
คุณสมบัติพิเศษของผลิตภัณฑ์


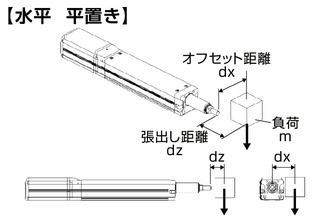
รูปแบบการติดตั้ง



(หมายเหตุ) รูปภาพด้านบนเป็นสเปคแบบมอเตอร์หมุนกลับทางซ้าย (ML)
ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | |||||
|---|---|---|---|---|---|---|
| Lead | Ball screw lead (มม.) | 20 | 12 | 6 | 3 | |
| แนวนอน | น้ำหนักขนย้าย (ข้อควรระวัง 3) | น้ำหนักขนย้ายสูงสุด (กก.) (เปิดโหมดเอาท์พุทสูง) | 6 | 25 | 40 | 60 |
| น้ำหนักขนย้ายสูงสุด (กก.) (ปิดโหมดเอาท์พุทสูง) | 6 | 25 | 40 | 40 | ||
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วสูงสุด (มม./วินาที) | 800 | 700 | 450 | 225 | |
| ความเร็วต่ำสุด (มม./วินาที) | 25 | 15 | 8 | 4 | ||
| พิกัดความเร็วเร่ง-ลด (G) | 0.5 | 0.3 | 0.3 | 0.3 | ||
| ความเร็วเร่ง-ลดสูงสุด (G) | 1 | 1 | 1 | 1 | ||
| แนวตั้ง | น้ำหนักขนย้าย | น้ำหนักขนย้ายสูงสุด (กก.) (เปิดโหมดเอาท์พุทสูง) | 1.5 | 4 | 10 | 20 |
| น้ำหนักขนย้ายสูงสุด (กก.) (ปิดโหมดเอาท์พุทสูง) | 1.5 | 4 | 10 | 20 | ||
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วสูงสุด (มม./วินาที) | 800 | 700 | 450 | 225 | |
| ความเร็วต่ำสุด (มม./วินาที) | 25 | 15 | 8 | 4 | ||
| พิกัดความเร็วเร่ง-ลด (G) | 0.5 | 0.5 | 0.5 | 0.5 | ||
| ความเร็วเร่ง-ลดสูงสุด (G) | 0.5 | 0.5 | 0.5 | 0.5 | ||
| การกด | แรงขับสูงสุด ณ ขณะกด (N) | 56 | 93 | 185 | 370 | |
| ความเร็วสูงสุดในการกด (มม./วินาที) | 20 | 20 | 20 | 20 | ||
| เบรก | ข้อมูลจำเพาะของเบรก | เบรกแม่เหล็กไฟฟ้าชนิด NON-EXCITATION OPERATION | ||||
| แรง Hold ของเบรก (kgf) | 1.5 | 4 | 10 | 20 | ||
| สโตรค | สโตรคต่ำสุด (มม.) | 50 | 50 | 50 | 50 | |
| สโตรคสูงสุด (มม.) | 400 | 400 | 400 | 400 | ||
| ระยะ Pitch ของสโตรค (มม.) | 50 | 50 | 50 | 50 | ||
(ข้อควรระวัง 3) กรณีรับโหลดเรเดียลด้วยไกด์ที่ประกอบจากภายนอก
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | บอลสกรู φ10 มม.แบบรีด (rolled) C10 |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | Lead 20 : ±0.03 มม. Lead 12/6/3 : ±0.02 มม. |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ไม่เกิน 0.1 มม. |
| ก้าน (Rod) | φ22 มม. วัสดุ : สแตนเลส |
| ความแม่นยำในการหมุนของก้าน (Rod) | 0 องศา |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน Max 85%RH (ต้องไม่มีหยดน้ำควบแน่น) |
| ระดับการป้องกัน | IP30 |
| ทนการสั่นสะเทือน - ทนการกระแทก | ไม่เกิน 4.9m/s2 100Hz |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS |
| ชนิดมอเตอร์ | พัลส์มอเตอร์ |
| ชนิดเอนโค้ดเดอร์ | แบบเพิ่มค่า (Incremental) |
| จำนวนพัลส์เอนโค้ดเดอร์ | 800 พัลส์ / รอบ |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" |
ตารางแสดงน้ำหนักขนย้ายโดยแยกตามความเร็ว - ความเร็วเร่ง
