
คุณสมบัติพิเศษของผลิตภัณฑ์





รูปแบบการติดตั้ง



ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | ||||
|---|---|---|---|---|---|
| Lead | Ball screw lead (มม.) | 40 | 20 | 10 | |
| แนวนอน | น้ำหนักขนย้าย | น้ำหนักโหลดสูงสุด (กก.) | 40 | 90 | 120 |
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วสูงสุด (มม./วินาที) | 1800 | 1200 | 600 | |
| พิกัดความเร็วเร่ง-ลด (G) | 0.4 | 0.4 | 0.4 | ||
| ความเร็วเร่ง-ลดสูงสุด (G) | 1 | 1 | 0.7 | ||
| แนวตั้ง | น้ำหนักขนย้าย | น้ำหนักโหลดสูงสุด (กก.) | 8 | 20 | 40 |
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วสูงสุด (มม./วินาที) | 1800 | 1200 | 600 | |
| พิกัดความเร็วเร่ง-ลด (G) | 0.4 | 0.4 | 0.4 | ||
| ความเร็วเร่ง-ลดสูงสุด (G) | 1 | 1 | 0.6 | ||
| แรงผลัก | พิกัดแรงผลัก (N) | 169.6 | 339.1 | 678.3 | |
| สเปคห้องคลีนรูม | ปริมาณสูญญากาศ (NL/min) | 180 | 120 | 50 | |
| เบรก | ข้อมูลจำเพาะของเบรก | เบรกแม่เหล็กไฟฟ้าชนิด NON-EXCITATION OPERATION | |||
| แรง Hold ของเบรก (kgf) | 8 | 20 | 40 | ||
| สโตรค | สโตรคต่ำสุด (มม.) | 100 | 100 | 100 | |
| สโตรคสูงสุด (มม.) | 1300 | 1300 | 1300 | ||
| ระยะ Pitch ของสโตรค (มม.) | 50 | 50 | 50 | ||
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | บอลสกรู φ20 มม. แบบรีด C10 [เทียบเท่า C5] |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.01 มม. [±0.003 มม.] |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ไม่เกิน 0.05 มม. [ไม่เกิน 0.02 มม.] |
| ฐาน | วัสดุ : อะลูมิเนียม ชุบผิวสีขาว |
| ลิเนียร์ไกด์ | ชนิดหมุนเวียนเคลื่อนที่เชิงเส้นแบบไม่จำกัด |
| โมเมนต์ที่ยอมรับได้แบบสถิต | Ma:560N・m |
| Mb:800N・m | |
| Mc:1325N・m | |
| โมเมนต์ที่ยอมรับได้แบบพลวัต (หมายเหตุ 5) | Ma:123N・m |
| Mb:176N・m | |
| Mc:291N・m | |
| ระดับความสะอาด | คลาส 10 (0.1 µm, Fed.Std.209D) เทียบเท่าคลาส 2.5 (มาตรฐาน ISO 14644-1) |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำ) |
| ระดับการป้องกัน | IP30 |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS |
| ชนิดมอเตอร์ | เซอร์โวมอเตอร์ AC |
| ชนิดเอนโค้ดเดอร์ | ไร้แบตเตอรี่แบบสัมบูรณ์ |
| จำนวนพัลส์เอนโค้ดเดอร์ | 131072 พัลส์/รอบ |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" |
