
คุณสมบัติพิเศษของผลิตภัณฑ์


รูปแบบการติดตั้ง


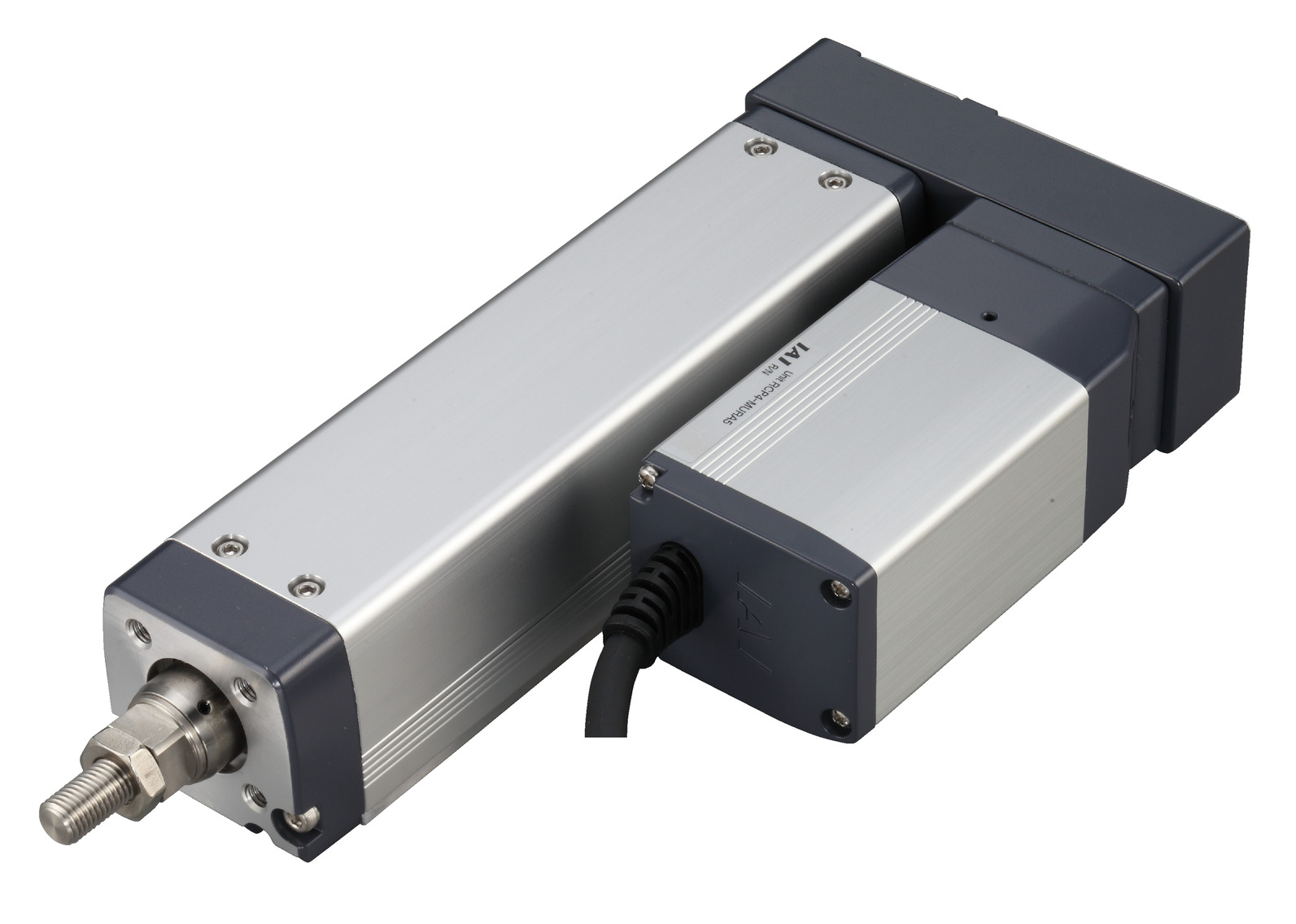
(หมายเหตุ) รูปภาพด้านบนเป็นสเปคแบบมอเตอร์หมุนกลับทางซ้าย (ML)
สเปคของแอคชูเอเตอร์
| รูปแบบ | ระยะ Lead (มม.) | คอนโทรลเลอร์ เชื่อมต่อ | น้ำหนักขนย้ายสูงสุด | แรงกดย้ำสูงสุด (นิวตัน) | สโตรค (มม.) | |
|---|---|---|---|---|---|---|
| แนวนอน (กก.) | แนวตั้ง (กก.) | |||||
| RCP4-RA6R-I-56P-24-①-P3-②-③ | 24 | ใช้กับกำลัง (Output) สูง | 20 | 3 | 182 | 50 - 500 (ทุกๆ 50 มม.) |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 18 | 3 (ข้อควรระวัง 1) | ||||
| RCP4-RA6R-I-56P-16-①-P3-②-③ | 16 | ใช้กับกำลัง (Output) สูง | 50 | 8 | 273 | |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 40 (หมายเหตุ 1) | 5 (หมายเหตุ 1) | ||||
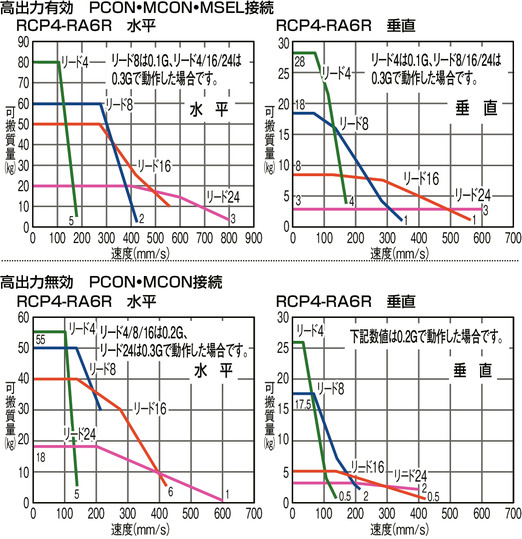
| RCP4-RA6R-I-56P-8-①-P3-②-③ | 8 | ใช้กับกำลัง (Output) สูง | 60 | 18 | 547 | |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 50 (หมายเหตุ 1) | 17.5 (หมายเหตุ 1) | ||||
| RCP4-RA6R-I-56P-4-①-P3-②-③ | 4 | ใช้กับกำลัง (Output) สูง | 80 | 28 | 1094 | |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 55 (หมายเหตุ 1) | 26 (หมายเหตุ 1) | ||||
อธิบายสัญลักษณ์ 1 สโตรค 2 ความยาวสายเคเบิล 3 อุปกรณ์เสริม
(หมายเหตุ 1) เป็นค่าในกรณี 0.2G
| ระยะ Lead (มม.) | สโตรค คอนโทรลเลอร์ | 50 - 500 (ทุกๆ 50 มม.) |
|---|---|---|
| 24 | ใช้กับกำลัง (Output) สูง | 800<600> |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 600<400> | |
| 16 | ใช้กับกำลัง (Output) สูง | 560 |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 420 | |
| 8 | ใช้กับกำลัง (Output) สูง | 420<350> |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 210 | |
| 4 | ใช้กับกำลัง (Output) สูง | 175 |
| ใช้กับกำลัง (Output) สูงไม่ได้ | 140 |
(หน่วยเป็น มม./วินาที)
(หมายเหตุ) ที่ระบุใน < > คือกรณีที่ใช้งานโดยติดตั้งในแนวตั้งฉาก
(ข้อควรระวัง) Lead 8 คือกรณีความเร็วเร่ง 0.1G
ภาพแสดงความสัมพันธ์ระหว่างความเร็วกับน้ำหนักขนย้าย
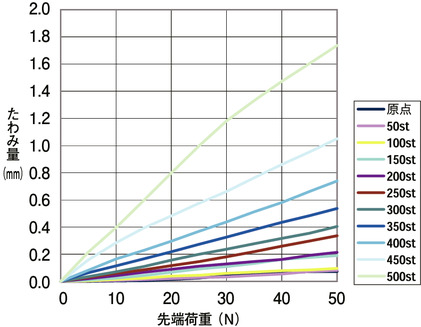
ปริมาณการแอ่นตัวของก้าน (Rod) (ค่าอ้างอิง)
ภาพด้านล่างนี้คือปริมาณการแอ่นตัวกรณีติดตั้งใช้งานแอคชูเอเตอร์ในแนวตั้งแล้วก้าน (Rod) รับน้ำหนักจากฝั่งเดียว
สเปคแบบเพิ่มค่า
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | บอลสกรู φ12 มม. แบบรีด (Rolled) C10 |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ (หมายเหตุ 4) | ±0.02 มม. [±0.03 มม.] |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ไม่เกิน 0.1 มม. |
| ก้าน (Rod) | φ25 มม. ท่อสแตนเลส |
| ความแม่นยำในการหมุนของก้าน (Rod) | 0 องศา |
| โหลดส่วนปลายก้าน (Rod) ที่ยอมรับได้ / แรงบิดที่ยอมรับได้ | โปรดดูตารางขนาดมิติแยกตามสโตรค / โปรดดู แคตตาล็อครวมผลิตภัณฑ์ปี 2560 หน้า 1-475 |
| ระยะยื่นส่วนปลายก้าน (Rod) | ไม่เกิน 100 มม. |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำควบแน่น) |
