คุณสมบัติพิเศษของผลิตภัณฑ์


รูปแบบการติดตั้ง


ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | ||||
|---|---|---|---|---|---|
| Lead | Ball screw lead (มม.) | 20 | 6 | 3 | |
| แนวนอน | น้ำหนักขนย้าย | น้ำหนักสูงสุดที่ขนย้ายได้ (กก.) (ปิดการประหยัดพลังงาน) | 6 | 40 | 60 |
| น้ำหนักสูงสุดที่ขนย้ายได้ (กก.) (เปิดการประหยัดพลังงาน) | 6 | 40 | 40 | ||
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วสูงสุด (มม./วินาที) | 800 | 450 | 225 | |
| ความเร็วต่ำสุด (มม./วินาที) | 25 | 8 | 4 | ||
| พิกัดความเร็วเร่ง-ลด (G) | 0.3 | 0.3 | 0.3 | ||
| ความเร็วเร่ง-ลดสูงสุด (G) | 1 | 1 | 1 | ||
| แนวตั้ง | น้ำหนักขนย้าย | น้ำหนักสูงสุดที่ขนย้ายได้ (กก.) (ปิดการประหยัดพลังงาน) | 0.5 | 7 | 12.5 |
| น้ำหนักสูงสุดที่ขนย้ายได้ (กก.) (เปิดการประหยัดพลังงาน) | 0.5 | 7 | 12.5 | ||
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วสูงสุด (มม./วินาที) | 640 | 400 | 200 | |
| ความเร็วต่ำสุด (มม./วินาที) | 25 | 8 | 4 | ||
| พิกัดความเร็วเร่ง-ลด (G) | 0.3 | 0.3 | 0.3 | ||
| ความเร็วเร่ง-ลดสูงสุด (G) | 0.5 | 0.5 | 0.5 | ||
| การกด | แรงขับสูงสุด ณ ขณะกด (N) | 67 | 224 | 449 | |
| ความเร็วสูงสุดในการกด (มม./วินาที) | 25 | 20 | 20 | ||
| เบรก | ข้อมูลจำเพาะของเบรก | เบรกแม่เหล็กไฟฟ้าชนิด NON-EXCITATION OPERATION | |||
| แรง Hold ของเบรก (kgf) | 0.5 | 7 | 12.5 | ||
| สโตรค | สโตรคต่ำสุด (มม.) | 50 | 50 | 50 | |
| สโตรคสูงสุด (มม.) | 300 | 300 | 300 | ||
| ระยะ Pitch ของสโตรค (มม.) | 50 | 50 | 50 | ||
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | บอลสกรู φ10 มม. แบบรีด (rolled) C10 |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | Lead 3/6: ±0.02มม., ลีด 20: ±0.03 มม. |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | - (ไม่สามารถแสดงได้ เนื่องจากเป็นฟังก์ชั่นกำหนดตำแหน่ง 2 จุด ) |
| ก้าน (Rod) | วัสดุ φ25 มม.: อลูมิเนียม การชุบด้วยอลูไมต์แบบแข็ง |
