
คุณสมบัติพิเศษของผลิตภัณฑ์




รูปแบบการติดตั้ง



ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | |
|---|---|---|
| การเคลื่อนที่แบบจับยึด | แรงจับยึดสูงสุด (N) (ทั้งสองด้าน) | 20 |
| ระยะเวลาในการจับยึด (วินาที) (ทั้งสองข้าง) | ไม่เกิน 0.03 | |
| ความถี่ในการทำงาน (CPM) | 120 | |
| สโตรค (ด้านเดียว) | สโตรคต่ำสุด (มม.) (ด้านเดียว)\ | 2 |
| สโตรคสูงสุด (มม.) (ด้านเดียว) | 2 | |
CPM: รอบต่อนาที
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | กลไกการยึดจับ (Chuck) : สปริงอัด + กลไกลูกเบี้ยว กลไกการปลด (Unchuck) : แรงแม่เหล็กไฟฟ้าโซลินอยด์ + กลไกลูกเบี้ยว |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.1 มม. |
| ความแม่นยำในการกลับจุดเริ่มต้น | - |
| Backlash | ด้านในด้านหนึ่ง ไม่เกิน 0.5 มม. |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | - |
| ไกด์ประคองกรงจับ (Finger guide) | Sliding guide |
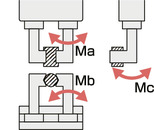
| โมเมนต์ที่ยอมรับได้แบบสถิต | Ma:1.08N・m |
| Mb:1.08N・m | |
| Mc:2.64N・m | |
| โมเมนต์ที่ยอมรับได้แบบพลวัต | - |
| - | |
| - | |
| แรงในแนวแกนเพลาที่ยอมรับได้ (โหลดแนวนอนที่ยอมรับได้) | 240N |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำ) |
| ระดับการป้องกัน | IP20 |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS |
| ชนิดมอเตอร์ | - |
| ชนิดเอนโค้ดเดอร์ | - |
| จำนวนพัลส์เอนโค้ดเดอร์ | - |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" |
ทิศทางโมเมนต์รุ่นสไลด์
แผนภาพแสดงความสัมพันธ์ระหว่างแรงจับยึดและจังหวะการเปิด/ปิด
แรงจับยึดวงนอก (ด้านเดียว)
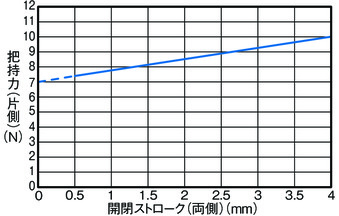
(หมายเหตุ) แรงจับยึดจะเปลี่ยนไปตามจังหวะการเปิดและปิดของกรงจับ (Finger)
แรงจับยึดวงใน (ด้านเดียว)

ตรวจสอบระยะห่างของจุดจับยึด

โปรดใช้งานโดยกำหนดะยะห่าง (L, H) จากด้านที่ติดตั้งกรงจับ (Finger) ไปยังจุดจับยึดให้อยู่ในช่วงของกราฟ

(หมายเหตุ) โปรดระมัดระวังว่าหากเกินช่วงจำกัดที่กำหนด จะเกิดโมเมนต์ที่มากเกินไปกับจุดแกว่งของกรงจับ (Finger) และกลไกภายใน ซึ่งอาจส่งผลเสียต่ออายุการใช้งาน
คอนโทรลเลอร์ที่ใช้ได้
(หมายเหตุ) ต้องใช้กล่องไดรเวอร์เพื่อใช้งานซีรี่ส์ GRS สำหรับรายละเอียด โปรดดูที่หน้า 5-85
ข้อควรระวังในการเลือก
| (1) ชุดจับยึดวงนอกจะเปิดขึ้นเมื่อมีไฟฟ้าไหลผ่าน และปิดเมื่อไม่มีไฟฟ้าไหลผ่าน (แบบปิดเสมอ) ชุดจับยึดวงในจะปิดเมื่อมีไฟฟ้าไหลผ่าน และเปิดเมื่อไม่มีไฟฟ้าไหลผ่าน (เปิดตลอดเวลา) (2) เนื่องจากกลไกการจับยึดใช้สปริง แรงจับยึดจึงเปลี่ยนไปตามจังหวะการเปิด/ปิดของกรงจับ (Finger) สำหรับรายละเอียด โปรดดูที่ "แผนภาพแสดงความสัมพันธ์ระหว่างแรงจับยึดและจังหวะการเปิด/ปิด" (3) ต้องแน่ใจว่ามีการใช้งานการกดเมื่อจับยึดชิ้นงาน สำหรับรายละเอียด โปรดดูที่หน้า 1-311 (4) จำเป็นต้องใช้กล่องไดรเวอร์เพื่อใช้งานโซลินอยด์กริปเปอร์เสมอ สำหรับรายละเอียด โปรดดูที่ 5-85 (5) ดูวิธีเลือกกริปเปอร์ที่ 1-311 |
มาตรฐานต่างประเทศ