เปิดโหมดตั้งค่าเอาท์พุทสูง หน่วยของน้ำหนักขนย้ายคือ กก. ช่องว่าง หมายถึงไม่สามารถทำงานได้
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | ||||||
|---|---|---|---|---|---|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |||||||
| (มม./วินาที) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 6 | 6 | 6 | 5 | 5 | 1.5 | 1.5 | 1.5 |
| 160 | 6 | 6 | 6 | 5 | 5 | 1.5 | 1.5 | 1.5 |
| 320 | 6 | 6 | 6 | 5 | 3 | 1.5 | 1.5 | 1.5 |
| 480 | 6 | 6 | 6 | 5 | 3 | 1.5 | 1.5 | 1.5 |
| 640 | 6 | 4 | 3 | 2 | 1.5 | 1.5 | ||
| 800 | 4 | 3 | 1 | 1 | ||||
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | ||||||
|---|---|---|---|---|---|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |||||||
| (มม./วินาที) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 25 | 25 | 18 | 16 | 12 | 4 | 4 | 4 |
| 100 | 25 | 25 | 18 | 16 | 12 | 4 | 4 | 4 |
| 200 | 25 | 25 | 18 | 16 | 10 | 4 | 4 | 4 |
| 300 | 25 | 25 | 18 | 12 | 8 | 4 | 4 | 4 |
| 400 | 20 | 20 | 14 | 10 | 6 | 4 | 4 | 4 |
| 500 | 15 | 15 | 8 | 6 | 4 | 4 | 3.5 | 3 |
| 600 | 10 | 10 | 6 | 3 | 2 | 4 | 3 | 2 |
| 700 | 6 | 2 | 2 | 1 | ||||
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | ||||||
|---|---|---|---|---|---|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |||||||
| (มม./วินาที) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 40 | 40 | 35 | 30 | 25 | 10 | 10 | 10 |
| 50 | 40 | 40 | 35 | 30 | 25 | 10 | 10 | 10 |
| 100 | 40 | 40 | 35 | 30 | 25 | 10 | 10 | 10 |
| 150 | 40 | 40 | 35 | 25 | 25 | 10 | 10 | 10 |
| 200 | 40 | 40 | 30 | 25 | 20 | 10 | 10 | 10 |
| 250 | 40 | 40 | 27.5 | 22.5 | 18 | 10 | 9 | 8 |
| 300 | 40 | 35 | 25 | 20 | 14 | 6 | 6 | 6 |
| 350 | 40 | 30 | 14 | 12 | 10 | 5 | 5 | 5 |
| 400 | 30 | 18 | 10 | 6 | 5 | 4 | 3 | 3 |
| 450 | 25 | 8 | 3 | 2 | 2 | 1 | ||
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง | ||||||
|---|---|---|---|---|---|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |||||||
| (มม./วินาที) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 25 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 50 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 75 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 100 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 125 | 60 | 60 | 50 | 40 | 30 | 18 | 14 | 10 |
| 150 | 60 | 50 | 40 | 30 | 25 | 14 | 10 | 6 |
| 175 | 60 | 40 | 35 | 25 | 20 | 12 | 6 | 5 |
| 200 | 60 | 35 | 30 | 20 | 14 | 8 | 5 | 4.5 |
| 225 | 40 | 16 | 16 | 10 | 6 | 5 | 5 | 4 |
ปิดโหมดตั้งค่าเอาท์พุทสูง หน่วยของน้ำหนักขนย้ายคือ กก.