| ไกด์เพลา | SUJ2 |
| ขายึดด้านหน้า | คุณสมบัติของวัสดุ : อลูมิเนียมชุบผิวสีขาว |
| ความแม่นยำในการหมุนของก้าน (Rod) | ±0.03 องศา |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำควบแน่น) |
| ระดับการป้องกัน | IP20 |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS |
| ชนิดมอเตอร์ | พัลส์มอเตอร์ (□42) (ความจุไฟฟ้า: สูงสุด 4.2A) |
| ชนิดเอนโค้ดเดอร์ | ชนิดเพิ่มค่า / ชนิดไร้แบตเตอรี่สัมบูรณ์ |
| จำนวนพัลส์เอนโค้ดเดอร์ | 800 pulse/rev |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" |
ตารางความเร่ง/น้ำหนักสูงสุดที่ขนย้ายได้ตามความเร็ว *ปิดการตั้งค่าการประหยัดพลังงานขณะจัดส่ง สำหรับรายละเอียด กรุณาดูหน้า 1-23
ปิดการตั้งค่าการประหยัดพลังงาน (พาวเวอร์โหมด) หน่วยของน้ำหนักสูงสุดที่ขนย้ายได้คือ กก. ช่องว่าง หมายถึงไม่สามารถทำงานได้
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | ||||
|---|---|---|---|---|---|---|
| ความเร็ว (มม./วินาที) | ความเร็วเร่ง (G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 6 | 6 | 5 | 5 | 0.5 | 0.5 |
| 160 | 6 | 6 | 5 | 5 | 0.5 | 0.5 |
| 320 | 6 | 6 | 5 | 3 | 0.5 | 0.5 |
| 480 | 6 | 6 | 5 | 3 | 0.5 | 0.5 |
| 640 | 6 | 4 | 3 | 2 | 0.5 | 0.5 |
| 800 | 4 | 3 | ||||
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | ||||
|---|---|---|---|---|---|---|
| ความเร็ว (มม./วินาที) | ความเร็วเร่ง (G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 40 | 35 | 30 | 25 | 7 | 7 |
| 50 | 40 | 35 | 30 | 25 | 7 | 7 |
| 90 | 40 | 35 | 30 | 25 | 7 | 7 |
| 160 | 40 | 30 | 25 | 20 | 7 | 7 |
| 250 | 40 | 27.5 | 22.5 | 18 | 7 | 7 |
| 350 | 20 | 10 | 8 | 5 | 2.5 | 2 |
| 400 | 10 | 3 | 3 | 0.5 | ||
| 450 | 3 | |||||
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | ||||
|---|---|---|---|---|---|---|
| ความเร็ว (มม./วินาที) | ความเร็วเร่ง (G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 60 | 50 | 45 | 40 | 12.5 | 12.5 |
