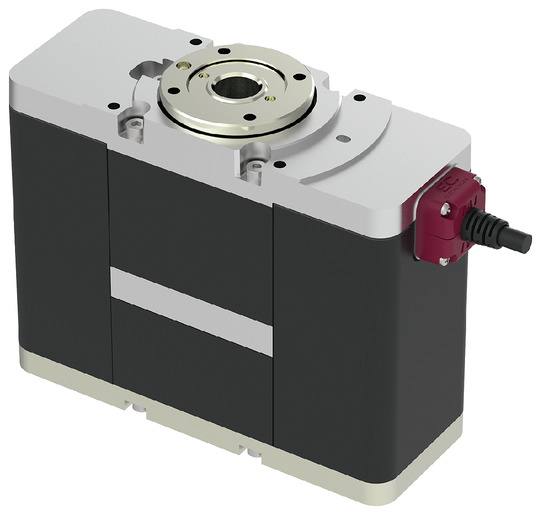
คุณสมบัติพิเศษของผลิตภัณฑ์


รูปแบบการติดตั้ง


ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | |
|---|---|---|
| อัตราส่วนการลดความเร็ว | 1/10.5 | |
| แรงบิดสูงสุด (N・m) | 0.6 | |
| ความเร็ว/ความเร็วเร่งลด (หมายเหตุ 7) | ความเร็วสูงสุด (องศา/วินาที) | 600 |
| ความเร็วต่ำสุด (องศา/s) | 20 | |
| พิกัดความเร็วเร่ง-ลด (G) | 0.3 | |
| ความเร็วเร่ง-ลดสูงสุด (G) | 0.5 | |
| เบรก | ข้อมูลจำเพาะของเบรก | เบรกแม่เหล็กไฟฟ้าชนิด NON-EXCITATION OPERATION |
| แรงบิดยึดเบรก (N·m) (หมายเหตุ 8) | 0.5 | |
| ขอบเขตการเคลื่อนที่ (องศา) | 330 | |
(หมายเหตุ 7) 1G≒9807 องศา/วินาที2
(หมายเหตุ 8) โมเมนต์ความเฉื่อยและแรงบิดยึดเบรกที่ยอมรับไม่จำเป็นต้องเข้ากันได้
กรุณาตรวจสอบว่าว่าแรงบิดในการบรรทุกน้อยกว่าแรงบิดยึด
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | Timing belt |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.05 องศา |
| วิธีการย้อนกลับจุดเริ่มต้น | ระบบแมคคานิคสต๊อปเปอร์ |
| ความแม่นยำในการกลับจุดเริ่มต้น | ±0.05 องศา |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | - (ไม่สามารถแสดงได้ เนื่องจากเป็นฟังก์ชั่นกำหนดตำแหน่ง 2 จุด ) |
| Backlash (หมายเหตุ 9) | 0.15 องศา |
