
คุณสมบัติพิเศษของผลิตภัณฑ์



รูปแบบการติดตั้ง



ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | ||
|---|---|---|---|
| อัตราส่วนการลดความเร็ว | 1/20 | 1/30 | |
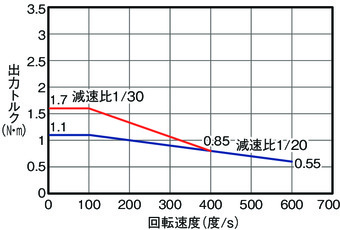
| แรงบิดสูงสุด (N・m) | 1.1 | 1.7 | |
| ความเร็ว/ความเร็วเร่ง-ลด (หมายเหตุ 1) | ความเร็วสูงสุด (องศา/วินาที) | 600 | 400 |
| พิกัดความเร็วเร่ง-ลด (G) | 0.3 | 0.3 | |
| ความเร็วเร่ง-ลดสูงสุด (G) | 0.3 | 0.3 | |
| สเปคห้องคลีนรูม | ปริมาณสูญญากาศ (Nl/min) | 15 | |
| เบรก | ข้อมูลจำเพาะของเบรก | เบรกแม่เหล็กไฟฟ้าชนิด NON-EXCITATION OPERATION | |
| แรงบิดในการโฮลด์เบรก (N・m) | 0.4 | ||
| ขอบเขตการเคลื่อนที่ (องศา) | สเปคการหมุน 330 องศา | 330 | |
| สเปคการหมุนหลายรอบ 360 องศา | 360 | ||
(หมายเหตุ 1) 1G ≒ 9807 องศา/s2
| รายการ | เนื้อหา | |
|---|---|---|
| รูปแบบการขับเคลื่อน | ไฮปอยด์เกียร์ | |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.01 องศา | |
| วิธีการย้อนกลับจุดเริ่มต้น | สเปคการหมุน 330 องศา | ระบบแมคคานิคสต๊อปเปอร์ |
| สเปคการหมุนหลายรอบ 360 องศา | ระบบพร็อกซิมิตี้เซ็นเซอร์ | |
| ความแม่นยำในการกลับจุดเริ่มต้น | สเปคการหมุน 330 องศา | ไม่เกิน ± 0.01 องศา |
| สเปคการหมุนหลายรอบ 360 องศา | ไม่เกิน ±0.05 องศา | |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ±0.1 องศา | |
| แรงขับโหลดที่ยอมรับได้ | 50N | |
| โมเมนต์ของโหลดที่ยอมรับได้ | 3.9N・m | |
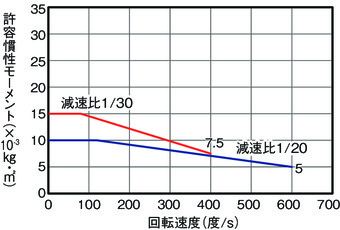
| โมเมนต์ความเฉื่อยที่ยอมรับได้ | อัตราส่วนการลดความเร็ว 1/20 | 0.01kg・m2 |
| อัตราส่วนการลดความเร็ว 1/30 | 0.015kg・m2 | |
| ระดับความสะอาด | คลาส 10 (0.1 µm, Fed.Std.209D) เทียบเท่าคลาส 2.5 (มาตรฐาน ISO 14644-1) | |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำ) | |