(หมายเหตุ 5) กรณีอายุการใช้งานมาตรฐานอยู่ที่ 10,000 กม. อายุการใช้งานเคลื่อนที่ขึ้นอยู่กับเงื่อนไขการเดินเครื่องและสภาพการติดตั้ง โปรดตรวจสอบอายุการใช้งานเครื่องในหน้า 1-244
(หมายเหตุ) ตัวเลขใน [ ] ใช้สำหรับ ISPDBCR
ทิศทางโมเมนต์ชนิดสไลเดอร์

ตารางแสดงน้ำหนักขนย้ายโดยแยกตามความเร็ว - ความเร็วเร่ง
น้ำหนักขนย้ายใช้หน่วย กก. ช่องว่าง หมายถึงไม่สามารถทำงานได้
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ระยะ Lead (มม.) | ความเร็วสูงสุด (มม./วินาที) | ความเร็วเร่ง (G) | |||||||||||||||||
| 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1.0 | ||
| 40 | 1800 | 40 | 40 | 40 | 32 | 27 | 23 | 21 | 19 | 17 | 8 | 8 | 8 | 7.5 | 7 | 6.5 | 6 | 5.5 | 5 |
| 20 | 1200 | 90 | 90 | 90 | 70 | 57 | 47 | 40 | 35 | 30 | 20 | 20 | 20 | 17 | 15 | 14 | 12 | 11 | 10 |
| 10 | 600 | 120 | 120 | 120 | 92 | 73 | 60 | 40 | 40 | 40 | 35 | 30 | |||||||
สโตรคและความเร็วสูงสุด
(หน่วยเป็น มม./วินาที)
| สโตรค Lead | 100 - 650 (ทุกๆ 50 มม.) | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | 1100 | 1150 | 1200 | 1250 | 1300 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 40 | 1800 | 1700 | 1540 | 1410 | 1290 | 1185 | 1095 | 1015 | 940 | 875 | 815 | |||
| 20 | 1200 | 1165 | 1045 | 940 | 850 | 770 | 705 | 645 | 595 | 545 | 505 | 470 | 440 | 410 |
| 10 | 600 | 585 | 520 | 470 | 425 | 385 | 350 | 320 | 295 | 275 | 255 | 235 | 220 | 205 |
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกน ที่เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| RCON |  | 16 (ML3, SSN, ECM คือ 8) | DC24V เฟสเดี่ยว AC200V สามเฟส AC200V | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3, SSN, ECM ไม่มีข้อมูลตำแหน่ง) |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
| SCON-CB/CGB |  | 1 | เทียบเท่า AC200V | ● | ● | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | ● | 512 (สเปคเน็ตเวิร์คคือ 768) |
| SSEL-CS |  | 2 | เทียบเท่า AC 100V/200V | ● | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
| XSEL-P/Q |  | 6 | เทียบเท่า AC200V สามเฟส AC200V | - | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
| XSEL-RA/SA |  | 8 | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | - | - | - | 55000 (แตกต่างกันไปตามแต่ละรุ่น) | |