(ข้อควรระวัง 4 ) ที่ระบุใน [ ] คือกรณี Lead 24
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกนที่ เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MCON-C/CG |  | 8 | DC24V | - | - | - | ● | ● | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | 256 |
| MCON-LC/LCG |  | 6 | - | - | ● | ● | ● | - | ● | ● | - | - | ● | ● | ● | - | - | 256 | |
| MSEL-PC/PG |  | 4 | เฟสเดี่ยว AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● *เลือก | ● *เลือก | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (สเปคเน็ตเวิร์คคือ 768) |
| PCON-CYB/PLB/POB |  | 1 | ● *เลือก | ● *เลือก | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 | - | - | - | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 128 | |
(หมายเหตุ) สำหรับเน็ตเวิร์คที่กำกับไว้ด้วยสัญลักษณ์ตัวย่อ เช่น DV, CC โปรดตรวจสอบที่หน้า 6-13
(หมายเหตุ) MCON เป็นอุปกรณ์เสริม ใช้ได้เฉพาะ "สเปคตั้งค่าเอาท์พุทสูง" สามารถตั้งค่าเปิดใช้งานโหมดเอาท์พุทสูงได้ เมื่อเปิดโหมดเอาท์พุทสูง จำนวนแกนสูงสุดที่สามารถเชื่อมต่อได้คือ C : 4, LC : 3
มาตรฐานต่างประเทศ


คุณสมบัติ

ข้อควรระวังในการเลือก
| (1) น้ำหนักขนย้ายสูงสุดคือค่าตัวเลขกรณีที่ทำงานด้วยความเร็วเร่ง 0.3G (บางรุ่นจะ 0.2G) รายละเอียดโปรดดูที่แคตตาล็อครวมผลิตภัณฑ์ปี 2560 หน้า 1-455 (2) น้ำหนักขนย้ายสูงสุด, ความเร็วสูงสุดจะแปรผันไปตามคอนโทรลเลอร์ที่เชื่อมต่อกับ RCP4 