชนิดเพิ่มค่า / ชนิดไร้แบตเตอรี่สัมบูรณ์ |
| จำนวนพัลส์เอนโค้ดเดอร์ | 16384 pulse/rev |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" |
(หมายเหตุ 7) กรณีที่ใช้ด้วยน้ำหนักที่เกินค่าข้างต้น อาจเป็นสาเหตุทำให้อายุการใช้งานสั้นลงและทำให้เกิดความเสียหายได้
ทิศทางโมเมนต์รุ่นสไลด์
คอนโทรลเลอร์ที่ใช้ได้
(หมายเหตุ) ซีรี่ส์ EC จะติดตั้งคอนโทรลเลอร์ไว้ภายใน สำหรับรายละเอียดของคอนโทรลเลอร์ในตัว กรุณาดูหน้า 2-769
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
| (1) ความเร็วในการเปิด/ปิดสูงสุดของ "สเปคหลัก" ระบุค่าความเร็วในการทำงานของด้านใดด้านหนึ่ง ความเร็วในการทำงานสัมพัทธ์เพิ่มขึ้นเป็นสองเท่า (2) แรงจับยึดสูงสุดของ "สเปคหลัก" คือค่ารวมของแรงจับยึดของกรงเล็บ (Finger) ทั้งสองเมื่อระยะจุดจับยึดเป็น 0 และระยะยื่น (Overhang) เป็น 0 สำหรับน้ำหนักของชิ้นงานที่ขนย้ายได้จริง โปรดดูที่ "การตรวจสอบระยะห่างของจุดจับยึด" (3) ต้องแน่ใจว่ามีการใช้การกดเมื่อจับยึดชิ้นงาน (4) ต้องจำกัด Duty cycle ตามอุณหภูมิแวดล้อมในการทำงาน สำหรับรายละเอียด กรุณาดูหน้า 1-326 (5) โปรดระมัดระวังตามรูปแบบการติดตั้ง กรุณาดูรายละเอียดหน้า 1-307 (6) รุ่นนี้ไม่มีกลไก Self-log กรณีที่จำเป็นต้องใช้กลไกเบรก กรุณาเลือกอุปกรณ์เสริมเบรก ด้วยการใช้ฟังก์ชันปิดเซอร์โวอัตโนมัติ จะสามารถรักษาแรงยึดจับได้หลังจากปิดเครื่องแล้ว จนกว่าจะมีการใช้เบรก (แต่ไม่รับประกันว่าจะไม่เกิดความผิดพลาด ) |