| 45 | 60 | 50 | 45 | 40 | 12.5 | 12.5 |
| 80 | 60 | 50 | 45 | 40 | 12.5 | 12.5 |
| 125 | 60 | 45 | 35 | 30 | 10 | 10 |
| 175 | 40 | 35 | 25 | 15 | 6 | 5 |
| 200 | 30 | 20 | 10 | 3 | 3.5 | 3.5 |
| 225 | 5 | |||||
เปิดการตั้งค่าการประหยัดพลังงาน (โหมดประหยัดพลังงาน) หน่วยขอน้ำหนักสูงสุดที่ขนย้ายได้คือ กก. ช่องว่าง หมายถึงไม่สามารถทำงานได้
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | |
|---|---|---|---|
| ความเร็ว (มม./วินาที) | ความเร็วเร่ง (G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 6 | 5 | 0.5 |
| 160 | 6 | 5 | 0.5 |
| 310 | 6 | 5 | 0.5 |
| 480 | 4 | 3 | 0.5 |
| 640 | 1 | 1 | |
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | |
|---|---|---|---|
| ความเร็ว (มม./วินาที) | ความเร็วเร่ง (G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 40 | 20 | 7 |
| 50 | 40 | 20 | 7 |
| 90 | 40 | 20 | 7 |
| 160 | 40 | 20 | 7 |
| 200 | 35 | 18 | 5 |
| 250 | 10 | 5 | 2.5 |
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | |
|---|---|---|---|
| ความเร็ว (มม./วินาที) | ความเร็วเร่ง (G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 40 | 25 | 12.5 |
| 25 | 40 | 25 | 12.5 |
| 45 | 40 | 25 | 12.5 |
| 80 | 40 | 25 | 12 |
| 95 | 40 | 20 | 9 |
| 125 | 40 | 10 | 5 |
สโตรคและความเร็วสูงสุด
(หน่วยเป็น มม./วินาที)
| ระยะ Lead (มม.) | การตั้งค่าการประหยัดพลังงาน | 50-200 (ทุกๆ 50 มม.) | 250 (มม.) | 300 (มม.) |
|---|---|---|---|---|
| 20 | ปิดใช้ | 800<640> | ||
| เปิดใช้ | 640<480> | |||
| 6 | ปิดใช้ | 450<400> | 370<350> | 265 |
| เปิดใช้ | 250 | |||
| 3 | ปิดใช้ | 225<200> | 185 | 130 |
| เปิดใช้ | 125 | |||
(หมายเหตุ) ที่ระบุใน < > คือกรณีที่ใช้งานโดยติดตั้งในแนวตั้งฉาก
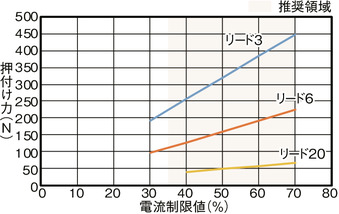
ภาพแสดงความสัมพันธ์ระหว่างแรงผลักกับค่าจำกัดกระแสไฟฟ้า
คอนโทรลเลอร์ที่ใช้ได้