(หมายเหตุ) ดูหน้า 8-17 สำหรับตัวย่อเครือข่าย เช่น DV และ CC
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
| (1) เมื่อสโตรคยาวขึ้น ความเร็วสูงสุดจะลดต่ำลงอันเนื่องมาจากความเร็วรอบหมุน (ที่สูง) อาจทำให้บอลสกรูเสียหาย โปรดตรวจสอบความเร็วสูงสุดของสโตรคที่ต้องการได้จาก [สโตรคและความเร็วสูงสุด] (2) น้ำหนักขนย้ายในตาราง "ข้อมูลจำเพาะที่สำคัญ" จะระบุด้วยค่าสูงสุด รายละเอียดโปรดดูที่ "ตารางแสดงน้ำหนักขนย้ายโดยแยกตามความเร็ว - ความเร็วเร่ง" (3) เกี่ยวกับโมเมนต์แบบสัมบูรณ์ (ไดนามิก) และความยาวโหลดที่แขวนที่ยอมรับได้ เมื่อเลือกใช้สไลเดอร์คู่ ดูในหน้า 1-253 (4) ค่ามาตรฐานดิวตี้ที่สามารถใช้ได้จะแตกต่างกันไปตามเงื่อนไขการใช้งาน (มวลการขนย้าย การเร่งความเร็ว / การลดความเร็ว ฯลฯ) สำหรับรายละเอียด โปรดดูหน้า 0-000 (5) ตำแหน่งของจุดศูนย์ถ่วงของวัตถุที่ยึดควรเท่ากับหรือไม่เกิน 1/2 ของระยะยื่น แม้ระยะยื่นหรือโมเมนต์โหลดจะอยู่ในค่าที่ยอมรับได้ แต่หากเกิดเสียงหรือการสั่นสะท้านที่ผิดปกติระหว่างเครื่องทำงาน โปรดผ่อนเงื่อนไขการใช้งานลงแล้วจึงใช้งานต่อไป (6) โปรดระมัดระวังตามรูปแบบการติดตั้ง สำหรับรายละเอียด โปรดดูที่หน้า 1-261 (7) มาตรฐานความยาวของโหลดที่ยื่น ในทิศทาง Ma-Mb-Mc ต้องไม่เกิน 750 มม. โปรดดูคำอธิบายในหน้า 1-16 เกี่ยวกับความยาวของโหลดที่ยื่นออกมา |
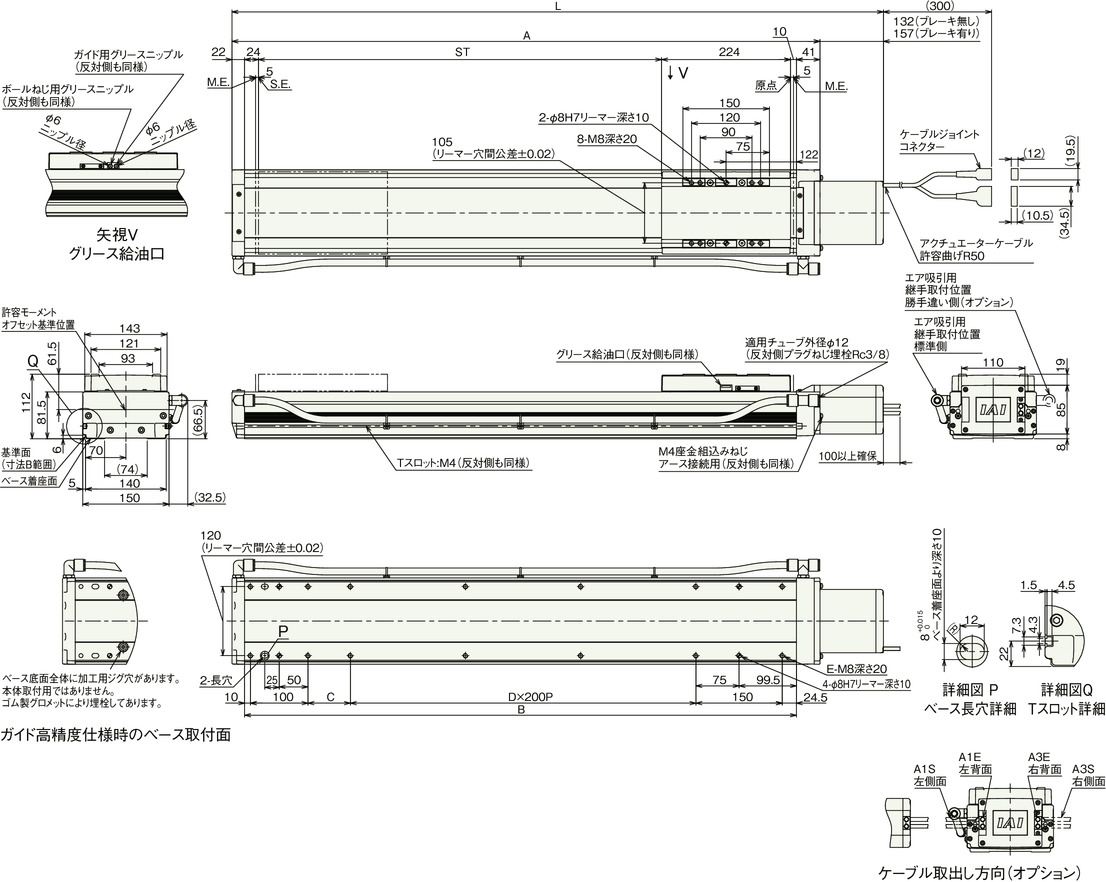
ภาพร่างแสดงขนาด

ST : สโตรค
M.E. : Mechanical end
S.E. : Stroke end
(หมายเหตุ) คอนเน็คเตอร์ข้อต่อสายเคเบิลจะเชื่อมระหว่างสายเคเบิลของมอเตอร์และสายเคเบิลของเอนโค้ดเดอร์ โปรดดูหน้า 1-115 สำหรับสายเคเบิล
(หมายเหตุ) กรณีกลับตำแหน่งเริ่มต้น สไลเดอร์จะเคลื่อนไปถึง M.E. ขอให้ระวังเนื่องจากอาจเกิดการชนกับวัตถุที่อยู่โดยรอบ
(หมายเหตุ) ในการเปลี่ยนทิศทางกลับตำแหน่งเริ่มต้นจะต้องทำการปรับการย้อนกลับ โปรดใช้ความระมัดระวัง
(หมายเหตุ) ตำแหน่งอ้างอิงโมเมนต์ออฟเซ็ตที่ยอมรับได้คือ 61.5 มม. จากตำแหน่งติดตั้งสไลเดอร์
ขนาดแยกตามสโตรค
| สโตรค | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | 1100 | 1150 | 1200 | 1250 | 1300 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | ไม่มีเบรก | 553 | 603 | 653 | 703 | 753 | 803 | 853 | 903 | 953 | 1003 | 1053 | 1103 | 1153 | 1203 | 1253 | 1303 | 1353 | 1403 | 1453 | 1503 | 1553 | 1603 | 1653 | 1703 | 1753 |
