
คุณสมบัติพิเศษของผลิตภัณฑ์




รูปแบบการติดตั้ง



ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | |
|---|---|---|
| ลวดนำ (มม.) (หมายเหตุ 6) | เทียบเท่า 2.53 | |
| การเคลื่อนที่แบบจับยึด | แรงจับยึดสูงสุด (N) (รวม 3 กรงจับ) | 630 |
| ความเร็วในการเคลื่อนที่แบบจับยึด (มม./วินาที) (ต่อ 1 กรงจับ) | 20 | |
| การเคลื่อนที่แบบเข้าใกล้ | ความเร็วสูงสุด (มม./วินาที) (ต่อ 1 กรงจับ) | 99 |
| ความเร็วต่ำสุด (มม./วินาที) (ต่อ 1 กรงจับ) | 2 | |
| อัตราการเร่งและการชะลอความเร็ว (G) (ต่อ 1 กรงจับ) | 0.3 | |
| การเร่งและการชะลอความเร็วสูงสุด (G) (ต่อ 1 กรงจับ) | 0.3 | |
| เบรก | ข้อมูลจำเพาะของเบรก | - |
| แรงยึดเบรก (N) | - | |
| ระยะชัก (ต่อ 1 กรงจับ) | 15 | |
(หมายเหตุ 6) แสดงการคำนวณเส้นผ่านศูนย์กลางของการเคลื่อนที่ของกรงจับต่อการหมุนมอเตอร์ 1 รอบ
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | สายพานไทม์มิ่ง+เฟืองไฮปอยด์+ลูกเบี้ยวร่อง |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.02 มม. |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | (แสดงสัญลักษณ์ไม่ได้เพราะไม่มีฟังก์ชั่นกำหนดตำแหน่งระหว่างจุด 2 จุด) |
| Backlash (ด้านเดียว) | น้อยกว่า 0.3 มม. |
| ลิเนียร์ไกด์ | ไกด์แบบจำกัด |
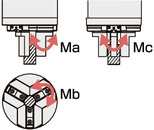
| โมเมนต์ดัดแบบสถิตที่รองรับได้ (ต่อ 1 กรงจับ) | Ma : 36.5 N・m |
| Mb : 36.5 N・m | |
| Mc : 49.6 N・m | |
| น้ำหนักบรรทุกแนวดิ่งที่รองรับได้ (หมายเหตุ 7) (ต่อ 1 กรงจับ) | 763N |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำควบแน่น) |
| ระดับการป้องกัน | IP20 |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS |
