
คุณสมบัติพิเศษของผลิตภัณฑ์


รูปแบบการติดตั้ง


สเปคของแอคชูเอเตอร์
| รูปแบบ | ระยะ Lead (มม.) | น้ำหนักขนย้ายสูงสุด | แรงกดย้ำสูงสุด (นิวตัน) | สโตรค (มม.) | |
|---|---|---|---|---|---|
| แนวนอน (กก.) | แนวตั้ง (กก.) | ||||
| RCP2-RA2C-I-20P-1-①-②-③-④ | 1 | 7 | 2.5 | 100 | 25 - 100 (ทุกๆ 25 มม.) |
อธิบายสัญลักษณ์ 1 สโตรค 2 คอนโทรลเลอร์ที่ใช้ด้วยกันได้ 3 ความยาวสายเคเบิล 4 อุปกรณ์เสริม
| สโตรค Lead | 25 - 100 (ทุกๆ 25 มม.) |
|---|---|
| 1 | 25 |
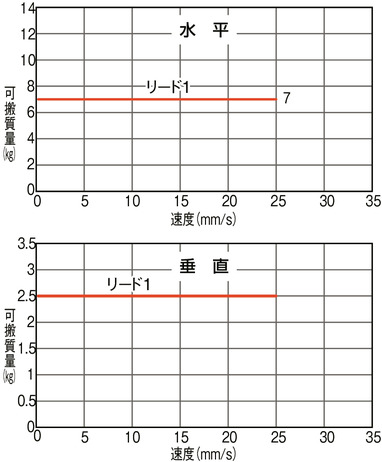
(หน่วยเป็น มม./วินาที)
ภาพแสดงความสัมพันธ์ระหว่างความเร็วกับน้ำหนักขนย้าย
ซีรี่ส์ RCP2 หากความเร็วเพิ่มสูงขึ้นเกินกว่าสมรรถนะของพัลส์มอเตอร์ น้ำหนักขนย้ายจะลดลง โปรดตรวจสอบว่าความเร็วและน้ำหนักขนย้ายจากตารางด้านล่างตรงตามที่ต้องการหรือไม่
สเปคแบบเพิ่มค่า
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | บอลสกรู φ6 มม. แบบรีด C10 + เครื่องลดความเร็ว (อัตราการลดความเร็ว 1/2) (ข้อควรระวัง 1) |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.02 มม. |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ไม่เกิน 0.1 มม. |
| เส้นผ่านศก. ของก้าน (Rod) | φ12 มม. |
| ความแม่นยำในการหมุนของก้าน (Rod) | ±2.1 องศา |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำควบแน่น) |
(ข้อควรระวัง 1) บอลสกรูและเครื่องลดความเร็วเชื่อมต่อกันโดยตรง
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกนที่ เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MCON-C/CG |  | 8 | DC24V | - | - | - | ● | ● | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | 256 |
| MCON-LC/LCG |  | 6 | - | - | ● | ● | ● | - | ● | ● | - | - | ● | ● | ● | - | - | 256 | |
| MSEL-PC/PG |  | 4 | เฟสเดี่ยว AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● *เลือก | ● *เลือก | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (สเปคเน็ตเวิร์คคือ 768) |
| PCON-CYB/PLB/POB |  | 1 | ● *เลือก | ● *เลือก | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 | - | - | - | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 128 | |
| PSEL-CS |  | 2 | ● | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 1500 | |
(หมายเหตุ) สำหรับเน็ตเวิร์คที่กำกับไว้ด้วยสัญลักษณ์ตัวย่อ เช่น DV, CC โปรดตรวจสอบที่หน้า 6-13
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
| (1) ซีรี่ส์ RCP2 มีการใช้งานพัลส์มอเตอร์ ดังนั้นหากใช้ความเร็วสูงน้ำหนักขนย้ายจะลดลง โปรดตรวจสอบน้ำหนักขนย้ายของความเร็วที่ต้องการได้จาก "ภาพแสดงความสัมพันธ์ระหว่างความเร็วกับน้ำหนักขนย้าย" (2) น้ำหนักขนย้ายคือค่าตัวเลขเมื่อทำงานที่ความเร็วเร่ง 0.05G และความเร็วเร่งคือค่าสูงสุด และน้ำหนักขนย้ายในแนวนอน คือกรณีที่มีการใช้งานไกด์ภายนอกร่วม หากมีแรงกระทำจากภายนอก นอกเหนือไปจากในทิศทางเคลื่อนที่ของก้าน (Rod) อาจเกิดความเสียหายกับตัวล็อคการหมุนได โปรดใช้ความระมัดระวัง (3) สำหรับการใช้งานแบบกดชิ้นงาน โปรดศึกษาจากแคตตาล็อค 2017 หน้า 1-387 (4) แม้จะใช้งานด้วยแอ็บโซลูทอย่างง่าย คอลัมน์ของประเภทเอนโค้ดเดอร์ในรายการแสดงรุ่นก็จะเป็น [I] (5) การติดตั้งในแต่ละลักษณะทิศทาง โปรดใช้ความระมัดระวัง รายละเอียดโปรดดูที่หน้า 1-379 (6) ตอนเชื่อมต่อ RCON จะต้องใช้ชุดแปลง (Convert unit) หรือสายเคเบิลแปลง (Convert Cable) โปรดศึกษารายละเอียดเพิ่มเติมได้จากโฮมเพจ |
ภาพร่างแสดงขนาด

