
ความเร็วสูงสุดแยกตามสโตรค
BL□HB3H
(หน่วยเป็น มม./วินาที)
| 100~500 | 550~700 | 900~1200 | 1300 | 1400 | 1500 | 1600 | 1700 | 1800 | 1900 | 2000 | 2100 | 2200 | 2300 | 2400 | 2500 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| แกน X | - | 2400 | 2200 | 1965 | 1725 | 1530 | 1365 | 1225 | 1110 | 1005 | 915 | 840 | 770 | 710 | 655 | |
| แกน Y | 2400 | - | ||||||||||||||
| แกน Z | 1200 | - | ||||||||||||||
BL□HB3M
(หน่วยเป็น มม./วินาที)
| 100~500 | 550~700 | 900~1200 | 1300 | 1400 | 1500 | 1600 | 1700 | 1800 | 1900 | 2000 | 2100 | 2200 | 2300 | 2400 | 2500 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| แกน X | - | 2400 | 2200 | 1965 | 1725 | 1530 | 1365 | 1225 | 1110 | 1005 | 915 | 840 | 770 | 710 | 655 | |
| แกน Y | 2400 | - | ||||||||||||||
| แกน Z | 600 | - | ||||||||||||||
สเปคร่วม
| รูปแบบการขับเคลื่อน | บอลสกรู แบบรีด C10 [เทียบเท่าแบบรีด C5] |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | แกน X ±0.02 มม. แกน Y / แกน Z ±0.01 มม. [แกน X ±0.01 มม. แกน Y / แกน Z ±0.005 มม.] |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ไม่เกิน 0.05 มม. [0.02 มม.] |
| ไกด์ | แบบมีตัว Base |
| ฐาน | วัสดุ : อะลูมิเนียม ชุบผิวสีขาว |
| ส่งกำลังมอเตอร์แกน X / Lead | 600W/40 มม. |
| ส่งกำลังมอเตอร์แกน Y / Lead | 400W/40 มม. |
| ส่งกำลังมอเตอร์แกน Z / Lead | 200W/20 มม. (H), 10 มม. (M) |
น้ำหนักขนย้าย
หน่วยที่แสดงในตารางคือ กก.
BL□HB3H
| สโตรคแกน Y | ||
|---|---|---|
| 100~700 | ||
| สโตรคแกน Z | 100 | 10.0 |
| 150 | ||
| 200 | ||
| 250 | ||
| 300 | ||
| 350 | ||
| 400 | ||
| 450 | ||
| 500 | ||
BL□HB3M