| มีเบรก | 578 | 628 | 678 | 728 | 778 | 828 | 878 | 928 | 978 | 1028 | 1078 | 1128 | 1178 | 1228 | 1278 | 1328 | 1378 | 1428 | 1478 | 1528 | 1578 | 1628 | 1678 | 1728 | 1778 | |
| A | 421 | 471 | 521 | 571 | 621 | 671 | 721 | 771 | 821 | 871 | 921 | 971 | 1021 | 1071 | 1121 | 1171 | 1221 | 1271 | 1321 | 1371 | 1421 | 1471 | 1521 | 1571 | 1621 | |
| B | 358 | 408 | 458 | 508 | 558 | 608 | 658 | 708 | 758 | 808 | 858 | 908 | 958 | 1008 | 1058 | 1108 | 1158 | 1208 | 1258 | 1308 | 1358 | 1408 | 1458 | 1508 | 1558 | |
| C | 73.5 | 123.5 | 173.5 | 23.5 | 73.5 | 123.5 | 173.5 | 23.5 | 73.5 | 123.5 | 173.5 | 23.5 | 73.5 | 123.5 | 173.5 | 23.5 | 73.5 | 123.5 | 173.5 | 23.5 | 73.5 | 123.5 | 173.5 | 23.5 | 73.5 | |
| D | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | 6 | 6 | |
| E | 8 | 8 | 8 | 10 | 10 | 10 | 10 | 12 | 12 | 12 | 12 | 14 | 14 | 14 | 14 | 16 | 16 | 16 | 16 | 18 | 18 | 18 | 18 | 20 | 20 | |
น้ำหนักแยกตามสโตรค
| สโตรค | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | 1100 | 1150 | 1200 | 1250 | 1300 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| น้ำหนัก (กก.) | ไม่มีเบรก | 12.3 | 13.1 | 14.0 | 14.8 | 15.7 | 16.6 | 17.4 | 18.3 | 19.1 | 20.0 | 20.8 | 21.7 | 22.5 | 23.4 | 24.3 | 25.1 | 26.0 | 26.8 | 27.7 | 28.5 | 29.4 | 30.2 | 31.1 | 31.9 | 32.8 |
| มีเบรก | 12.8 | 13.6 | 14.5 | 15.3 | 16.2 | 17.1 | 17.9 | 18.8 | 19.6 | 20.5 | 21.3 | 22.2 | 23.0 | 23.9 | 24.8 | 25.6 | 26.5 | 27.3 | 28.2 | 29.0 | 29.9 | 30.7 | 31.6 | 32.4 | 33.3 | |
การรับน้ำหนักและการเร่งความเร็ว / การลดความเร็วระหว่างการปรับอ้อฟบอร์ดจูนนิ่ง
| Lead | น้ำหนักขนย้ายแยกตามความเร็วเร่ง (กก.) | ความเร็วสูงสุด (มม./วินาที) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.1G | 0.2G | 0.3G | 0.4G | 0.5G | 0.6G | 0.7G | 0.8G | 0.9G | 1.0G | มาตรฐาน | หลัง tuning | ||
| แนวนอน | 40 | 52 | 48 | 44 | 40 | 32 | 27 | 23 | 21 | 19 | 17 | 1800 | 1800 |
| 20 | 117 | 108 | 99 | 90 | 70 | 57 | 47 | 40 | 35 | 30 | 1200 | 1200 | |
| 10 | 156 | 144 | 132 | 120 | 92 | 73 | 60 | 600 | 600 | ||||
น้ำหนักขนย้ายใช้หน่วย กก. ช่องว่าง หมายถึงไม่สามารถทำงานได้