ME : เมคคานิคัลเอน
SE : สโตรคเอน
*1 เชื่อมต่อมอเตอร์และเอนโค้ดเดอร์ รายละเอียดของสายเคเบิล โปรดดูที่หน้า 1-291
*2 กรณีกลับตำแหน่งเริ่มต้น ก้าน (Rod) จะเคลื่อนที่ไปถึง ME โปรดระวังการชนกับวัตถุโดยรอบ
(ข้อควรระวัง) โปรดทราบว่า ตามโครงสร้างแล้ว RA2C ไม่สามารถใช้สเปคแบบกลับด้านตำแหน่งเริ่มต้นได้
(ข้อควรระวัง) อย่าให้มีแรงภายนอกมากระทำกับตัวก้าน (Rod) นอกเหนือไปจากในทิศทางเคลื่อนที่ของก้าน (Rod) หากมีแรงมากระทำกับก้าน (Rod) ในทิศทางทำมุมฉากหรือในทิศทางหมุน ตัวหยุดหมุนอาจเกิดความเสียหายได้
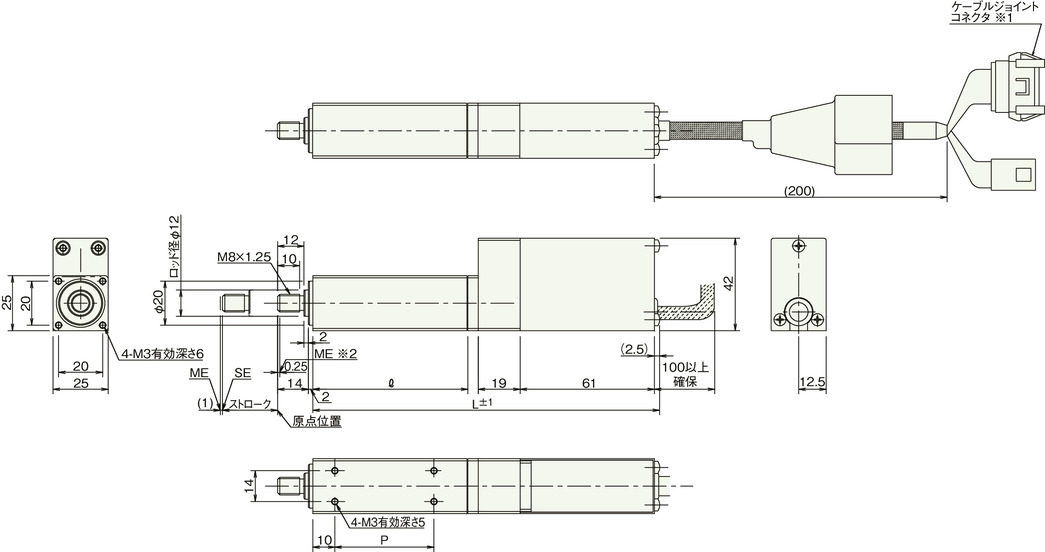
ขนาดมิติและมวลแยกตามสโตรค
| สโตรค | 25 | 50 | 75 | 100 |
|---|---|---|---|---|
| ℓ | 70 | 95 | 120 | 145 |
| L | 157.5 | 182.5 | 207.5 | 232.5 |
| P | 45 | 70 | 95 | 120 |
| น้ำหนัก (กก.) | 0.4 | 0.5 | 0.6 | 0.7 |