โปรดใช้ความระวัง รายละเอียด โปรดศึกษาจาก "สเปคแอคชูเอเตอร์" (3) น้ำหนักขนย้ายในแนวนอนทั้งหมดคือค่าตัวเลขกรณีใช้งานไกด์ภายนอกร่วม (4) สำหรับการใช้งานกด โปรดดูที่แคตตาล็อครวมผลิตภัณฑ์ปี 2560 หน้า 1-387 (5) กระบอกเรเดียลติดตั้งอยู่ภายในไกด์ สำหรับน้ำหนักโหลดที่ยอมรับได้ โปรดดูจากกราฟในแคตตาล็อครวมผลิตภัณฑ์ปี 2560 หน้า 1-475 (6) กรณีใช้งานด้วย Absolute อย่างง่าย ช่องชนิดของเอนโค้ดเดอร์ในรายการรุ่นโมเดลก็ยังเป็น "I" (7) จะต้องใช้ความระมัดระวังแยกตามลักษณะการติดตั้ง รายละเอียดโปรดดูที่หน้า 1-379 (8) เมื่อเชื่อมต่อ RCON จะต้องใช้ชุดแปลงหรือสายเคเบิลแปลง โปรดศึกษารายละเอียดเพิ่มเติมได้จากโฮมเพจ |
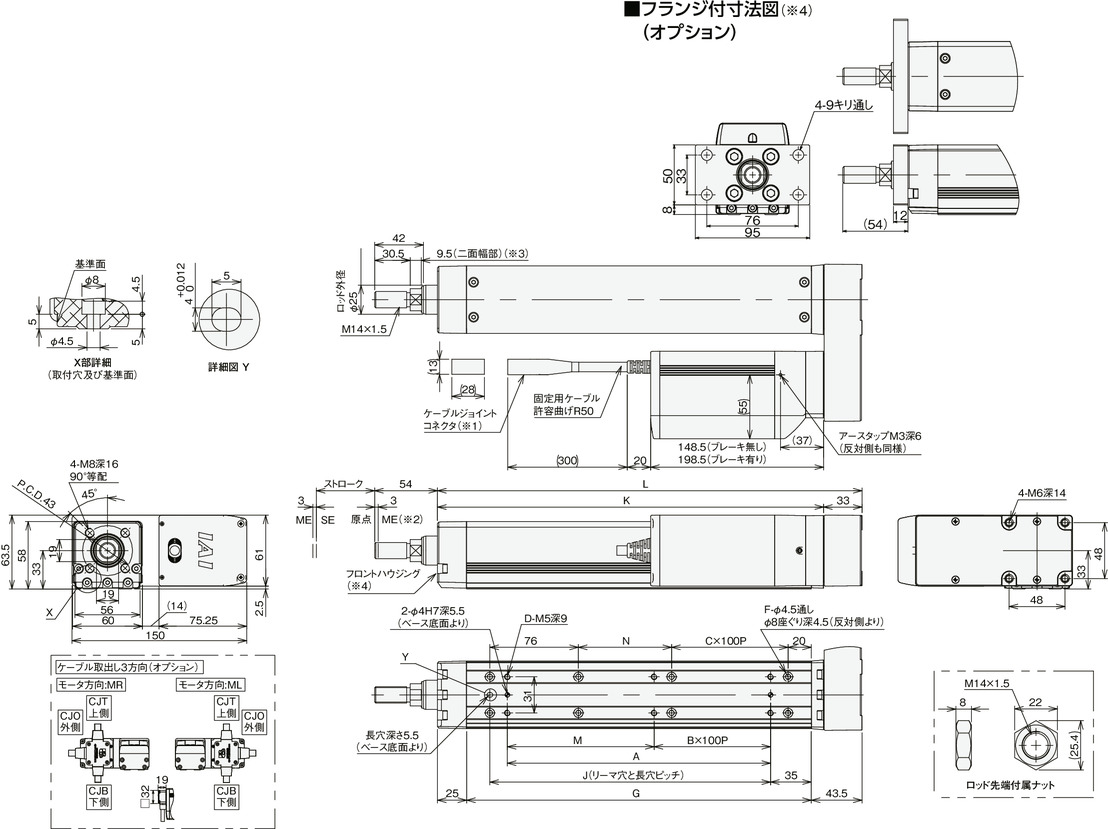
ภาพร่างแสดงขนาด

ME : เมคคานิคัลเอน
SE : สโตรคเอน
*1 เชื่อมต่อมอเตอร์และเอนโค้ดเดอร์
*2 กรณีเคลื่อนที่กลับตำแหน่งเริ่มต้น ก้าน (Rod) จะเคลื่อนที่ไปถึง ME โปรดระวังการชนกับวัตถุโดยรอบ
* 3 ทิศทางของ Width across flats แตกต่างกันไปตามแต่ผลิตภัณฑ์
*4 กรณีติดตั้งตัวเครื่องโดยใช้ Front housing และหน้าแปลน จะต้องระวังไม่ให้มีแรงจากภายนอกมากระทำกับส่วนตัวเครื่อง
(ข้อควรระวัง) แบบมีเบรค สโตรค 50 ใช้งานไม่ได้เนื่องจากฝาครอบมอเตอร์จะชนกับหน้าแปลน
ขนาดมิติและมวลแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| L | 214.5 | 264.5 | 314.5 | 364.5 | 414.5 | 464.5 | 514.5 | 564.5 | 614.5 | 664.5 | |
| A | 76 | 126 | 176 | 226 | 276 | 326 | 376 | 426 | 476 | 526 | |
