คุณสมบัติพิเศษของผลิตภัณฑ์



รูปแบบการติดตั้ง


ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | ||
|---|---|---|---|
| สเปค 4 แกน | |||
| น้ำหนักขนย้ายสูงสุด (กก.) (ข้อควรระวัง 1) | 10 | ||
| ความเร็ว (ข้อควรระวัง 2) | ความเร็วรวมสูงสุด (มม./วินาที) | 6414 | |
| ความเร็วสูงสุดของแต่ละแกน | แขนกลที่ 1 (องศา/วินาที) | 300 | |
| แขนกลที่ 2 (องศา/วินาที) | 750 | ||
| แกนบน-ล่าง (มม./วินาที) | 1600 | ||
| แกนหมุน (องศา/วินาที) | 2000 | ||
| การกด (N) (ข้อควรระวัง 3) | สูงสุด | 135 | |
| ต่ำสุด | 25 | ||
| สเปคคลีนรูม (หมายเหตุ 4) | ปริมาณการดูดซับ (NL/นาที) | 50 | |
| ความยาวแขนกล (มม.) | 600 | ||
| ความยาวแขนกลแต่ละแกน (มม.) | แขนกลที่ 1 | 350 | |
| แขนกลที่ 2 | 250 | ||
| ระยะเคลื่อนที่ของแต่ละแกน | แขนกลที่ 1 (องศา) | ±137 | |
| แขนกลที่ 2 (องศา) | ±140 | ||
| แกนบน-ล่าง (มม.) | 180/330 | ||
| แกนหมุน (องศา) | ±360 | ||
| รายการ | เนื้อหา | |
|---|---|---|
| สเปค 4 แกน | ||
| ความแม่นยำในการทำซ้ำตำแหน่ง (ข้อควรระวัง 5) | ในระนาบแนวนอน | ±0.01 มม. |
| แกนบน-ล่าง | ±0.01 มม. | |
| แกนหมุน | ±0.005 องศา | |
| การเดินสายไฟของผู้ใช้ | 10 คอร์ (9 คอร์ + ชีลด์) AWG24 (พิกัด 30V/MAX1A) | |
| การเดินท่อของผู้ใช้ | สายท่อลม 3 เส้น เส้นผ่านศูนย์กลางภายนอก φ6 เส้นผ่านศูนย์กลางภายใน φ4 (แรงดันใช้งานสูงสุด 0.6MPa) | |