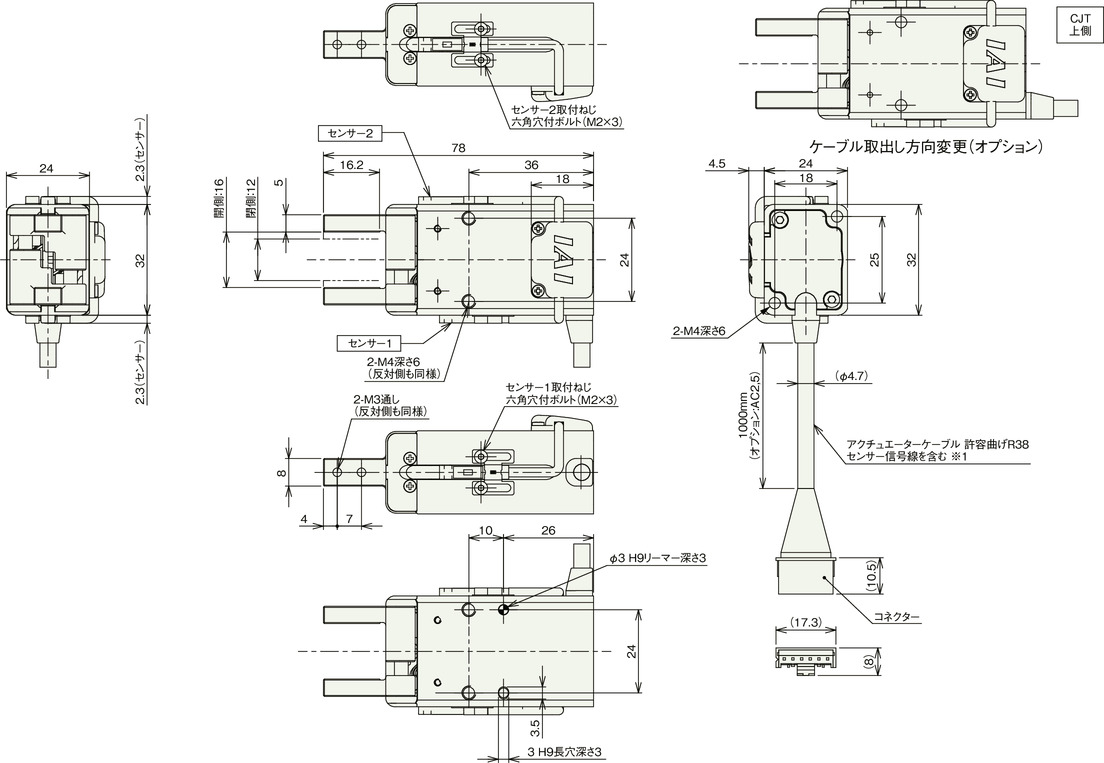
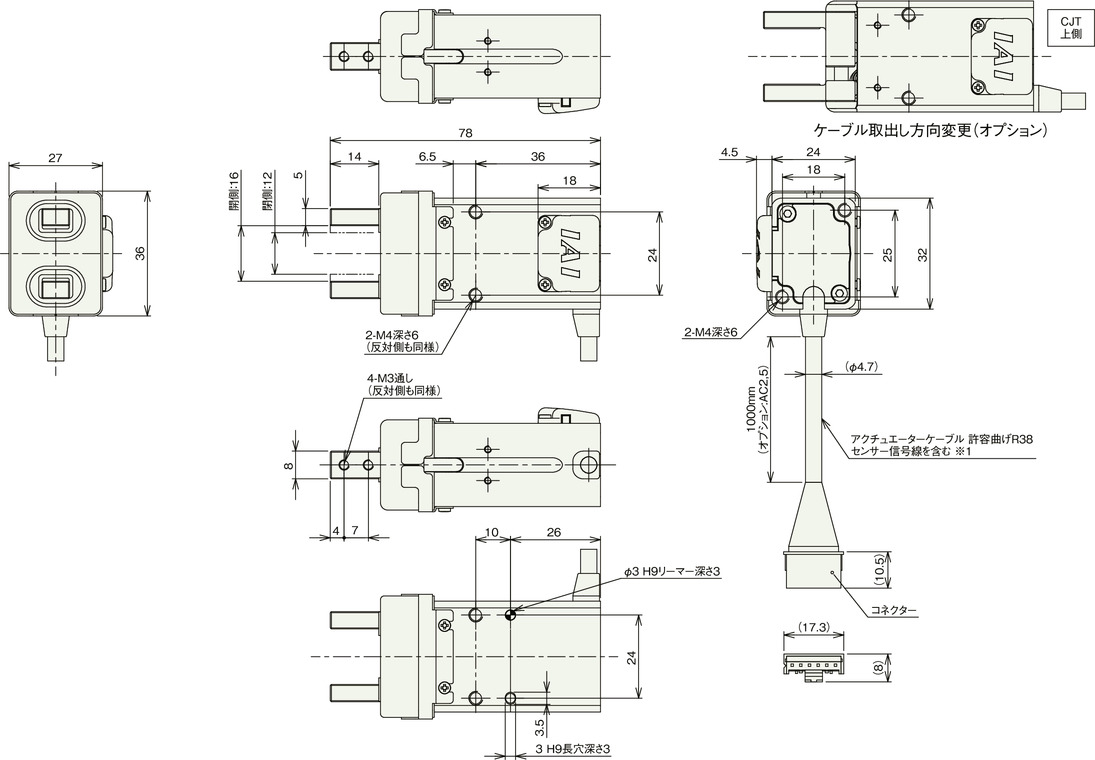
ภาพร่างแสดงขนาด