| แรงขับโหลดที่ยอมรับได้ | 100N |
| โมเมนต์บรรทุกที่ยอมรับแบบพลวัต (หมายเหตุ 10) | 1.5N・m |
| โมเมนต์ความเฉื่อยที่ยอมรับได้ | 0.011kg・m2 |
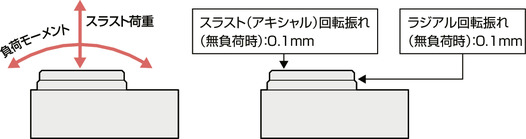
| การเบี่ยงเบนของการหมุนในแนวรัศมี | ไม่เกิน 0.1 มม. |
| การเบี่ยงเบนของแรงขับหมุน | ไม่เกิน 0.1 มม. |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำควบแน่น) |
| ระดับการป้องกัน | IP20 |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS |
| ชนิดมอเตอร์ | พัลส์มอเตอร์ (□28) (ความจุไฟฟ้า: สูงสุด 2A) |
| ชนิดเอนโค้ดเดอร์ | ชนิดเพิ่มค่า / ชนิดไร้แบตเตอรี่สัมบูรณ์ |
| จำนวนพัลส์เอนโค้ดเดอร์ | 16384 pulse/rev |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" |
(หมายเหตุ 9) ด้วยรูปแบบการขับเคลื่อนของไทม์มิ่งเบลท์ จึงไม่มี Backlash เชิงกล อย่างไรก็ตาม มีความสูญเสียฮิสเตอริซิสเนื่องจากการยืดของไทม์มิ่งเบลท์
(หมายเหตุ 10) กรณีรูปแบบแนวนอนและแนวตั้งจะเป็น 0.5N·m
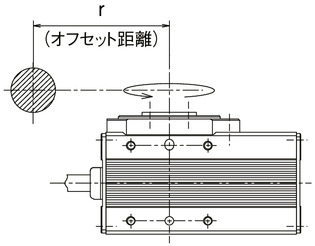
ทิศทางโมเมนต์ชนิดโรตารี่
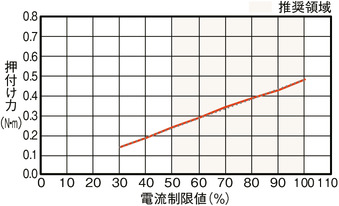
ภาพแสดงความสัมพันธ์ระหว่างแรงผลักกับค่าจำกัดกระแสไฟฟ้า
คอนโทรลเลอร์ที่ใช้ได้
(หมายเหตุ) ซีรี่ส์ EC จะติดตั้งคอนโทรลเลอร์ไว้ภายใน สำหรับรายละเอียดของคอนโทรลเลอร์ในตัว กรุณาดูหน้า 2-769