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง |
|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |
| (มม./วินาที) | 0.3 | 0.2 |
| 0 | 6 | 1.5 |
| 160 | 6 | 1.5 |
| 320 | 6 | 1.5 |
| 480 | 4 | 1 |
| 640 | 3 | 0.5 |
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง |
|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |
| (มม./วินาที) | 0.2 | 0.2 |
| 0 | 25 | 4 |
| 100 | 25 | 4 |
| 200 | 25 | 4 |
| 300 | 20 | 3 |
| 400 | 10 | 2 |
| 500 | 5 | 1 |
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง |
|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |
| (มม./วินาที) | 0.2 | 0.2 |
| 0 | 40 | 10 |
| 50 | 40 | 10 |
| 100 | 40 | 10 |
| 150 | 40 | 8 |
| 200 | 35 | 5 |
| 250 | 10 | 3 |
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง |
|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |
| (มม./วินาที) | 0.2 | 0.2 |
| 0 | 40 | 20 |
| 25 | 40 | 20 |
| 50 | 40 | 16 |
| 75 | 40 | 12 |
| 100 | 40 | 9 |
| 125 | 40 | 5 |
สโตรคและความเร็วสูงสุด
(หน่วยเป็น มม./วินาที)
| ระยะ Lead (มม.) | สโตรค คอนโทรลเลอร์ | 50 - 400 (ทุกๆ 50 มม.) |
|---|---|---|
| 20 | ใช้กับกำลัง (Output) สูง | 800 |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 640 | |
| 12 | ใช้กับกำลัง (Output) สูง | 700 |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 500 | |
| 6 | ใช้กับกำลัง (Output) สูง | 450 |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 250 | |
| 3 | ใช้กับกำลัง (Output) สูง | 225 |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 125 |
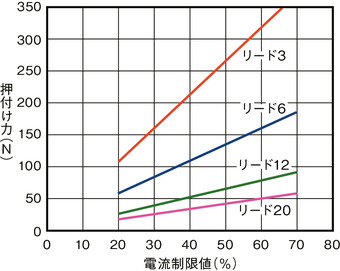
ภาพแสดงความสัมพันธ์ระหว่างแรงผลักกับค่าจำกัดกระแสไฟฟ้า
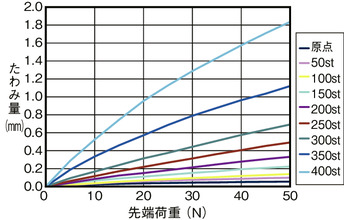
ปริมาณการแอ่นตัวของก้าน (Rod) (ค่าอ้างอิง)
ภาพด้านล่างนี้คือปริมาณการแอ่นตัวกรณีติดตั้งใช้งานแอคชูเอเตอร์ในแนวตั้งแล้วก้าน (Rod) รับน้ำหนักจากฝั่งเดียว
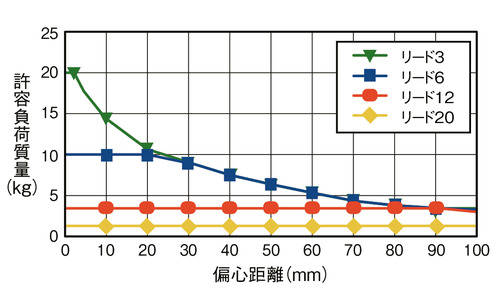
น้ำหนักโหลดที่ยอมรับได้ที่ปลายก้าน (Rod)
แนวนอน

เงื่อนไขการคำนวณน้ำหนักโหลดที่ยอมรับได้
พิจารณาโมเม้นต์จากการเร่งลดความเร็ว
ได้น้ำหนักโหลดสำหรับอายุการใช้งานไกด์ที่ 5,000 กม.
(ความเร็วเร่ง 1G, ความเร็ว 500 มม. / วินาที)

แนวตั้ง
เงื่อนไขการคำนวณน้ำหนักโหลดที่ยอมรับได้
พิจารณาโมเม้นต์จากการเร่งลดความเร็ว
ได้น้ำหนักโหลดสำหรับอายุการใช้งานไกด์ที่ 5,000 กม.