| ระดับการป้องกัน | - | |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 | |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS | |
| ชนิดมอเตอร์ | พัลส์มอเตอร์ | |
| ชนิดเอนโค้ดเดอร์ | แบบเพิ่มค่า (Incremental) | |
| จำนวนพัลส์เอนโค้ดเดอร์ | 800 พัลส์/รอบ | |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" | |
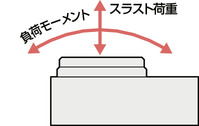
ทิศทางโมเมนต์ชนิดโรตารี่
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกน ที่เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MSEL-PC/PG |  | 4 | เฟสเดี่ยว AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● *เลือก | ● *เลือก | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (สเปคเน็ตเวิร์คคือ 768) |
| PCON-CYB/PLB/POB |  | 1 | ● *เลือก | ● *เลือก | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 (ML3, SSN, ECM คือ 8) | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3, SSN, ECM ไม่มีข้อมูลตำแหน่ง) | |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(หมายเหตุ) ดูหน้า 8-17 สำหรับตัวย่อเครือข่าย เช่น DV และ CC
(ข้อควรระวัง) โหมดดัชนีแกนหมุนไม่สามารถใช้กับ ML3, SSN และ ECM ได้
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
| (1) แรงบิดเอาต์พุตจะลดลงเมื่อความเร็วในการหมุนเพิ่มขึ้น สำหรับรายละเอียด โปรดดู "แผนภาพสหสัมพันธ์ของความเร็ว แรงบิดเอาต์พุต และโมเมนต์ความเฉื่อยที่ยอมรับได้" (2) โมเมนต์ความเฉื่อยที่ยอมรับได้ของชิ้นงานที่จะหมุนขึ้นอยู่กับความเร็วในการหมุน สำหรับรายละเอียด โปรดดู "แผนภาพสหสัมพันธ์ของความเร็ว แรงบิดเอาต์พุต และโมเมนต์ความเฉื่อยที่ยอมรับได้" (3) คอนโทรลเลอร์อาจไม่สามารถควบคุมสเปคของการหมุนหลายรอบ 360 องศาในอินเด็กซ์โหมด (index mode) ได้ สำหรับรายละเอียด โปรดดู "หมายเหตุเกี่ยวกับการผสมผสานระหว่างโหมดการทำงานและคอนโทรลเลอร์" (4) เบรกมีไว้สำหรับจับ ห้ามใช้เพื่อวัตถุประสงค์ในการเบรก/หยุดฉุกเฉิน (5) ความเฉื่อยที่ยอมรับได้และแรงบิดของเบรกที่ยอมรับได้นั้นไม่เข้ากันเสมอไป ตรวจสอบให้แน่ใจว่าแรงบิดของโหลดน้อยกว่าหรือเท่ากับแรงบิดในการยึด (6) แม้จะใช้งานด้วยแอ็บโซลูทอย่างง่าย คอลัมน์ของประเภทเอนโค้ดเดอร์ในรายการแสดงรุ่นก็จะเป็น [I] |
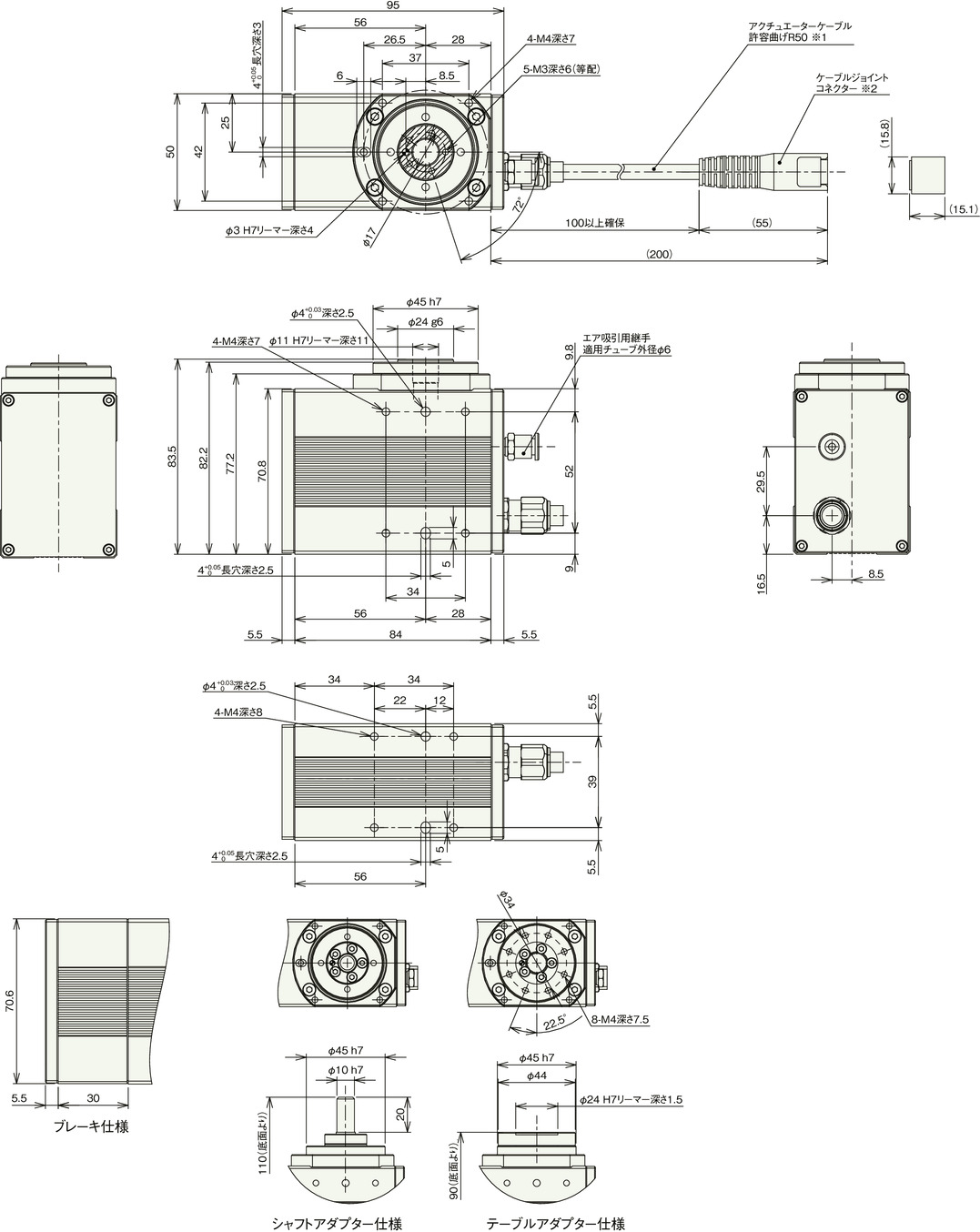
ภาพร่างแสดงขนาด

*1 สายเคเบิลแอชูเอเตอร์คือสายเคเบิลของหุ่นยนต์
*2 ต่อสายมอเตอร์/เอนโค้ดเดอร์เข้ากับขั้วต่อข้อต่อสาย
(หมายเหตุ) ในแผนผังด้านล่าง พื้นที่แรเงาคือส่วนที่หมุนได้
(หมายเหตุ) ทั้งสเปคมาตรฐานและสเปคการหมุนย้อนกลับ (ตัวเลือก) ตำแหน่งเริ่มต้นคือตำแหน่งของส่วนที่หมุนในแผนผังด้านล่าง
เมื่อกลับไปยังตำแหน่งเริ่มต้น ตามเกณฑ์มาตรฐาน เมื่อมองจากด้านบนจะหมุนไปทางซ้าย เพื่อกลับไปยังจุดเริ่มต้น และหลังจากที่กลับไปยังจุดเริ่มต้นแล้ว เครื่องจะทำงานโดยหมุนไปทางขวา
ในสเปคการหมุนย้อนกลับ เครื่องจะหมุนไปทางขวาเพื่อกลับไปยังจุดเริ่มต้น และหลังจากที่กลับไปยังจุดเริ่มต้นแล้ว เครื่องจะทำงานโดยหมุนไปทางซ้าย
โปรดทราบว่าในเชิงโครงสร้างไม่สามารถที่จะเปลี่ยนทิศทางการหมุนหลังการขนส่งได้
น้ำหนักมวลสาร
| รายการ | เนื้อหา | |
|---|---|---|
| น้ำหนักมวลสาร | ไม่มีเบรก | 0.96 กก. |
| มีเบรก | 1.3 กก. | |
แผนภาพสหสัมพันธ์ของความเร็ว แรงบิดเอาต์พุต และโมเมนต์ความเฉื่อยที่ยอมรับได้
แผนภาพสหสัมพันธ์ระหว่างความเร็วการหมุนและแรงบิดเอาต์พุต
แผนภาพสหสัมพันธ์ของความเร็วในการหมุนและโมเมนต์ความเฉื่อยที่ยอมรับได้
วิธีการย้อนกลับตำแหน่งเริ่มต้นและทิศทางการหมุนไปข้างหน้า
ข้อมูลจำเพาะ การหมุน 330 องศา
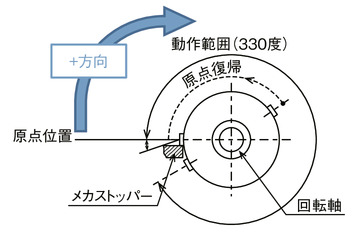
เมื่อมองจากด้านบนของส่วนที่หมุน การหมุนตามเข็มนาฬิกาจะเป็นทิศทาง +
การกลับไปยังตำแหน่งเริ่มต้นจะหมุนทวนเข็มนาฬิกา
ตรวจจับตำแหน่งของตัวหยุดกลไก ย้อนกลับการทำงาน แล้วหยุด