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
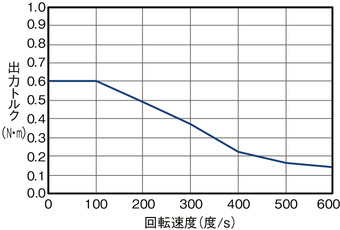
| (1) แรงบิดเอาต์พุตจะลดลงเมื่อความเร็วในการหมุนเพิ่มขึ้น สำหรับรายละเอียด กรุณาตรวจสอบ "แผนภาพความสัมพันธ์ของความเร็วในการหมุนและแรงบิดที่ได้" (2) โมเมนต์ความเฉื่อยที่ยอมรับของชิ้นงานที่ถูกหมุนจะแตกต่างกันไปขึ้นอยู่กับความเร็วในการหมุน สำหรับรายละเอียด โปรดตรวจสอบ "แผนภาพความสัมพันธ์ของความเร็วในการหมุนและโมเมนต์ความเฉื่อยที่ยอมรับ" (3) เบรกมีไว้สำหรับจับ ห้ามใช้เพื่อวัตถุประสงค์ในการเบรก/หยุดฉุกเฉิน (4) กรณีที่จะให้ดำเนินการเลือก ให้คำนวณตาม "วิธีการเลือก (จากหน้า 2-95)" และตรวจสอบเงื่อนไขการใช้งาน (5) กรณีที่ให้ดำเนินการกด กรุณาตรวจสอบ "แผนภาพความสัมพันธ์ของแรงกดและค่ากระแสขีดจำกัด" แรงผลักที่แสดงเป็นค่ามาตรฐาน |
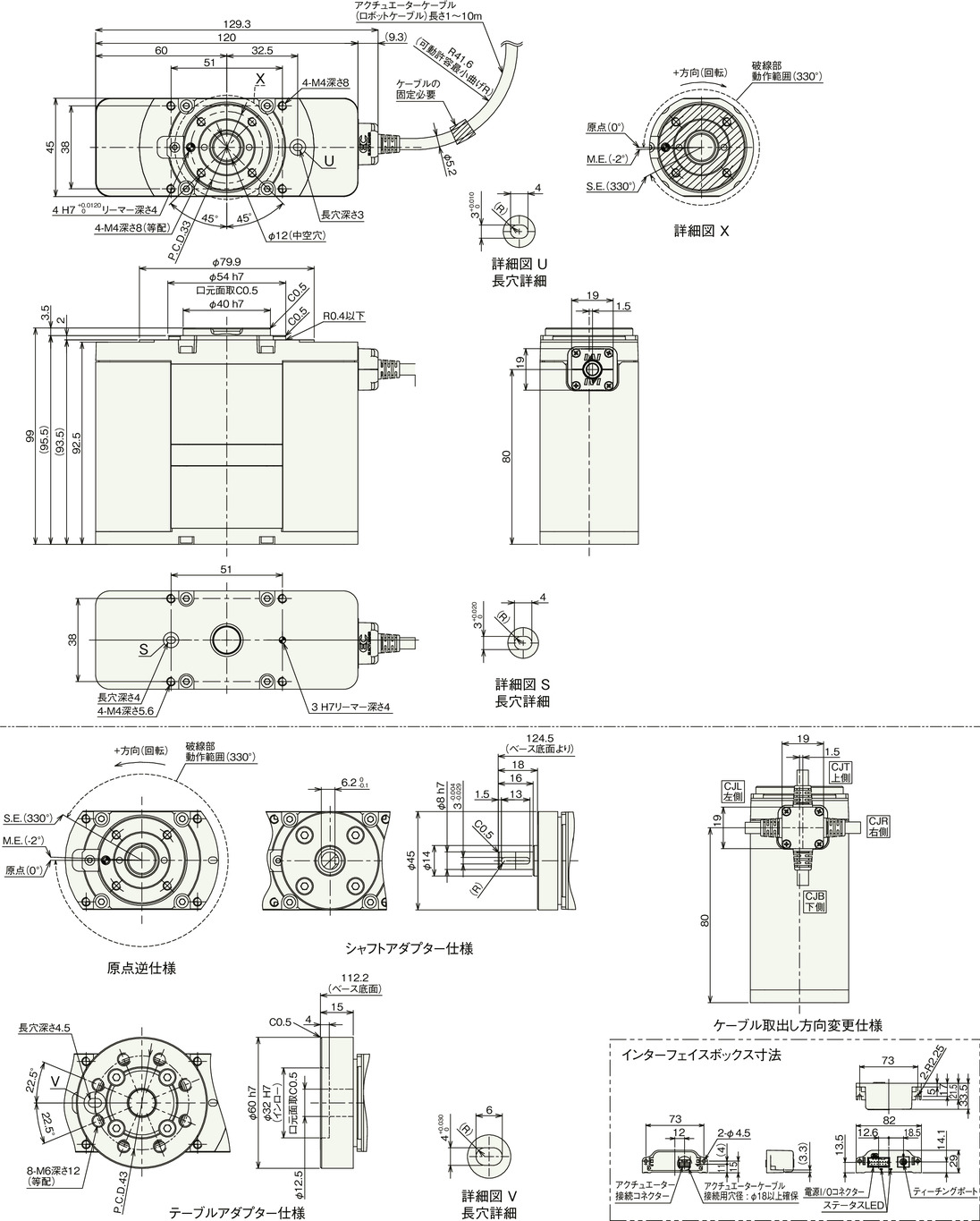
ภาพร่างแสดงขนาด

M.E.: จุดสิ้นสุดเมคานิคัล
S.E.: จุดสิ้นสุดสโตรค
(หมายเหตุ) ส่วนที่เป็นเส้นทแยงในภาพโดยละเอียด X คือส่วนที่หมุน
น้ำหนักมวลสาร
| รายการ | เนื้อหา | |
|---|---|---|
| น้ำหนักมวลสาร | ไม่มีเบรก | 1.00 กก. |
| มีเบรก | 1.10 กก. | |
(หมายเหตุ) น้ำหนักผลิตภัณฑ์ ระบุเป็นค่าเมื่อเลือกสเปคการเชื่อมต่อ RCON และความยาวเคเบิ้ลแอคชูเอเตอร์ 1 ม.