ภาพร่างแสดงขนาด

ST: สโตรค
M.E.: จุดสิ้นสุดเมคานิคัล
S.E.: จุดสิ้นสุดสโตรค
*1 กรณีที่กลับไปยังจุดเริ่มต้น ฟิงเกอร์ทั้งสองจะเคลื่อนไปจนถึง M.E. กรุณาระมัดระวังไม่ให้รบกวนวัตถุโดยรอบ
*2 ฟิงเกอร์ทั้งสองเคลื่อนไปในทิศทางตรงกันข้ามพร้อมกัน
(หมายเหตุ) โดยมาตรฐานแล้วด้านเปิดคือจุดเริ่มต้น กรุณาระบุตัวเลือกเสริม (รุ่น: NM) หากต้องการให้เริ่มต้นการใช้งานจากการปิด
(หมายเหตุ) กรุณายึดเคเบิลให้แน่นเพื่อไม่ให้ส่วนฐานของเคเบิลขยับ
ทิศทางทางออกของเคเบิ้ล (ตัวเลือกเสริม) สามารถเปลี่ยนได้โดยการเปลี่ยนทิศทางของเคเบิ้ลบ็อก
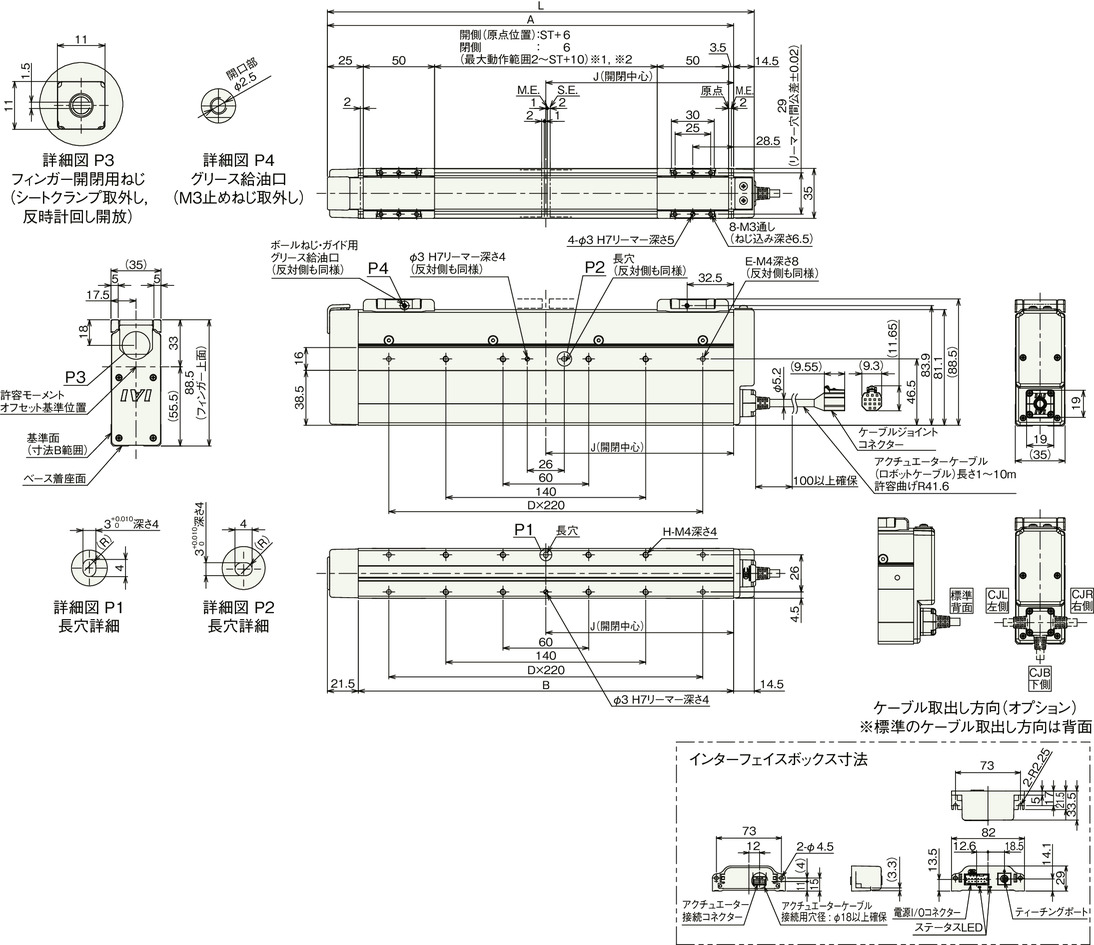
ขนาดแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 |
|---|---|---|---|---|
| L | 199 | 249 | 299 | 349 |
| A | 184.5 | 234.5 | 284.5 | 334.5 |
| B | 163 | 213 | 263 | 313 |
| D | 0 | 0 | 1 | 1 |
| E | 4 | 4 | 6 | 6 |
| H | 8 | 8 | 12 | 12 |
| J | 81.5 | 106.5 | 131.5 | 156.5 |
น้ำหนักแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 | ||
|---|---|---|---|---|---|---|
| น้ำหนัก (กก.) | GRST3M | ไม่มีเบรก | 1.0 | 1.1 | 1.3 | 1.4 |
| มีเบรก | 1.2 | 1.3 | 1.5 | 1.6 | ||
| GRST3L | ไม่มีเบรก | 1.1 | 1.2 | 1.3 | 1.5 | |
| มีเบรก | 1.3 | 1.4 | 1.5 | 1.7 | ||
