คุณสมบัติพิเศษของผลิตภัณฑ์


สเปคแต่ละแบบ
| รูปแบบ | โครงสร้างแกน | ความยาวแขนกล (มม.) | ความจุ มอเตอร์ (W) | ขอบเขตการทำงาน | ความแม่นยำ ในการกำหนด ตำแหน่งทำซ้ำ (มม.) (ข้อควรระวัง 1) | ความเร็วสูงสุด ในการทำงาน ขณะทำงาน PTP (ข้อควรระวัง 2) | ไซเคิล ไทม์ มาตรฐาน (วินาที) (ข้อควรระวัง 3) | น้ำหนักขนย้าย (กก.) (ข้อควรระวัง 4) | แกนที่ 3 (แกนขึ้น-ลง) ขอบเขตการควบคุมแรงกด (N) | แกนที่ 4 โหลดที่ยอมรับได้ | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| จำกัด | สูงสุด | สูงสุด (ข้อควรระวัง 5) | ต่ำสุด (ข้อควรระวัง 5) | โมเมนท์ แรงเฉื่อย ที่ยอมรับได้ (กก.-ตร.ม.) (ข้อควรระวัง 6) | แรงบิด ที่ยอมรับได้ (N・m) | |||||||||
| IX-NNN1805-①-T2-② | 1 แกน | แขนกลที่ 1 | 105 | 12 | ± 125 องศา | ±0.01 (XY) | 2555 มม./วินาที (ความเร็วรวม) | 0.38 | 0.2 | 1.0 | 14.7 | 9.8 | 0.000386 | 0.13 |
| 2 แกน | แขนกลที่ 2 | 75 | 12 | ± 145 องศา | ||||||||||
| 3 แกน | แกนบน-ล่าง | - | 12 | 50 มม. | ±0.010 | 720 มม./วินาที | ||||||||
| 4 แกน | แกนหมุน | - | 60 | ± 360 องศา | ±0.005 | 1800 องศา/วินาที | ||||||||
คำอธิบายสัญลักษณ์①ความยาวสายเคเบิล②อุปกรณ์เสริม
สเปคแบบเพิ่มค่า
| รายการ | เนื้อหา |
|---|---|
| ชนิดเอนโค้ดเดอร์ | แบบสัมบูรณ์ |
| การเดินสายไฟของผู้ใช้ | คอนเน็กเตอร์แบบมีปลอกหุ้ม AWG26 ชนิด 8 เส้น: SMP-08V-NC (JST) |
| การเดินท่อของผู้ใช้ | เส้นผ่านศูนย์กลางภายนอก φ3 เส้นผ่านศูนย์กลางภายใน φ2 ท่ออากาศ 2 ท่อ (แรงดันคงที่ 0.7MPa) |
| ไฟแสดงการเตือน (ข้อควรระวัง 7) | ไฟแสดงสถานะ LED ขนาดเล็กสีแดง 1 ดวง (ต้องต่อแหล่งจ่ายไฟ DC 24V) |
| อุณหภูมิ-ความชื้นโดยรอบ | อุณหภูมิ 0-40 ° C ความชื้นไม่เกิน 20-85% RH (ต้องไม่มีหยดน้ำ) |
| น้ำหนักเครื่อง | 3.0 กก. |
| ความยาวสายเคเบิล (ข้อควรระวัง 9) | 3L: 3 ม. (มาตรฐาน) 5L: 5 ม. |
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกน ที่เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| XSEL-PX/QX |  | 6 | สามเฟส AC200V | - | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
| XSEL-RAX/SAX XSEL-RAXD/SAXD (สำหรับ IX) |  | 8 | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | - | - | - | 36666 (ขึ้นอยู่กับประเภท) | |
(ข้อควรระวัง) สำหรับสัญลักษณ์เรียกชื่อย่อของเน็ตเวิร์ค เช่น DV, CC โปรดดูเพิ่มเติมที่หน้า 7-17
(ข้อควรระวัง) สามารถควบคุมได้สูงสุดด้วยสกาล่า + หุ่นยนต์ 4 แกน
(ข้อควรระวัง) กรณีต้องการเชื่อมต่อสกาล่า 2 ตัว ให้เลือก XSEL-RAXD / SAXD อย่างไรก็ตาม การประกอบร่วมกันของหุ่นยนต์สกาล่าบางกรณีก็อาจไม่สามารถเชื่อมต่อได้ โปรดดูที่หน้า 7-289
มาตรฐานต่างประเทศ