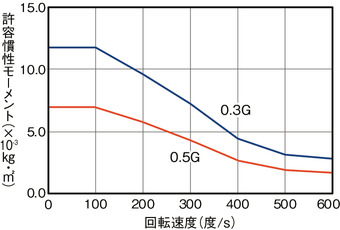
แผนภาพสหสัมพันธ์ของความเร็ว แรงบิดเอาต์พุต และโมเมนต์ความเฉื่อยที่ยอมรับได้
แผนภาพความสัมพันธ์ของความเร็วในการหมุนและแรงบิดที่ได้
แผนภาพความสัมพันธ์ระหว่างความเร็วการหมุนกับโมเมนต์ความเฉื่อยที่ยอมรับ
วิธีการย้อนกลับตำแหน่งเริ่มต้นและทิศทางการหมุนไปข้างหน้า
สเปคการหมุน 330 องศา
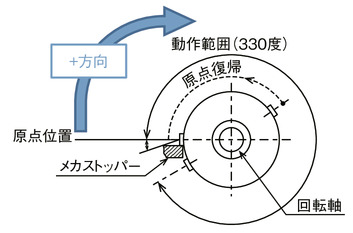
เมื่อมองจากด้านบนของส่วนที่หมุน การหมุนตามเข็มนาฬิกาจะเป็นทิศทาง +
การกลับไปยังตำแหน่งเริ่มต้นจะหมุนทวนเข็มนาฬิกา
ตรวจจับตำแหน่งของตัวหยุดกลไก ย้อนกลับการทำงาน แล้วหยุด
(หมายเหตุ) กรณีที่กลับด้าน ทิศทางการทำงานทั้งหมดจะกลับด้าน
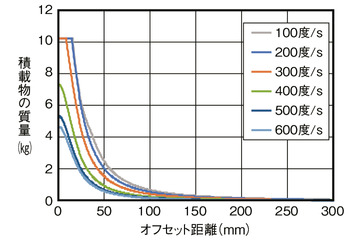
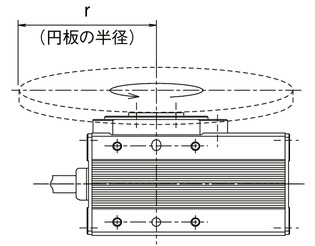
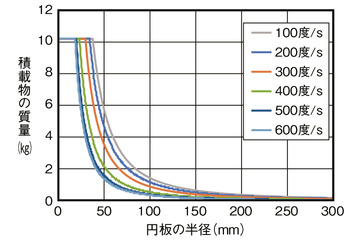
ค่ามาตรฐานของรูปร่างและมวลของโหลด
■กรณีที่จุดศูนย์ถ่วงของน้ำหนักรูปทรงกลมเท่ากับจุดศูนย์กลางการหมุน
อัตราเร่ง 0.3G
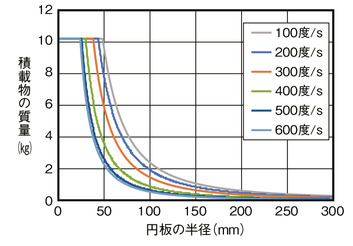
อัตราเร่ง 0.5G
■กรณีที่จุดศูนย์ถ่วงของวัตถุที่น้ำหนักถูกชดเชยจากศูนย์กลางการหมุนที่ได้
อัตราเร่ง 0.3G
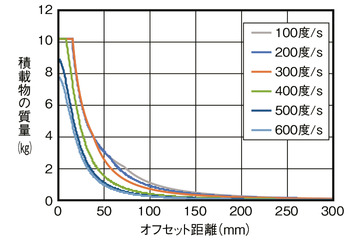
อัตราเร่ง 0.5G