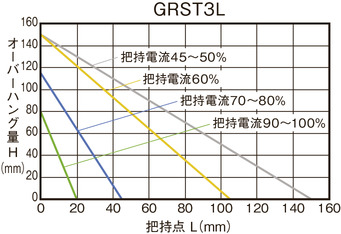
ตรวจสอบระยะห่างของจุดจับยึด
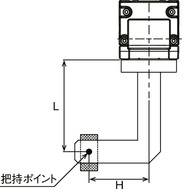
โปรดใช้งานโดยกำหนดะยะห่าง (L, H) จากด้านที่ติดตั้งกรงจับ (Finger) ไปยังจุดจับยึดให้อยู่ในช่วงของกราฟ
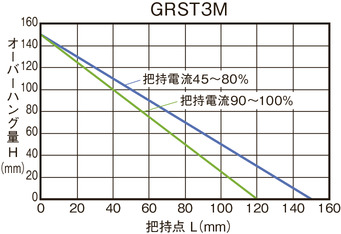
(หมายเหตุ) หากเกินช่วงที่จำกัดไว้นี้ โมเมนต์ที่มากเกินจะกระทบกับจุดแกว่งของกรงจับ (Finger) และกลไกภายใน ซึ่งอาจส่งผลเสียต่ออายุการใช้งาน
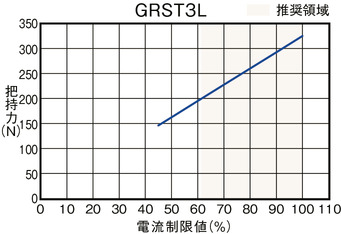
แรงจับยึด
■ แผนภาพแสดงความสัมพันธ์ระหว่างแรงจับยึดกับค่าขีดจำกัดของกระแส
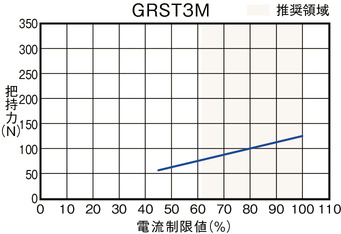
(หมายเหตุ) แสดงค่ารวมของกรงจับ (Finger) ทั้งสองเมื่อระยะจุดจับยึด (L, H) เป็น 0
(หมายเหตุ) เป็นเพียงตัวเลขโดยประมาณ มีความผันแปรประมาณ 0-60% โดยเฉพาะอย่างยิ่ง เมื่อมีการกำหนดค่าขีดจำกัดของกระแสเกินช่วงที่แนะนำ (ส่วนที่ระบายสีในกราฟ) จะยิ่งทำให้เกิดความผันผวนมากขึ้น
(หมายเหตุ) กรณีที่จับ (ดัน) ความเร็วคือ 20 มม./วินาที หาก Approach Speed น้อยกว่าหรือเท่ากับ 20 มม./วินาที การจับจะดำเนินการที่ Approach Speed นั้นๆ
■ ระยะจุดจับยึดและแรงจับโดยประมาณ
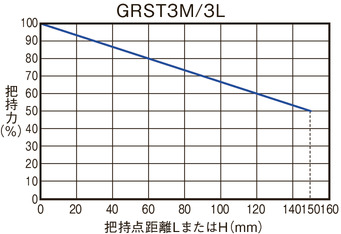
(หมายเหตุ) แสดงแรงจับยึดซึ่งขึ้นอยู่กับตำแหน่งที่ขยายเมื่อแรงจับสูงสุดคือ 100% ผลลัพธ์อาจแตกต่างกันไปขึ้นอยู่กับความแข็งแกร่งของอุปกรณ์ติดตั้งที่มากับกรงจับ (Finger)