(หมายเหตุ) ซีรี่ส์ EC จะติดตั้งคอนโทรลเลอร์ไว้ภายใน สำหรับรายละเอียดของคอนโทรลเลอร์ในตัว กรุณาดูหน้า 2-769
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
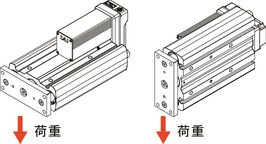
| (1) น้ำหนักขนย้ายสูงสุดในตาราง "ข้อมูลจำเพาะที่สำคัญ" จะระบุด้วยค่าสูงสุด (2) น้ำหนักขนย้ายแนวนอน คือ ค่าในกรณีที่ใช้ไกด์ร่วมด้วยเพื่อไม่ให้แรงแนวรัศมีและแรงโมเมนต์กระทำกับก้าน (Rod) กรณีที่ไม่มีการติดตั้งไกด์ กรุณาดูที่ "น้ำหนักบรรทุกปลาย Front bracket และอายุการใช้งาน" (3) เมื่อดำเนินการกด กรุณาดู "แผนภาพความพันธ์ของแรงกดและค่ากระแสขีดจำกัด" แรงผลักที่แสดงเป็นค่ามาตรฐาน สำหรับข้อควรระวัง กรุณาดูหน้า 1-315 |
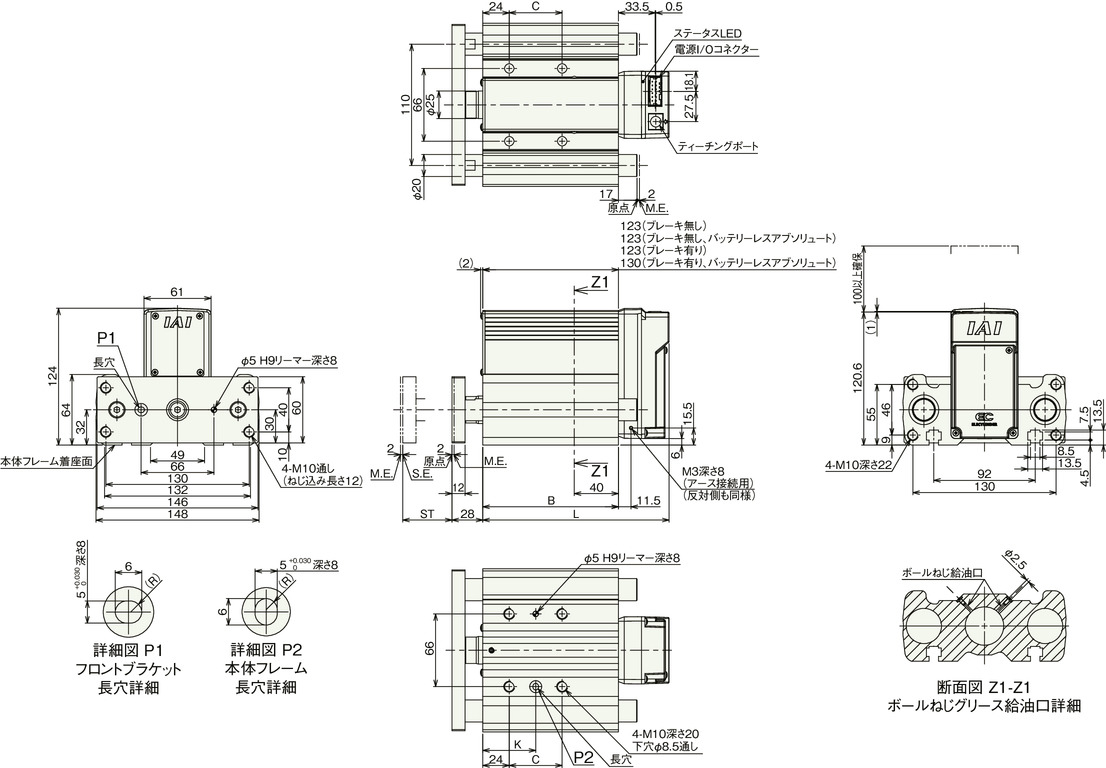
ภาพร่างแสดงขนาด

ST: สโตรค
M.E.: จุดสิ้นสุดเมคานิคัล
S.E.: จุดสิ้นสุดสโตรค
(หมายเหตุ) กรณีที่กลับไปยังจุดเริ่มต้น Rod จะเคลื่อนที่ไปถึง M.E. โปรดระมัดระวังอย่าให้การรบกวนพื้นที่โดยรอบ
ขนาดแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 | 250 | 300 |
|---|---|---|---|---|---|---|
| L | 169 | 219 | 269 | 319 | 369 | 419 |
| B | 123 | 173 | 223 | 273 | 323 | 373 |
| C | 48 | 48 | 124 | 124 | 200 | 200 |
| K | 48 | 48 | 86 | 86 | 124 | 124 |
น้ำหนักแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 | 250 | 300 | |
|---|---|---|---|---|---|---|---|
| น้ำหนัก (กก.) | ไม่มีเบรก | 4.3 | 5.4 | 6.5 | 7.6 | 8.7 | 9.8 |
| มีเบรก | 4.5 | 5.6 | 6.7 | 7.8 | 8.9 | 10 | |
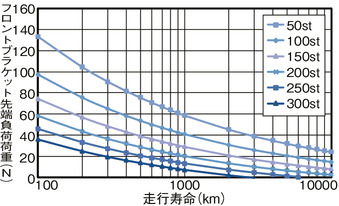
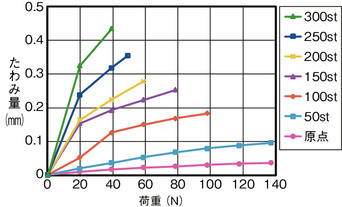
ปริมาณการโก่งปลายของ Front bracket
ไกด์แนวนอน
ไกด์แนวตั้ง

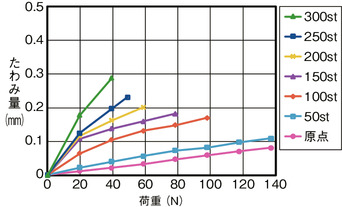
(หมายเหตุ) ปริมาณการโก่งปลายของ Front bracket เป็นเกณฑ์
แรงบิดในการหมุนที่อนุญาตของวงเล็บหน้า
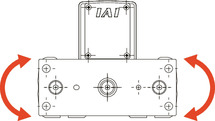
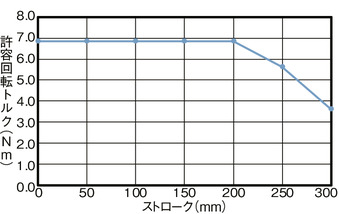
(หมายเหตุ) กรุณาใช้แรงบิดการหมุนให้อยู่ภายในขอบเขตที่ยอมรับได้ตามกราฟ
น้ำหนักบรรทุกปลาย Front bracket และอายุการใช้งาน