| สโตรคแกน Y | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 100~300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | ||
| สโตรคแกน Z | 100 | 20.0 | 20.0 | 20.0 | 20.0 | 20.0 | 20.0 | 19.8 | 19.0 | 18.2 |
| 150 | 20.0 | 20.0 | 20.0 | 20.0 | 20.0 | 19.2 | 18.4 | 17.6 | ||
| 200 | 20.0 | 20.0 | 20.0 | 20.0 | 19.4 | 18.7 | 17.8 | 17.1 | ||
| 250 | 20.0 | 20.0 | 20.0 | 19.7 | 18.8 | 18.0 | 17.2 | 16.4 | ||
| 300 | 20.0 | 20.0 | 20.0 | 19.1 | 18.3 | 17.5 | 16.7 | 15.9 | ||
| 350 | 20.0 | 20.0 | 19.4 | 18.6 | 17.7 | 17.0 | 16.1 | 15.3 | ||
| 400 | 20.0 | 19.8 | 18.9 | 18.0 | 17.2 | 16.4 | 15.6 | 14.8 | ||
| 450 | 19.9 | 19.1 | 18.3 | 17.4 | 16.6 | 15.8 | 14.9 | 14.2 | ||
| 500 | 19.4 | 18.6 | 17.7 | 16.9 | 16.0 | 15.3 | 14.4 | 13.6 | ||
คอนโทรลเลอร์ที่ใช้ได้
โปรดดูที่หน้าคอนโทรลเลอร์แต่ละตัว (หน้า 7-4) อนึ่ง คอนโทรลเลอร์ทำการจำหน่ายแยกต่างหาก
มาตรฐานต่างประเทศ

ข้อควรระวังในการเลือก
| (1) ช่องสโตรคของรายการโมเดล ในโมเดลแสดงด้วยหน่วย ซม. (เซนติเมตร) (2) ความยาวสายเคเบิลคือระยะตั้งแต่กล่องคอนเน็กเตอร์แกน X (กรณีมีรางกระดูกงูคือนับตั้งแต่สายเคเบิลของแอคชูเอเตอร์แกน X) ไปจนถึงคอนโทรลเลอร์ ตามมาตรฐานแล้วยาว 3 ม. หรือ 5 ม. แต่ความยาวระยะอื่นก็สามารถรองรับได้ในหน่วย ม. สามารถใช้งานได้ความยาวสูงสุดถึง 20 ม. (3) โปรดระวังว่ายิ่งสโตรคยาวยิ่งทำให้ความเร็วสูงสุดลดลง (4) ความเร็วเร่งจำกัดของแกน X เท่ากับ 0.3G, แกน Y / แกน Z เท่ากับ 0.4G น้ำหนักขนย้ายในกรณีที่ทำงานด้วยความเร็วเร่งจำกัด เมื่อเพิ่มความเร็วเร่ง น้ำหนักขนย้ายที่ได้จะลดลง (5) ที่ระบุใน [ ] คือในกรณีที่เป็นโมเดลแบบสเปคความแม่นยำสูง |
รายละเอียดโมเดล
| ทิศทาง ประกอบร่วม XY (ข้อควรระวัง 1) | แบบความเร็ว แกน Z (ข้อควรระวัง 2) | รูปแบบ |
|---|---|---|
| 1 | H | ICSB3【ICSPB3】-BL1HB3H-①-②③-④⑤-⑥⑦-T2-⑧-⑨ |