| ไฟ LED (หมายเหตุ 6) | ต้องใช้ไฟแสดงผลรุ่นเล็ก LED สีเหลือง 1 ดวง แหล่งจ่ายไฟ 24V DC | |
| สวิตช์ปลดเบรก (หมายเหตุ 7) | สวิตช์ปลดเบรกสำหรับป้องกันการตกของแกนขึ้น-ลง | |
| แกนที่ส่วนปลาย | แรงบิดที่ยอมรับได้ | 3.2N・m |
| โมเมนต์ของโหลดที่ยอมรับได้ | 8.3N・m | |
| ระดับความสะอาด | คลาส 3 (ISO14644-1) | |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40 ℃, ไม่เกิน 20-85% RH (ต้องไม่มีหยดน้ำ) | |
| ระดับการป้องกัน | IP40 | |
| ทนการสั่นสะเทือน - ทนการกระแทก | ไม่มีการสั่นสะเทือนหรือการกระแทก | |
| เสียงรบกวน (หมายเหตุ 8) | น้อยกว่าหรือเท่ากับ 80dB | |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS | |
| ชนิดมอเตอร์ | เซอร์โวมอเตอร์ AC | |
| ความจุมอเตอร์ | แขนกลที่ 1 | 750W |
| แขนกลที่ 2 | 400W | |
| แกนบน-ล่าง | 200W | |
| แกนหมุน | 100W | |
| ชนิดเอนโค้ดเดอร์ | ไร้แบตเตอรี่แบบสัมบูรณ์ | |
| จำนวนพัลส์เอนโค้ดเดอร์ | 131,072 พัลส์/รอบ | |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" | |
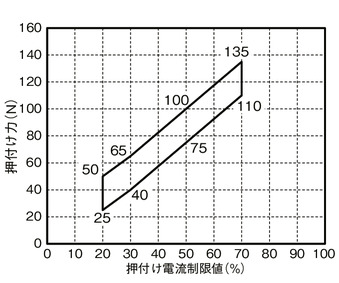
แผนภาพความสัมพันธ์ของแรงกดและค่าขีดจำกัดของกระแส (ค่าอ้างอิง)
คือแรงกดที่ส่วนปลายของแกนแนวตั้ง (หมายเหตุ 3)