(ความเร็วเร่ง 0.5G, ความเร็ว 500 มม. / วินาที)

คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกนที่ เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MCON-C/CG |  | 8 | DC24V | - | - | - | ● | ● | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | 256 |
| MCON-LC/LCG |  | 6 | - | - | ● | ● | ● | - | ● | ● | - | - | ● | ● | ● | - | - | 256 | |
| MSEL-PC/PG |  | 4 | เฟสเดี่ยว AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● *เลือก | ● *เลือก | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (สเปคเน็ตเวิร์คคือ 768) |
| PCON-CYB/PLB/POB |  | 1 | ● *เลือก | ● *เลือก | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 | - | - | - | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 128 | |
(หมายเหตุ) สำหรับเน็ตเวิร์คที่กำกับไว้ด้วยสัญลักษณ์ตัวย่อ เช่น DV, CC โปรดตรวจสอบที่หน้า 6-13
(หมายเหตุ) MCON เป็นอุปกรณ์เสริม ใช้ได้เฉพาะ "สเปคตั้งค่าเอาท์พุทสูง" สามารถตั้งค่าเปิดใช้งานโหมดเอาท์พุทสูงได้ เมื่อเปิดโหมดเอาท์พุทสูง จำนวนแกนสูงสุดที่สามารถเชื่อมต่อได้คือ C : 4, LC : 3
มาตรฐานต่างประเทศ


คุณสมบัติ

ข้อควรระวังในการเลือก
| (1) น้ำหนักขนย้ายในตาราง "ข้อมูลจำเพาะที่สำคัญ" จะระบุด้วยค่าสูงสุด รายละเอียดโปรดดูที่ "ตารางแสดงน้ำหนักขนย้ายโดยแยกตามความเร็ว - ความเร็วเร่ง" (2) น้ำหนักขนย้ายในแนวนอนทั้งหมดคือค่าตัวเลขกรณีมีการใช้งานไกด์ภายนอกร่วม (3) กรณีใช้งานแบบกด โปรดดูที่ "ภาพแสดงความสัมพันธ์ระหว่างแรงกดกับค่าจำกัดกระแสไฟฟ้า" แรงผลักที่แสดงเป็นค่ามาตรฐาน โปรดดูข้อควรระวังที่หน้า 1-427 (4) ต้องใช้ความระมัดระวังในการติดตั้งแตกต่างกันออกไปตามการติดตั้งแบบแนวตั้ง, แบบแขวน รายละเอียดโปรดดูที่หน้า 1-379 (5) กระบอกเรเดียลติดตั้งอยู่ภายในไกด์ สำหรับน้ำหนักโหลดที่สามารถยอมรับได้ โปรดดูที่ "น้ำหนักโหลดที่ยอมรับได้ที่ปลายก้าน (Rod)" (6) กรณีใช้งานด้วย Absolute อย่างง่าย ช่องชนิดของเอนโค้ดเดอร์ในรายการรุ่นโมเดลก็ยังเป็น "I" (7) ตอนเชื่อมต่อ RCON จะต้องใช้ชุดแปลง (Convert unit) หรือสายเคเบิลแปลง (Convert Cable) โปรดศึกษารายละเอียดเพิ่มเติมได้จากโฮมเพจ |
ภาพร่างแสดงขนาด

ST : สโตรค
M.E. : Mechanical end
S.E. : Stroke end