| M | ICSB3【ICSPB3】-BL1HB3M-①-②③-④⑤-⑥⑦-T2-⑧-⑨ | |
| 2 | H | ICSB3【ICSPB3】-BL2HB3H-①-②③-④⑤-⑥⑦-T2-⑧-⑨ |
| M | ICSB3【ICSPB3】-BL2HB3M-①-②③-④⑤-⑥⑦-T2-⑧-⑨ | |
| 3 | H | ICSB3【ICSPB3】-BL3HB3H-①-②③-④⑤-⑥⑦-T2-⑧-⑨ |
| M | ICSB3【ICSPB3】-BL3HB3M-①-②③-④⑤-⑥⑦-T2-⑧-⑨ | |
| 4 | H | ICSB3【ICSPB3】-BL4HB3H-①-②③-④⑤-⑥⑦-T2-⑧-⑨ |
| M | ICSB3【ICSPB3】-BL4HB3M-①-②③-④⑤-⑥⑦-T2-⑧-⑨ |
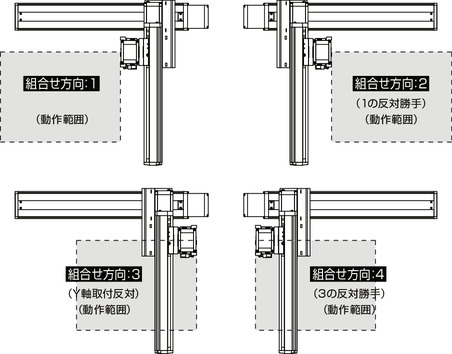
(ข้อควรระวัง 1) ทิศทางการประกอบร่วม XY โปรดดูที่ภาพด้านล่าง รายละเอียดของ 1 - 9 ในโมเดลข้างต้น โปรดดูที่ตารางด้านล่าง
(ข้อควรระวัง 2) น้ำหนักขนย้ายและความเร็วสูงสุดจะแปรผันตามชนิดของแกน Z
คำอธิบายสัญลักษณ์ในโมเดล
| เลขที่ | เนื้อหา | รายละเอียดที่ระบุ |
|---|---|---|
| ① | ชนิดเอนโค้ดเดอร์ | A : แบบสัมบูรณ์ I : แบบเพิ่มค่า |
| ② | สโตรคแกน X | 90:900 มม. ~ 250:2500 มม. |
| ③ | แกน X อุปกรณ์เสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ④ | สโตรคแกน Y | 10:100 มม. ~ 70:700 มม. |
| ⑤ | แกน Y อ็อปชั่นเสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ⑥ | สโตรคแกน Z | 10:100 มม. ~ 50:500 มม. |
| ⑦ | แกน Z อ็อปชั่นเสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ⑧ | ความยาวสายเคเบิล | 3L:3 ม. 5L:5 ม. □L:□ ม. |
| ⑨ | แกน Y - แกน Z การเดินสายเคเบิล | CT-CT : รางกระดูกงู - รางกระดูกงู |
ทิศทาง ประกอบร่วม XY
แกนโครงสร้าง
| ชื่อเรียกแกน | รูปแบบ | หน้าสำหรับอ้างอิง |
|---|---|---|
| แกน X | ISA【ISPA】-WXMX-①-600-40-②-T2-⑪-③ | 2-441 |
| แกน Y | ISB【ISPB】-LXM-①-400-40-④-T2-⑪-⑤ | 2-393 |
| แกน Z | ISB【ISPB】-MXM-①-200-⑩-⑥-T2-⑪-⑦ | 2-361 |
(ข้อควรระวัง) โมเดลข้างต้นที่ 1 - 7 โปรดดูที่สัญลักษณ์ภายในโมเดล อนึ่ง สโตรคที่แสดงใช้หน่วย มม. (มิลลิเมตร)