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกนที่ เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| XSEL-RAX4/SAX4 (ใช้สำหรับ IXA) |  | 4 | สามเฟส AC200V | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | - | - | - | 36666 |
(หมายเหตุ) ดูหน้า 8-15 สำหรับตัวย่อเครือข่าย เช่น DV และ CC
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
| (1) สำหรับ (หมายเหตุ 1) - (หมายเหตุ 8) กรุณาดูหน้า 7-394 (2) ความเร็วเร่ง-ลด ค่ากำหนดสูงสุดจะเปลี่ยนแปลงตามน้ำหนักของวัตถุที่จะขนส่ง ระยะทางที่เคลื่อนที่ และตำแหน่ง นอกจากนี้ หากใช้งานแบบต่อเนื่องด้วยการตั้งค่าตัวเลขสูงสุด อาจเกิด Overload Error ขึ้นได้ เมื่อทำงานต่อเนื่อง กรุณากำหนดลดค่าความเร็วเร่ง-ลด หรือกำหนดเวลาหยุดหลังจากความเร็วเร่ง-ลดความเร็วโดยใช้ Duty cycle (เกณฑ์) อ้างอิง (3) หุ่นยนต์สกาล่า ไม่สามารถทำงานอย่างต่อเนื่องที่ความเร็วและความเร็วเร่ง 100% สำหรับเงื่อนไขการใช้งาน โปรดดูที่หน้า "คำแนะนำสำหรับการตั้งค่าความเร็วเร่ง-ลด" (4) สำหรับมาตรฐานความสะอาด กรุณาดูหน้า 7-61 (5) เมื่อเปลี่ยนระบบแขน อาร์มจะยืดเป็นเส้นตรง กรุณาระมัดระวังไม่ให้รบกวนอุปกรณ์ต่อพ่วง |
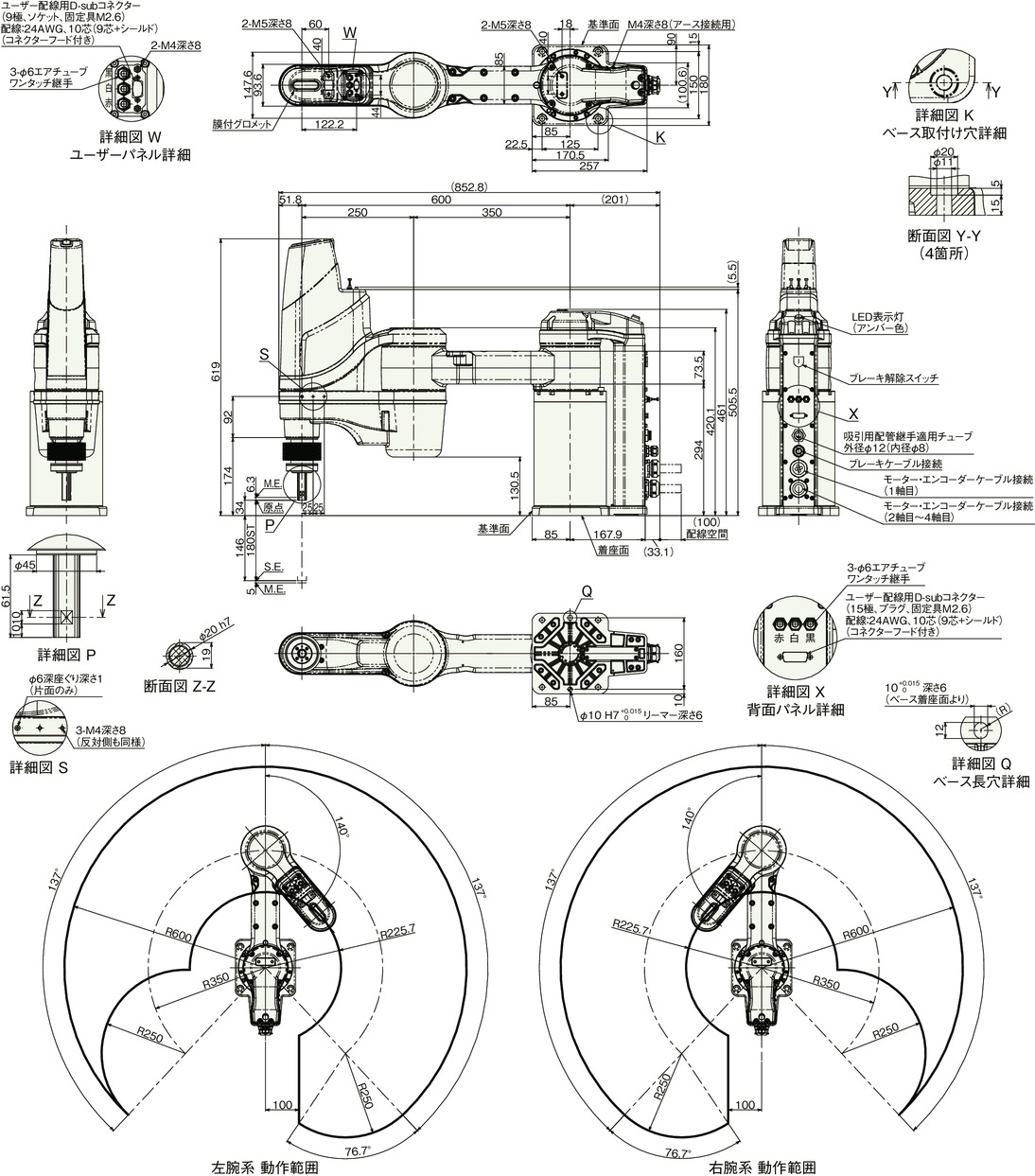
ภาพร่างแสดงขนาด

IXA-4NSC6018
ST: สโตรค
M.E.: จุดสิ้นสุดเมคานิคัล
S.E.: จุดสิ้นสุดสโตรค
(หมายเหตุ) เกี่ยวกับการเชื่อมต่อเคเบิ้ล กรุณาดูหน้า 7-394 (หมายเหตุ 9)