(หมายเหตุ) ต่อมอเตอร์และเสียบสายเคเบิลของเอนโค้ดเดอร์เข้ากับคอนเน็คเตอร์ต่อสายเคเบิล
(ข้อควรระวัง) ขณะกลับตำแหน่งเริ่มต้น ก้าน (Rod) จะเคลื่อนที่ไปถึง M.E. โปรดระวังการชนกับวัตถุโดยรอบ
(ข้อควรระวัง) ทิศทางผิวหน้าของ Width across flats จะแตกต่างกันไปตามผลิตภัณฑ์
(ข้อควรระวัง) กรณีติดตั้งตัวเครื่องโดยใช้ Front housing และหน้าแปลน จะต้องระวังไม่ให้มีแรงภายนอกมากระทำกับส่วนตัวเครื่อง
(ข้อควรระวัง) แบบมีเบรค สโตรค 50 ใช้งานไม่ได้เนื่องจากฝาครอบมอเตอร์จะชนกับหน้าแปลน
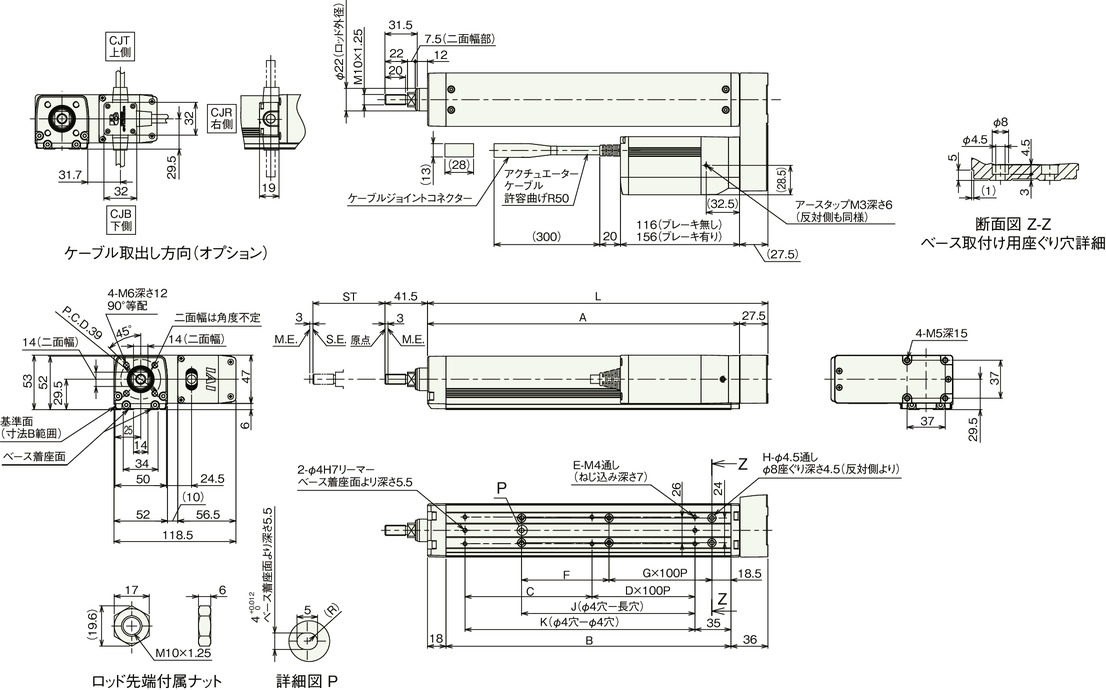
ขนาดแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | |
|---|---|---|---|---|---|---|---|---|---|
| L | 181 | 231 | 281 | 331 | 381 | 431 | 481 | 531 | |
| A | 153.5 | 203.5 | 253.5 | 303.5 | 353.5 | 403.5 | 453.5 | 503.5 | |
| B | 127 | 177 | 227 | 277 | 327 | 377 | 427 | 477 | |
| C | 73.5 | 123.5 | 73.5 | 123.5 | 73.5 | 123.5 | 73.5 | 123.5 | |
| D | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 3 | |
| E | 4 | 4 | 6 | 6 | 8 | 8 | 10 | 10 | |
| F | 35 | 85 | 135 | 85 | 135 | 85 | 135 | 85 | |
| G | 0 | 0 | 0 | 1 | 1 | 2 | 2 | 3 | |
| H | 4 | 4 | 4 | 6 | 6 | 8 | 8 | 10 | |
| J | 18.5 | 68.5 | 118.5 | 168.5 | 218.5 | 268.5 | 318.5 | 368.5 | |
| K | 73.5 | 123.5 | 173.5 | 223.5 | 273.5 | 323.5 | 373.5 | 423.5 | |
| โหลดคงที่ที่ยอมรับได้ที่ปลายก้าน (Rod) (N) | 66 | 51 | 42 | 35 | 30 | 26 | 22 | 20 | |
| น้ำหนักโหลดแบบไดนามิคที่ยอมรับได้ที่ปลายก้าน (Rod) (อายุใช้งาน 5000 กม.) (N) | ระยะเยื้อง 0 มม. | 32.4 | 23.6 | 18.1 | 14.4 | 11.6 | 9.5 | 7.7 | 6.2 |
| ระยะเยื้อง 100 มม. | 25.6 | 19.7 | 15.7 | 12.7 | 10.4 | 8.6 | 7.1 | 5.7 | |
| แรงบิดคงที่ที่ยอมรับได้ที่ปลายก้าน (Rod) (N・m) | 6.6 | 5.2 | 4.3 | 3.7 | 3.2 | 2.8 | 2.6 | 2.3 | |
| แรงบิดไดนามิคที่ยอมรับได้ที่ปลายก้าน (Rod) (N・m) | 2.6 | 2.0 | 1.6 | 1.3 | 1.0 | 0.9 | 0.7 | 0.6 | |
น้ำหนักแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | |
|---|---|---|---|---|---|---|---|---|---|
| น้ำหนัก (กก.) | ไม่มีเบรก | 2.1 | 2.4 | 2.6 | 2.9 | 3.2 | 3.4 | 3.7 | 4.0 |
| มีเบรก | 2.3 | 2.6 | 2.9 | 3.1 | 3.4 | 3.7 | 3.9 | 4.2 | |