
คุณสมบัติพิเศษของผลิตภัณฑ์



ความเร็วสูงสุดแยกตามสโตรค
(หน่วยเป็น มม./วินาที)
| สโตรค | ||||||||
|---|---|---|---|---|---|---|---|---|
| 200 | 300~700 | 750~800 | 850~900 | 950~1000 | 1050~1100 | 1150~1200 | 1250~1300 | |
| แกน X | - | 1200 | 920 | 765 | 645 | 550 | 440 | |
| แกน Y | 1200 | - | ||||||
(หน่วยเป็น มม./วินาที)
| สโตรค 200 มม. | |
|---|---|
| แกน Z | 1256 มม./วินาที (หมายเหตุ) |
(หน่วยเป็น มม./วินาที)
| สโตรค ±360 องศา | |
|---|---|
| แกนหมุน | 2200 องศา/วินาที (หมายเหตุ) |
(หมายเหตุ) คือค่ากรณีที่ใช้งานด้วยคำสั่งทำงานแบบ PTP
น้ำหนักขนย้าย
หน่วยที่แสดงในตารางคือ กก.
| สโตรคแกน Y | |||||||
|---|---|---|---|---|---|---|---|
| 200 | 300 | 400 | 500 | 600 | 700 | ||
| สโตรคแกน Z | 200 | พิกัด 2.0 กก. (ที่ความเร็วเร่ง 0.3G) สูงสุด 6.0 กก. (ที่ความเร็วเร่ง 0.1G) | |||||
(หมายเหตุ) เป็นค่ากรณีที่ทำงานในความเร็วเร่งพิกัด กรุณาดูที่ "ข้อควรระวังในการเลือก"
คอนโทรลเลอร์ที่ใช้ได้
โปรดดูที่หน้าคอนโทรลเลอร์แต่ละตัว (หน้า 8-8) คอนโทรลเลอร์จะจำหน่ายแยก
มาตรฐานต่างประเทศ

ข้อควรระวังในการเลือก
| (1) ช่องสโตรคในรายการโมเดล ที่ระบุในโมเดลแสดงด้วยหน่วย ซม. (เซนติเมตร) (2) ความยาวสายเคเบิลคือระยะตั้งแต่กล่องคอนเน็กเตอร์แกน X (กรณีมีรางกระดูกงูคือนับตั้งแต่สายเคเบิลของแอคชูเอเตอร์แกน X) ไปจนถึงคอนโทรลเลอร์ มาตรฐานคือ 3 ม. หรือ 5 ม. ความยาวอื่นนอกเหนือจากนั้นสามารถใช้หน่วยเมตรได้เช่นกัน สามารถใช้ได้สูงสุด 20 ม. (3) ความเร็วเร่งจำกัดเท่ากับ 0.3G เมื่อเพิ่มความเร็วเร่ง น้ำหนักขนย้ายที่ได้จะลดลง (4) โปรดระวังว่ายิ่งสโตรคยาวยิ่งทำให้ความเร็วสูงสุดต่ำลง และกรณีนำไปใช้งานในลักษณะที่ลดแกนแนวตั้งให้ต่ำลง จะต้องลดความเร็วและความเร็วเร่งลงด้วย (5) ที่ระบุใน [ ] คือในกรณีที่เป็นโมเดลแบบสเปคความแม่นยำสูง (6) กรณีที่ Absolute Data สูญหาย จำเป็นต้องดำเนินการ Absolute Reset จิ๊กปรับ ใน Absolute Reset (รุ่น: ต้องใช้ JG-ZRM) แยก (ไม่อยู่ในตัวเครื่อง) |
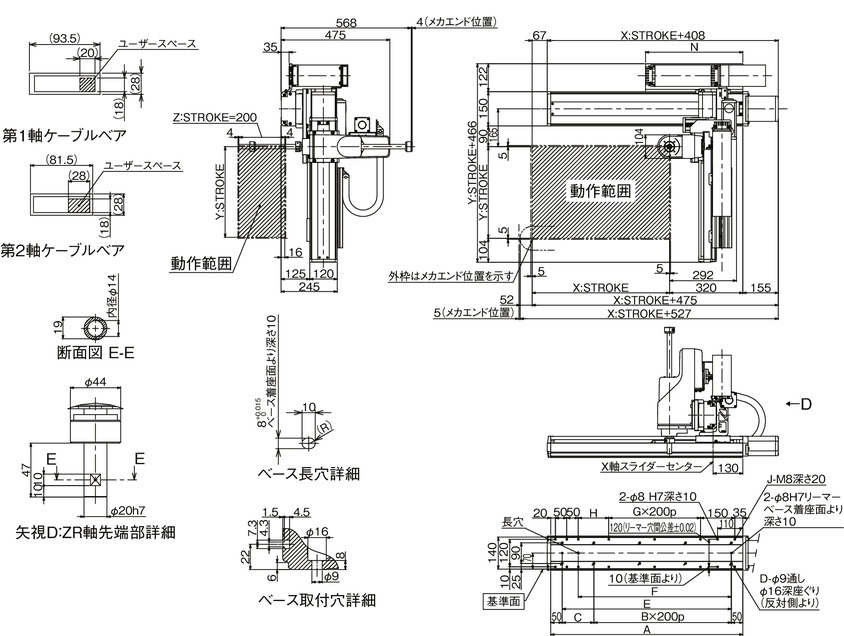
ภาพร่างแสดงขนาด

ICSB4【ICSPB4】-BE□HZRM-CT-CT (สเปครางกระดูกงู) ทิศทางการรวมเข้าด้วยกัน 1
(หมายเหตุ) ตำแหน่งรวมของในแผนผังคือตำแหน่งจุดเริ่มต้น กรณีจะเปลี่ยนจุดเริ่มต้น โปรดระบุ NM ที่เป็นอ็อปชั่นเสริม