น้ำหนักมวลสาร
| รายการ | เนื้อหา |
|---|---|
| น้ำหนักมวลสาร | 33.5 กก. |
IXA-4NSC6033
ST: สโตรค
M.E.: จุดสิ้นสุดเมคานิคัล
S.E.: จุดสิ้นสุดสโตรค
(หมายเหตุ) เกี่ยวกับการเชื่อมต่อเคเบิ้ล กรุณาดูหน้า 7-394 (หมายเหตุ 9)

น้ำหนักมวลสาร
| รายการ | เนื้อหา |
|---|---|
| น้ำหนักมวลสาร | 34.0 กก. |
ระยะเวลาการทำงาน
| รายการ | ชม. |
|---|---|
| ไซเคิลไทม์มาตรฐาน | 0.27 วินาที |
| ไซเคิลไทม์ต่อเนื่อง | 0.48 วินาที |
ไซเคิลไทม์มาตรฐาน / ต่อเนื่อง แสดงถึงเวลาที่ต้องใช้เมื่อตั้งค่าการทำงานไป-กลับด้วยความเร็วสูงสุดภายใต้เงื่อนไขด้านล่างนี้
การส่งผ่าน 2 กก., การเคลื่อนที่ในแนวตั้ง 25 มม., การเคลื่อนที่ในแนวนอน 300 มม. (การเคลื่อนที่แบบโค้งในตำแหน่งอย่างหยาบ)
[ไซเคิลไทม์มาตรฐาน]
เป็นเวลาที่ต้องใช้เมื่อทำงานด้วยความเร็วสูงสุด โดยทั่วไปจะเป็นค่าแนะนำเพื่อให้ได้สมรรถนะแบบความเร็วสูง
พึงระวังว่าจะไม่สามารถทำงานอย่างต่อเนื่องด้วยความเร็วสูงสุดได้
[ไซเคิลไทม์ต่อเนื่อง]
เป็นไซเคิลไทม์ในกรณีที่ทำงานแบบต่อเนื่อง

โมเมนต์ความเฉื่อยที่ยอมรับของแกนส่วนปลาย
| จำนวนแกน | โมเมนต์ความเฉื่อยที่ยอมรับของแกนส่วนปลาย |
|---|---|
| สเปค 4 แกน | 0.12 kg・m2 |