(ข้อควรระวัง) หมายเลข 10 ในโมเดลข้างต้นจะมีระบุ Lead ไว้ด้วย
20 : กรณีแบบความเร็วแกน Z คือ H
10 : กรณีประเภทความเร็วแกน Z คือ M
(ข้อควรระวัง) หมายเลข 11 ในโมเดลข้างต้น มีระบุทิศทางการนำสายเคเบิลออก ทิศทางการนำสายออก โปรดดูที่หน้า 4-25
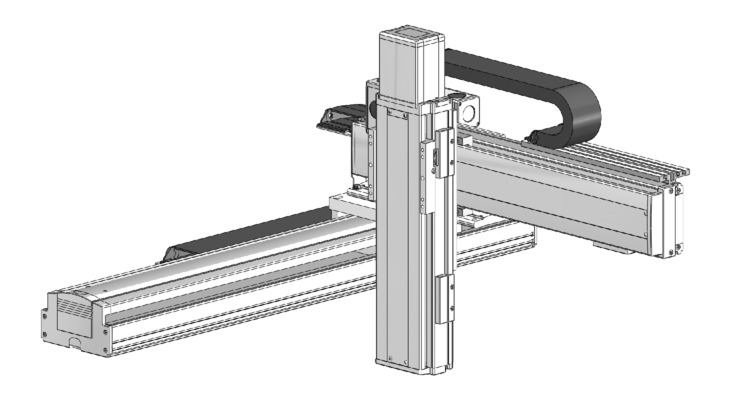
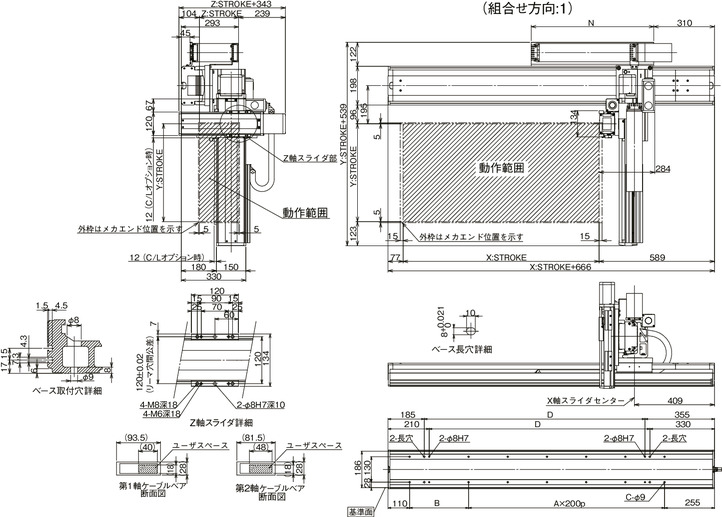
ภาพร่างแสดงขนาด

ICSB3【ICSPB3】-BL□HB3□-CT-CT (สเปคมีรางกระดูกงู) ทิศทางประกอบ 1
(ข้อควรระวัง) ตำแหน่งประกอบที่ปรากฏในดรอว์อิ้งจะกลายเป็นจุดเริ่มต้น กรณีจะเปลี่ยนจุดเริ่มต้น โปรดระบุ NM ที่เป็นอ็อปชั่นเสริม และกรณีจะเปลี่ยนจุดเริ่มต้นหลังส่งมอบสินค้าแล้วจะต้องทำการปรับคืน จึงโปรดใช้ความระวัง
ICSB3【ICSPB3】-BL□HB3□-CT-CT (สเปคมีรางกระดูกงู) ทิศทางประกอบ 3
(ข้อควรระวัง) ตำแหน่งประกอบที่ปรากฏในดรอว์อิ้งจะกลายเป็นจุดเริ่มต้น กรณีจะเปลี่ยนจุดเริ่มต้น โปรดระบุ NM ที่เป็นอ็อปชั่นเสริม และกรณีจะเปลี่ยนจุดเริ่มต้นหลังส่งมอบสินค้าแล้วจะต้องทำการปรับคืน จึงโปรดใช้ความระวัง
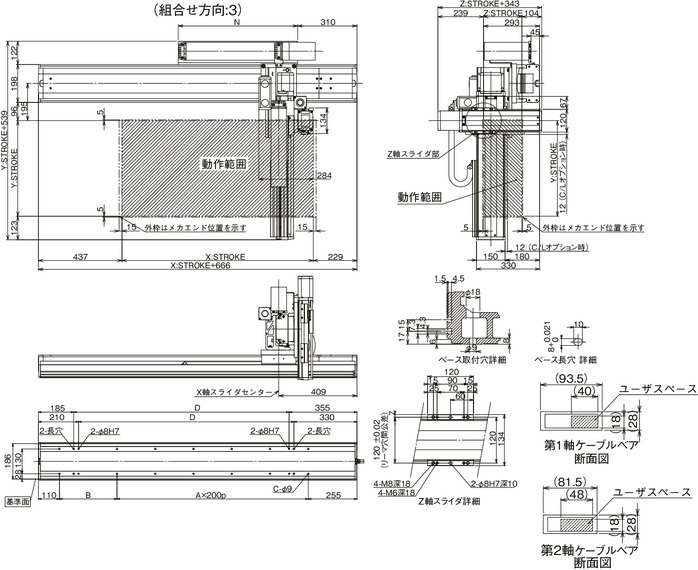
| สโตรคแกน X | 900 | 1000 | 1100 | 1200 | 1300 | 1400 | 1500 | 1600 | 1700 | 1800 | 1900 | 2000 | 2100 | 2200 | 2300 | 2400 | 2500 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 5 | 5 | 6 | 6 | 7 | 7 | 8 | 8 | 9 | 9 | 10 | 10 | 11 | 11 | 12 | 12 | 13 |
| B | 201 | 301 | 201 | 301 | 201 | 301 | 201 | 301 | 201 | 301 | 201 | 301 | 201 | 301 | 201 | 301 | 201 |
| C | 14 | 14 | 16 | 16 | 18 | 18 | 20 | 20 | 22 | 22 | 24 | 24 | 26 | 26 | 28 | 28 | 30 |
| D | 1026 | 1126 | 1226 | 1326 | 1426 | 1526 | 1626 | 1726 | 1826 | 1926 | 2026 | 2126 | 2226 | 2326 | 2426 | 2526 | 2626 |
| N | 575 | 625 | 675 | 725 | 775 | 825 | 875 | 925 | 975 | 1025 | 1075 | 1125 | 1175 | 1225 | 1275 | 1325 | 1375 |