และกรณีจะเปลี่ยนจุดเริ่มต้นหลังส่งมอบสินค้าแล้วจะต้องทำการปรับคืน จึงโปรดใช้ความระวัง
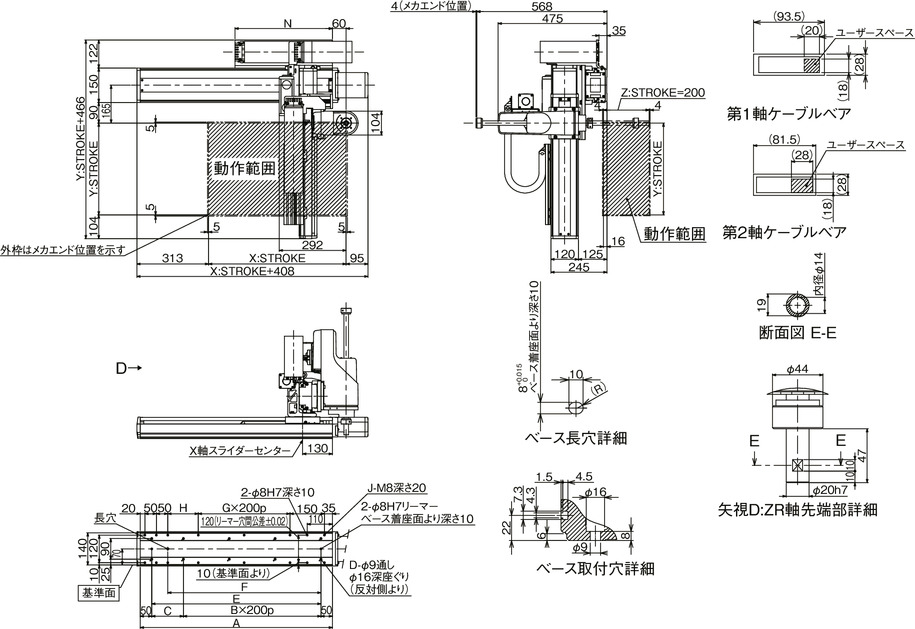
ICSB4【ICSPB4】-BE□HZRM-CT-CT (สเปครางกระดูกงู) ทิศทางการรวมเข้าด้วยกัน 3
(หมายเหตุ) ตำแหน่งรวมของในแผนผังคือตำแหน่งจุดเริ่มต้น กรณีจะเปลี่ยนจุดเริ่มต้น โปรดระบุ NM ที่เป็นอ็อปชั่นเสริม
และกรณีจะเปลี่ยนจุดเริ่มต้นหลังส่งมอบสินค้าแล้วจะต้องทำการปรับคืน จึงโปรดใช้ความระวัง
| สโตรคแกน X | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | 1100 | 1150 | 1200 | 1250 | 1300 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 538 | 588 | 638 | 688 | 738 | 788 | 838 | 888 | 938 | 988 | 1038 | 1088 | 1138 | 1188 | 1238 | 1288 | 1338 | 1388 | 1438 | 1488 | 1538 |
| B | 1 | 1 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 6 | 6 | 6 |
| C | 238 | 288 | 138 | 188 | 238 | 288 | 138 | 188 | 238 | 288 | 138 | 188 | 238 | 288 | 138 | 188 | 238 | 288 | 138 | 188 | 238 |
| D | 6 | 6 | 8 | 8 | 8 | 8 | 10 | 10 | 10 | 10 | 12 | 12 | 12 | 12 | 14 | 14 | 14 | 14 | 16 | 16 | 16 |
| E | 438 | 488 | 538 | 588 | 638 | 688 | 738 | 788 | 838 | 888 | 938 | 988 | 1038 | 1088 | 1138 | 1188 | 1238 | 1288 | 1338 | 1388 | 1438 |
| F | 368 | 418 | 468 | 518 | 568 | 618 | 668 | 718 | 768 | 818 | 868 | 918 | 968 | 1018 | 1068 | 1118 | 1168 | 1218 | 1268 | 1318 | 1368 |
| G | 0 | 0 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 5 | 5 | 5 |
| H | 233 | 283 | 133 | 183 | 233 | 283 | 133 | 183 | 233 | 283 | 133 | 183 | 233 | 283 | 133 | 183 | 233 | 283 | 133 | 183 | 233 |
| J | 10 | 10 | 12 | 12 | 12 | 12 | 14 | 14 | 14 | 14 | 16 | 16 | 16 | 16 | 18 | 18 | 18 | 18 | 20 | 20 | 20 |
| N | 275 | 300 | 325 | 350 | 375 | 400 | 425 | 450 | 475 | 500 | 525 | 550 | 575 | 600 | 625 | 650 | 675 | 700 | 725 | 750 | 775 |
สเปคร่วม
| แกน X | แกน Y | แกน Z | แกนหมุน | |
|---|---|---|---|---|