คือค่าพิกัดของโมเมนต์ความเฉื่อยที่ยอมรับเมื่อแปลงเป็นจุดรวมศูนย์ของแกนปลาย (แกนหมุน) ของหุ่นยนต์สกาล่า ปริมาณออฟเซ็ตจากจุดศูนย์กลางของแกนปลายถึงจุดศูนย์ถ่วงของเครื่องมือให้เป็นตามค่าต่อไปนี้ กรณีที่จุดศูนย์ถ่วงของเครื่องมือเคลื่อนออกจากจุดศูนย์กลางของแกนปลาย ต้องลดความเร็วและความเร่งให้เหมาะสม ความยาวของระยะยื่นจะถูกจำกัดด้วยโหลดและเงื่อนไขการใช้งาน
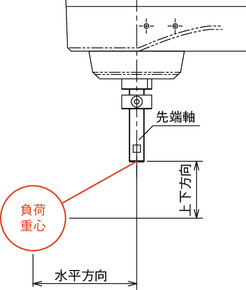
| ทิศทางแนวนอน | ทิศทางแนวขึ้น-ลง |
|---|---|
| ไม่เกิน 180 มม. | ไม่เกิน 100 มม. |
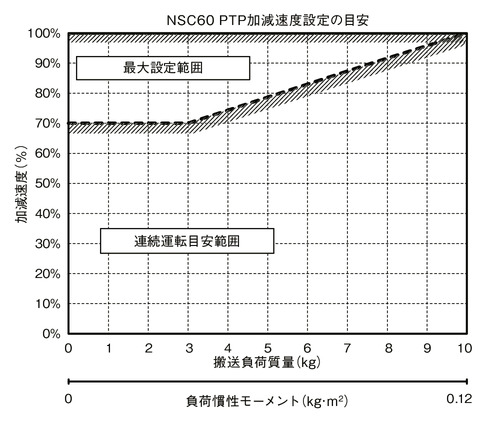
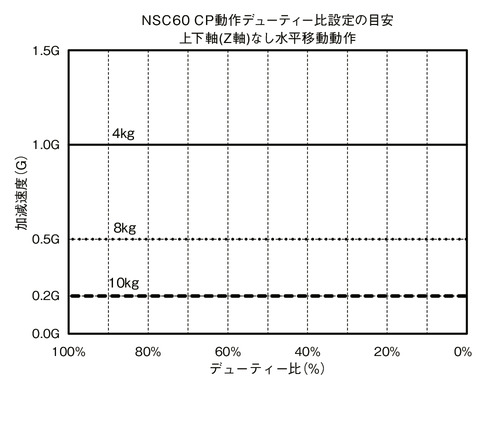
ค่าแนะนำสำหรับการตั้งค่าความเร็วเร่ง-ลด
หุ่นยนต์สกาล่า IXA ไม่สามารถทำงานได้อย่างต่อเนื่องที่ความเร็วเร่ง-ลดสูงสุดและความเร็วสูงสุดตามที่ระบุในแค็ตตาล็อก กรณีที่ทำงานด้วยความเร็วเร่ง-ลดสูงสุด กรุณาตั้งเวลาหยุดโดยอ้างอิงจากกราฟเกณฑ์ Duty cycle สำหรับการทำงานต่อเนื่อง หากจำเป็นต้องใช้งานต่อเนื่อง จะต้องตั้งค่าความเร็วเร่ง-ลดให้อยู่ในช่วงการทำงานแบบต่อเนื่องตามที่แนะนำในกราฟแสดงการตั้งค่าความเร็วเร่ง-ลด
(1) สำหรับการทำงาน PTP จะต้องใช้คำสั่ง WGHT บนโปรแกรมเพื่อตั้งค่าน้ำหนักและโมเมนต์แรงเฉื่อยก่อนใช้งานเสมอ สกาล่าสามารถทำความเร็วเร่ง-ลดสูงสุดได้ 100% ในการทำงานในแต่ละน้ำหนักขนย้าย พึงระวังว่าแม้จะตั้งค่าความเร็วเร่ง-ลด หรือความเร็วเท่ากัน หากน้ำหนักขนย้ายแตกต่างกัน เวลาที่ใช้ในการทำงานก็จะแตกต่างกันออกไปด้วย
(2) โปรดปรับความเร็วเร่ง-ลดโดยค่อยๆ เพิ่มตัวเลขตั้งค่าจากค่าแนะนำกรณีทำงานแบบต่อเนื่อง