การกลับไปยังตำแหน่งเริ่มต้นจะไม่สามารถหมุนตามเข็มนาฬิกา
ข้อมูลจำเพาะ การหมุนหลายรอบ 360 องศา
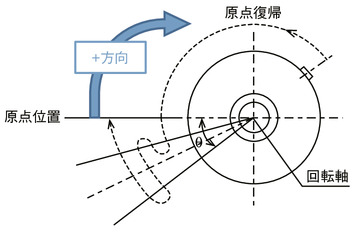
เมื่อมองจากด้านบนของส่วนที่หมุน การหมุนตามเข็มนาฬิกาจะเป็นทิศทาง +
การกลับไปยังตำแหน่งเริ่มต้นจะหมุนทวนเข็มนาฬิกา
หลังจากตรวจจับเซ็นเซอร์และเครื่องทำงานในช่วง θ (หมายเหตุ 2) เซ็นเซอร์จะหยุดทำงาน
(หมายเหตุ 2) ช่วงระยะการย้อนกลับตำแหน่งเริ่มต้น θ: ประมาณ 30 องศา
จะมีความแตกต่างกันเล็กน้อยขึ้นอยู่กับระยะการตรวจจับของเซ็นเซอร์ต้นทาง โปรดใช้เป็นแนวทาง
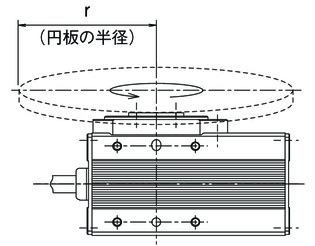
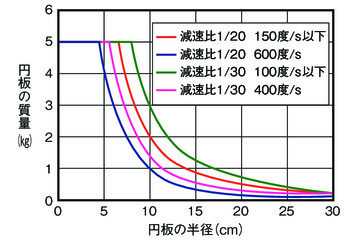
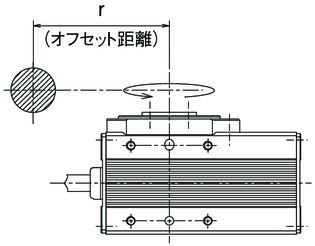
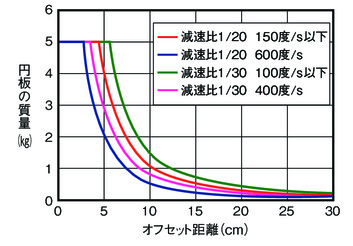
ค่ามาตรฐานของรูปร่างและมวลของโหลด
กรณีจุดศูนย์กลางของโหลดรูปดิสก์เป็นจุดศูนย์กลางของเพลาส่งออก
กรณีโหลดมีอ้อฟเซตจากศูนย์กลางของเพลาส่งออก
ข้อควรระวังสำหรับโหมดการทำงานและตัวควบคุมร่วมกัน
ไม่สามารถใช้สเปคการหมุน 330 องศาในอินเด็กซ์โหมด (index mode) ได้ สเปคของการหมุนหลายรอบ 360 องศามีมีข้อควรระวังดังต่อไปนี้
| โหมดการทำงาน | คำอธิบายการทำงาน | ขอบเขตการทำงาน | รองรับแอบโซลูทอย่างง่าย | ข้อควรระวังในการเลือกคอนโทรลเลอร์ |
|---|---|---|---|---|
| โหมดดัชนี (ค่าเริ่มต้นจากโรงงาน) | หากหมุนแกนหมุนครั้งเดียว พิกัดปัจจุบันจะเป็น 0 องศา ใช้สำหรับการใช้งานที่หมุนไปในทิศทางเดียว | 0 - 359.99 | สามารถ | ไม่รองรับชนิดดังต่อไปนี้ คอนโทรลเลอร์ PCON-CB / CFB *ชนิดการควบคุมพัลส์เทรน *คอนโทรลเลอร์ ML3 PCON-PLB / POB คอนโทรลเลอร์ RCON *คอนโทรลเลอร์ MCON ประเภทของเน็ตเวิร์ค ML3, SSN, ECM |
| โหมดธรรมดา | ใช้สำหรับหมุนภายในขอบเขตจำกัด ต้องหมุนย้อนกลับเพื่อกลับไปที่ 0deg | 0 - 9999.99 (หมายเหตุ 3) | สามารถ |
(หมายเหตุ 3) จำเป็นต้องตั้งค่าพารามิเตอร์ซอฟต์ลิมิตด้วยตนเอง