| รูปแบบการขับเคลื่อน | บอลสกรู แบบรีด C10 [เทียบเท่าแบบรีด C5] | เบลท์ + สไปลน์บอลสกรู | เบลท์+เกียร์ทดรอบ+สไปลน์ | |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.01 มม.【±0.005 มม.】 | ±0.01 มม. | ±0.005° | |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | เท่ากับหรือน้อยกว่า 0.05 มม. [เท่ากับหรือน้อยกว่า 0.02 มม.] | - | ||
| ไกด์ | แบบมีตัว Base | - | ||
| ฐาน | คุณสมบัติของวัสดุ : อลูมิเนียมชุบผิวสีขาว | - | ||
| การส่งออกของมอเตอร์/Leads | 400W/20 มม. | 200W/20 มม. | 200W/20 มม. | 200W/- |
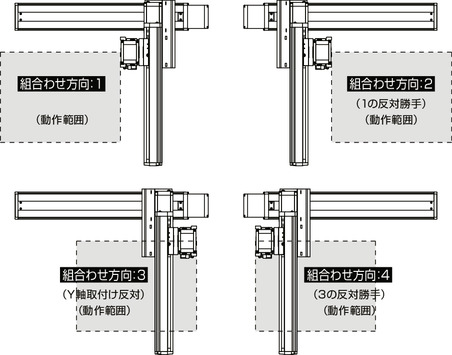
ทิศทางการรวมของ XY
รายละเอียดโมเดล
| ทิศทางการรวม XY (หมายเหตุ 1) | รูปแบบ | ||
|---|---|---|---|
| 1 | ICSB4【ICSPB4】-BE1HZRM-WA-①②-③④-⑤⑥-⑦⑧-T□-⑨-⑩ | ||
| 2 | ICSB4【ICSPB4】-BE2HZRM-WA-①②-③④-⑤⑥-⑦⑧-T□-⑨-⑩ | ||
| 3 | ICSB4【ICSPB4】-BE3HZRM-WA-①②-③④-⑤⑥-⑦⑧-T□-⑨-⑩ | ||
| 4 | ICSB4【ICSPB4】-BE4HZRM-WA-①②-③④-⑤⑥-⑦⑧-T□-⑨-⑩ | ||
(หมายเหตุ 1) สำหรับทิศทางการรวมเข้าด้วยกันของ XY กรุณาดูแผนภาพด้านล่าง กรุณาดูตารางด้านล่างสำหรับรายละเอียด 1 -10 ของรุ่นด้านบน
คำอธิบายสัญลักษณ์ในโมเดล
| เลขที่ | เนื้อหา | รายละเอียดที่ระบุ |
|---|---|---|
| ① | สโตรคแกน X | 30: 300 มม. ~ 130: 1300 มม. |
| ② | แกน X อุปกรณ์เสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ③ | สโตรคแกน Y | 20: 200 มม. ~ 70: 700 มม. |
| ④ | แกน Y อ็อปชั่นเสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ⑤ | สโตรคแกน Z | 20: 200 มม. |
| ⑥ | แกน Z อ็อปชั่นเสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ⑦ | ขอบเขตการทำงานของแกนหมุน | 36: 360 องศา |
| ⑧ | แกนหมุนอ็อปชั่นเสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ⑨ | ความยาวสายเคเบิล | 3L: 3m 5L: 5m □L: กำหนดความยาว |
| ⑩ | แกน Y - แกน Z การเดินสายเคเบิล | CT-CT: รางกระดูกงู - รางกระดูกงู |
แกนโครงสร้าง
| ชื่อเรียกแกน | รูปแบบ | หน้าสำหรับอ้างอิง |
|---|---|---|
| แกน X | ISB【ISPB】-LXM-WA-400-20-①-T2-⑪-② | 3-441 |
| แกน Y | ISB【ISPB】-MXM-WA-200-20-③-T2-⑪-④ | 3-409 |
| แกน Z / แกนหมุน | ZR-M-WA-200-20-200-T2-⑥ | 6-293 |
(ข้อควรระวัง) โมเดล 1 - 6 ข้างต้น โปรดดูสัญลักษณ์ในโมเดลที่ปรากฏในตารางข้างบน อนึ่ง สโตรคที่แสดงใช้หน่วย มม. (มิลลิเมตร)
(หมายเหตุ) ในรุ่น 11 ด้านบน จะระบุทิศทางการออกของเคเบิ้ล สำหรับทิศทางการออก กรุณาดูหน้า 5-575