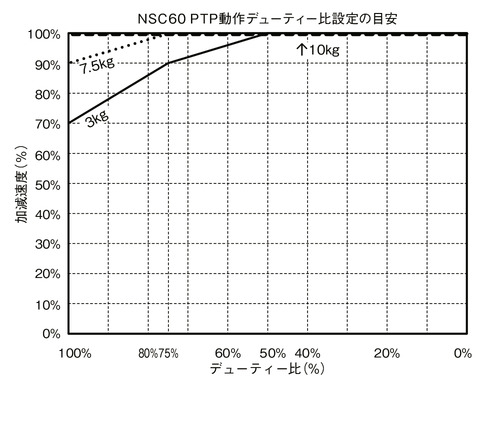
(3) กรณีที่เกิดข้อผิดพลาดเนื่องจากบรรทุกเกิน ให้ลดความเร็วเร่งอย่างเหมาะสม หรือปรับเปลี่ยนโดยตั้งเวลาหยุดโดยอ้างอิงจากกราฟเกณฑ์ Duty cycle สำหรับการทำงานต่อเนื่อง
(4) Duty Cycle (%) = (เวลาทำงาน / (เวลาทำงาน + เวลาหยุด)) × 100
(5) กรณีที่ต้องการให้หุ่นยนต์เคลื่อนที่ในแนวนอนด้วยความเร็วสูง กรุณาให้ทำงานโดยให้แกนแนวตั้งใกล้กับปลายส่วนที่สูงมากที่สุด
(6) ตั้งค่าโมเมนต์แรงเฉื่อยและน้ำหนักขนย้ายอย่าให้เกินค่าที่ยอมรับได้
(7) น้ำหนักขนย้ายบ่งชี้ถึงโมเมนต์ความเฉื่อยและน้ำหนักรอบแกนหมุน
(8) โปรดใช้งานหุ่นยนต์ด้วยความเร็วเร่ง-ลดที่เหมาะสมกับน้ำหนักและโมเมนต์แรงเฉื่อย การไม่ปฏิบัติตามจะส่งผลให้อายุการใช้งานสั้นลง เกิดความเสียหาย และการสั่นสะเทือนของชุดขับเคลื่อน
(9) หากโมเมนต์แรงเฉื่อยของโหลดมีมาก ในบางตำแหน่งของแกนแนวตั้ง (ขึ้น-ลง) อาจเกิดการสั่นสะเทือน หากเกิดการสั่นสะเทือนให้ชะลอความเร็วเร่ง-ลดตามความเหมาะสม
การทำงาน PTP
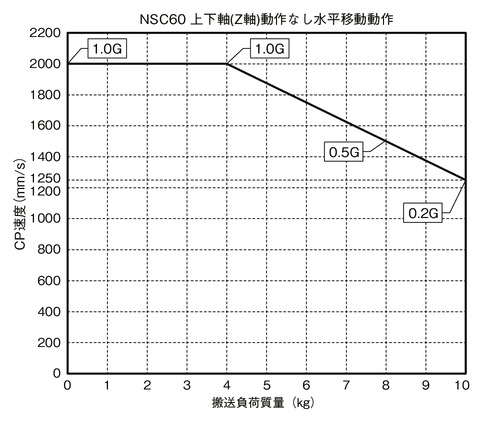
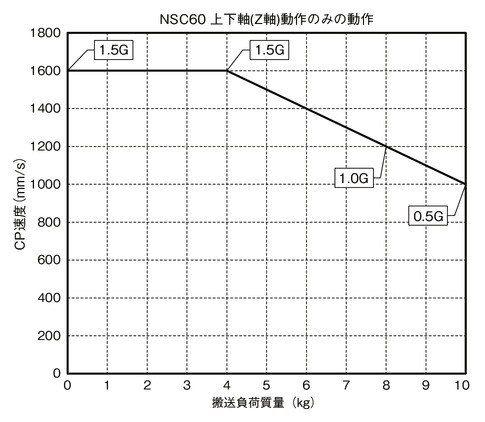
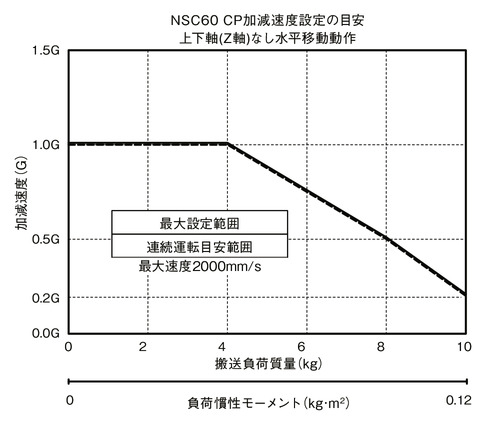
การทำงาน CP
แนวนอน
ขึ้น-ลง
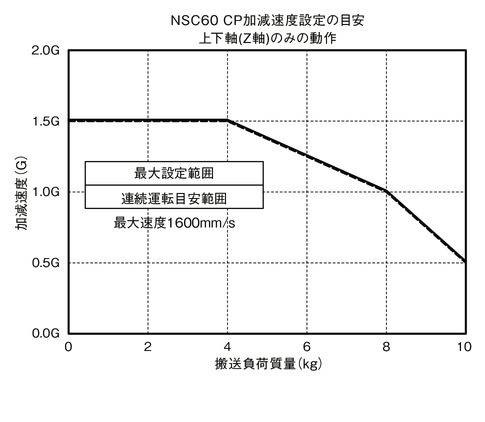
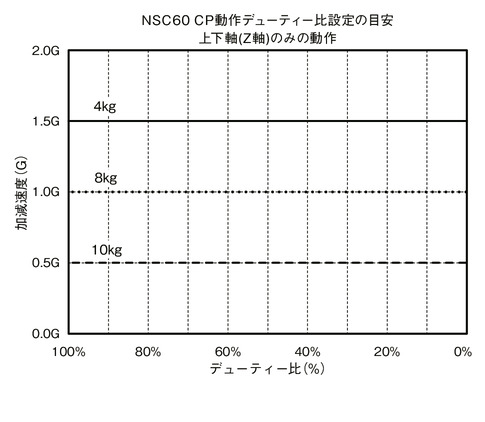
ค่าขีดจำกัดของความเร็ว - ความเร็วเร่ง-ลดของการทำงาน CP