| ชนิดมอเตอร์ | พัลส์มอเตอร์ (□42) (ความจุไฟฟ้า: สูงสุด 4.2A) |
| ชนิดเอนโค้ดเดอร์ | ชนิดเพิ่มค่า / ชนิดไร้แบตเตอรี่สัมบูรณ์ |
| จำนวนพัลส์เอนโค้ดเดอร์ | 800 pulse/rev |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" |
(หมายเหตุ 7) กรณีที่ใช้ด้วยน้ำหนักที่เกินค่าข้างต้น อาจเป็นสาเหตุทำให้อายุการใช้งานสั้นลงและทำให้เกิดความเสียหายได้
ทิศทางโมเมนต์รุ่นสไลด์
คอนโทรลเลอร์ที่ใช้ได้
(หมายเหตุ) ซีรี่ส์ EC จะติดตั้งคอนโทรลเลอร์ไว้ภายใน สำหรับรายละเอียดของคอนโทรลเลอร์ในตัว กรุณาดูหน้า 2-769
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
| (1) ความเร็วในการเปิดปิดของ "ข้อมูลจำเพาะหลัก" แสดงถึงความเร็วในการทำงานต่อ 1 กรงจับ ความเร็วในการทำงานสัมพัทธ์เพิ่มขึ้นเป็นสองเท่า (2) แรงจับยึดสูงสุดของ "ข้อมูลจำเพาะหลัก" คือ ค่าผลรวมของแรงจับยึด 3 กรงจับ เมื่อระยะห่างจุดจับยึดเป็น 0 และระยะที่ยื่นออกมาเป็น 0 กรุณาดูน้ำหนักของชิ้นงานที่สามารถเคลื่อนย้ายได้จริงจากกราฟ "การยืนยันระยะห่างจุดจับยึด" และ "แรงจับยึด" (3) ต้องแน่ใจว่ามีการใช้การกดเมื่อจับยึดชิ้นงาน (4) กลไก Self-log จะรักษาแรงยึดจับชิ้นงาน แม้ในขณะปิดเครื่องก็ตาม (แต่ไม่รับประกันว่าจะไม่เกิดการหล่นของชิ้นงาน) เมื่อถอดชิ้นงานออกจากกรงจับ (Finger) ขณะที่ปิดเครื่อง ให้หมุนสกรูเปิด/ปิดที่ด้านข้าง หรือถอดกรงจับ (Finger) ออกเพื่อปลดชิ้นงาน (5) กรุณาใช้ในอัตราการทำงานไม่เกิน 90% กรุณาดูรายละเอียดเพิ่มเติมที่หน้า 1-326 |
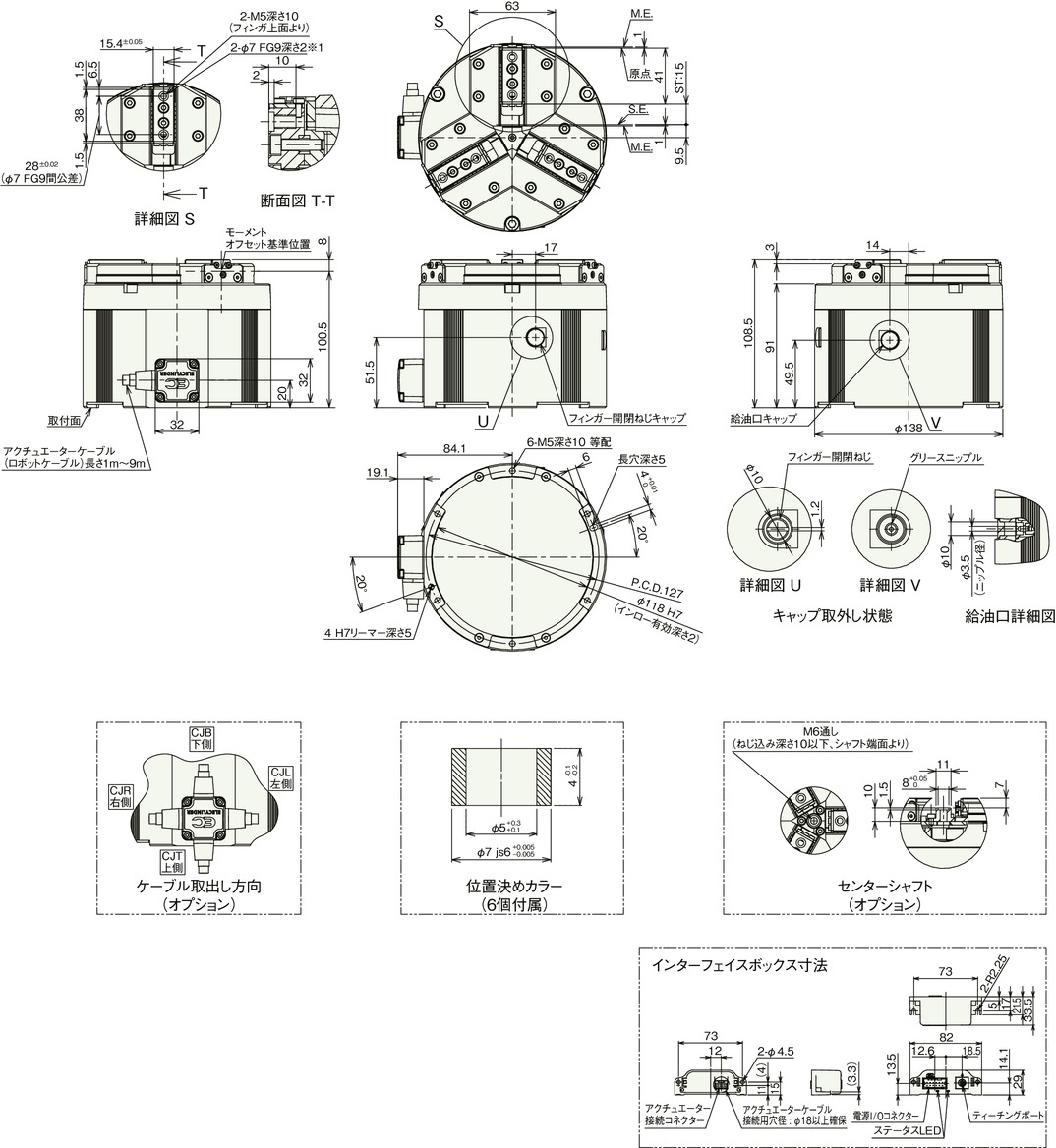
ภาพร่างแสดงขนาด

M.E.: จุดสิ้นสุดเมคานิคัล
S.E.: จุดสิ้นสุดสโตรค