| B | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | |
| C | 0 | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 3 | 4 | |
| D | 4 | 4 | 6 | 6 | 8 | 8 | 10 | 10 | 12 | 12 | |
| F | 6 | 6 | 6 | 8 | 8 | 10 | 10 | 12 | 12 | 14 | |
| G | 146 | 196 | 246 | 296 | 346 | 396 | 446 | 496 | 546 | 596 | |
| J | 91 | 141 | 191 | 241 | 291 | 341 | 391 | 441 | 491 | 541 | |
| K | 181.5 | 231.5 | 281.5 | 331.5 | 381.5 | 431.5 | 481.5 | 531.5 | 581.5 | 631.5 | |
| M | 76 | 126 | 76 | 126 | 76 | 126 | 76 | 126 | 76 | 126 | |
| N | 30 | 80 | 130 | 80 | 130 | 80 | 130 | 80 | 130 | 80 | |
| โหลดคงที่ที่ยอมรับได้ที่ปลายก้าน (Rod) (N) | 112.7 | 91.5 | 76.7 | 65.7 | 57.2 | 50.4 | 44.8 | 40.2 | 36.2 | 32.7 | |
| น้ำหนักโหลดแบบไดนามิค ที่ยอมรับได้ที่ปลายก้าน (Rod) (N) | ระยะเยื้องโหลด 0 มม. | 49.0 | 37.4 | 29.9 | 24.5 | 20.4 | 17.1 | 14.5 | 12.3 | 10.3 | 8.6 |
| ระยะเยื้องโหลด 100 มม. | 38.7 | 31.0 | 25.5 | 21.4 | 18.1 | 15.4 | 13.2 | 11.2 | 9.5 | 8.0 | |
| แรงบิดคงที่ที่ยอมรับได้ที่ปลายก้าน (Rod) (N・m) | 11.4 | 9.3 | 7.9 | 6.8 | 6.0 | 5.4 | 4.9 | 4.5 | 4.1 | 3.8 | |
| แรงบิดไดนามิคที่ยอมรับได้ที่ปลายก้าน (Rod) (N・m) | 3.9 | 3.1 | 2.5 | 2.1 | 1.8 | 1.5 | 1.3 | 1.1 | 1.0 | 0.8 | |
| น้ำหนัก (กก.) | ไม่มีเบรก | 3.9 | 4.2 | 4.5 | 4.8 | 5.1 | 5.5 | 5.8 | 6.1 | 6.4 | 6.8 |
| มีเบรก | 4.4 | 4.7 | 5.0 | 5.3 | 5.6 | 6.0 | 6.3 | 6.6 | 6.9 | 7.3 | |