(หมายเหตุ) CE มีในบางรุ่น
ข้อควรระวังในการเลือก
| (1) สำหรับ (ข้อควรระวัง 1) ถึง (ข้อควรระวัง 10) โปรดดูที่หน้า 4-675 (2) หุ่นยนต์สกาล่าไม่สามารถทำงานอย่างต่อเนื่องได้ที่ความเร็วและความเร็วเร่ง-ลดแบบเต็ม 100% สำหรับเงื่อนไขการใช้งาน โปรดดูเอกสารทางเทคนิคที่หน้า 1-507 (3) หากข้อมูล Absolute ในเอนโค้ดเดอร์สูญหาย และจำเป็นต้องทำการรีเซ็ตสัมบูรณ์ จะต้องใช้จิ๊กปรับในการตั้งค่า ดูรายละเอียดในหน้า 4-742 (4) มีออฟชั่นของหน้าแปลนต่างๆ ให้เลือกใช้งาน ดูรายละเอียดในหน้า 4-742 |
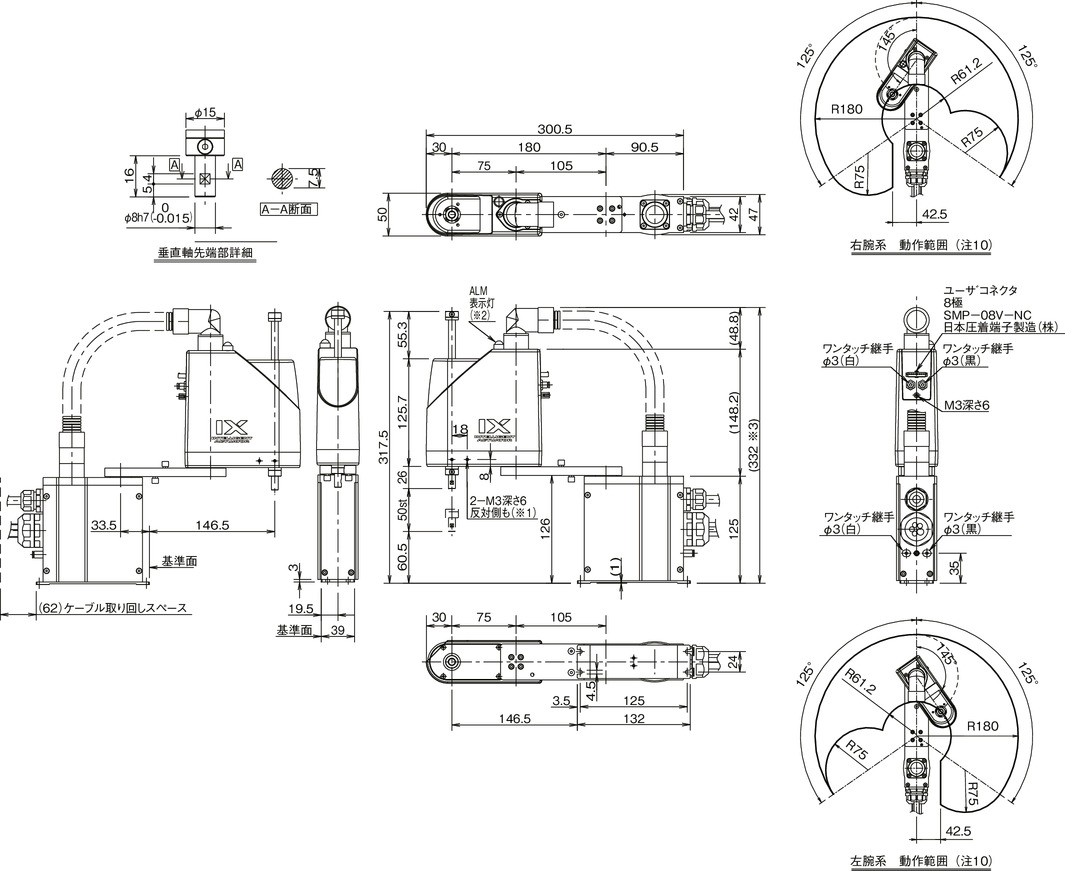
ภาพร่างแสดงขนาด

*1 2-M3 ลึก 6 เป็นแบบทะลุผ่านแขนจับ พึงระวังว่าหากสกรูยึดยาวเกินไปจะชนกับชิ้นส่วนกลไกภายในได้ โปรดใช้ความระวัง
*2 ไฟแสดงสถานะ ALM จะสว่างขึ้นเมื่อลูกค้ารับสัญญาณจากเอาต์พุต I/O ของคอนโทรลเลอร์ และต่อไฟ DC 24V เข้ากับขั้ว LED ในสายไฟของผู้ใช้
*3 ขนาดความสูงจะแตกต่างกันไป ขึ้นอยู่กับลักษณะท่าทางของแอคชูเอเตอร์ในตำแหน่งที่ระบุ ระบุค่าแนะนำสูงสุดเอาไว้