*1 อุปกรณ์สำหรับติดตั้งกรงจับมาพร้อมกับตำแหน่งยึด 6 ตำแหน่ง
(หมายเหตุ) โดยมาตรฐานแล้วด้านเปิดคือจุดเริ่มต้น หากต้องการกำหนดให้ตำแหน่งตั้งต้นอยู่ที่ด้านปิดกรุณาระบุตัวเลือก (รุ่น : NM)
น้ำหนักแยกตามสโตรค
| รายการ | เนื้อหา |
|---|---|
| น้ำหนักมวลสาร | 2.42 กก. |
(หมายเหตุ) ข้อมูลดังกล่าวเป็นค่าที่ได้จากการเลือกใช้สายเคเบิลแอคชูเอเตอร์ที่มีความยาว 1 ม.
ตรวจสอบระยะห่างของจุดจับยึด
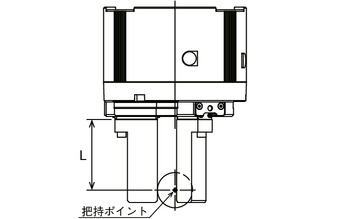
กรุณาใช้งานโดยมีระยะห่างจากพื้นผิวที่ติดตั้งกรงจับ (นิ้ว) ไปจนถึงจุดจับยึด (L) น้อยกว่า 100 มม.
(หมายเหตุ) แม้ระยะระหว่างจุดจับยึดจะอยู่ภายในช่วงค่าที่กำหนด แต่ควรให้มีขนาดเล็กและเบาที่สุดเท่าที่จะทำได้ หากกรงจับ (Finger) มีความยาวหรือน้ำหนักมาก แรงเฉื่อยและโมเมนต์การดัด ณ ขณะที่เปิดปิด อาจทำให้ประสิทธิภาพการทำงานลดลงหรือส่งผลเสียต่อส่วนไกด์
แรงจับยึด
■ แผนภาพแสดงความสัมพันธ์ระหว่างแรงจับยึดกับค่าขีดจำกัดของกระแส
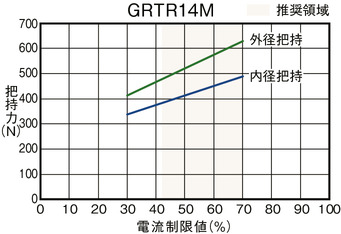
(หมายเหตุ) ข้อมูลดังกล่าวเป็นค่าผลรวมของ 3 กรงจับ เมื่อระยะห่างจุดจับยึด (L) เป็น 0
(หมายเหตุ) เป็นเพียงตัวเลขโดยประมาณ มีการแปรผันประมาณ 0-40% โดยเฉพาะอย่างยิ่ง เมื่อมีการกำหนดค่าขีดจำกัดของกระแสเกินช่วงที่แนะนำ (ส่วนที่ระบายสีในกราฟ) จะยิ่งทำให้เกิดความผันผวนมากขึ้น
(หมายเหตุ) เมื่อทำการจับยึด (แรงกด) ความเร็วจะคงที่อยู่ที่ 20 มม./วินาที
■ ระยะจุดจับยึดและแรงจับโดยประมาณ
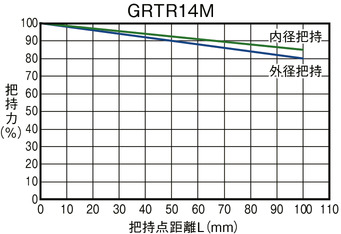
(หมายเหตุ) แสดงแรงจับยึดซึ่งขึ้นอยู่กับตำแหน่งที่ขยายเมื่อแรงจับสูงสุดคือ 100% ผลลัพธ์อาจแตกต่างกันไปขึ้นอยู่กับความแข็งแกร่งของอุปกรณ์ติดตั้งที่มากับกรงจับ (Finger)