*1 สายเคเบิลแอชูเอเตอร์เป็นสายเคเบิลของหุ่นยนต์ ความยาวสายเคเบิลมาตรฐานคือ 1,000 มม. และสามารถเลือกเปลี่ยนด้วยอ็อปชั่นขนาด 2000 มม. หรือ 5000 มม. (รุ่น: AC2 / AC5)

ติดตั้งเซ็นเซอร์ (อุปกรณ์เสริม)
*1 สายเคเบิลแอชูเอเตอร์เป็นสายเคเบิลของหุ่นยนต์ ความยาวสายเคเบิลมาตรฐานคือ 1,000 มม. และสามารถเลือกเปลี่ยนด้วยอ็อปชั่นขนาด 2000 มม. หรือ 5000 มม. (รุ่น: AC2 / AC5)
การติดตั้งฝาครอบยาง (อุปกรณ์เสริม)
*1 สายเคเบิลแอชูเอเตอร์เป็นสายเคเบิลของหุ่นยนต์ ความยาวสายเคเบิลมาตรฐานคือ 1,000 มม. และสามารถเลือกเปลี่ยนด้วยอ็อปชั่นขนาด 2000 มม. หรือ 5000 มม. (รุ่น: AC2 / AC5)
น้ำหนักมวลสาร
| รายการ | เนื้อหา |
|---|---|
| น้ำหนักมวลสาร | 0.27 กก. |