
คุณสมบัติพิเศษของผลิตภัณฑ์




รูปแบบการติดตั้ง


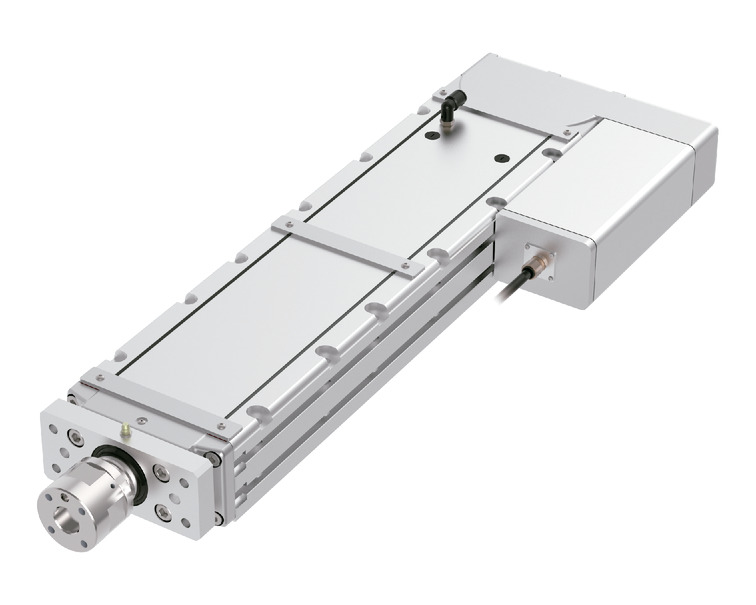
(หมายเหตุ) รูปภาพด้านบนเป็นสเปคแบบมอเตอร์หมุนกลับทางซ้าย (ML)
ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | ||||
|---|---|---|---|---|---|
| Lead | Ball screw lead (มม.) | 20 | 10 | 5 | |
| แนวนอน | น้ำหนักขนย้าย (ข้อควรระวัง 2) | น้ำหนักโหลดสูงสุด (กก.) | 30 | 60 | 100 |
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วสูงสุด (มม./วินาที) | 360 | 220 | 110 | |
| ความเร็วต่ำสุด (มม./วินาที) | 25 | 13 | 7 | ||
| พิกัดความเร็วเร่ง-ลด (G) | 0.2 | 0.2 | 0.1 | ||
| ความเร็วเร่ง-ลดสูงสุด (G) | 0.2 | 0.2 | 0.1 | ||
| แนวตั้ง | น้ำหนักขนย้าย | น้ำหนักโหลดสูงสุด (กก.) | - | 30.5 | 59 |
| ความเร็ว / ความเร็วเร่ง-ลด | ความเร็วสูงสุด (มม./วินาที) | - | 160 | 90 | |
| ความเร็วต่ำสุด (มม./วินาที) | - | 13 | 7 | ||
| พิกัดความเร็วเร่ง-ลด (G) | - | 0.2 | 0.1 | ||
| ความเร็วเร่ง-ลดสูงสุด (G) | - | 0.2 | 0.1 | ||
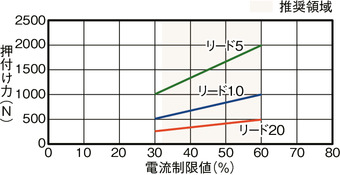
| การกด | แรงขับสูงสุด ณ ขณะกด (N) | 500 | 1000 | 2000 | |
| ความเร็วสูงสุดในการกด (มม./วินาที) | 10 | 10 | 10 | ||
| เบรก | ข้อมูลจำเพาะของเบรก | - | เบรกแม่เหล็กไฟฟ้าชนิด NON-EXCITATION OPERATION | ||
| แรง Hold ของเบรก (kgf) | - | 30.5 | 59 | ||
| สโตรค | สโตรคต่ำสุด (มม.) | 50 | 50 | 50 | |
| สโตรคสูงสุด (มม.) | 800 | 800 | 800 | ||
| ระยะ Pitch ของสโตรค (มม.) | 50 | 50 | 50 | ||
(ข้อควรระวัง 2) คือกรณีที่รับโหลดเรเดียลด้วยไกด์ติดตั้งจากภายนอก
| รายการ | เนื้อหา | ||||
|---|---|---|---|---|---|
| รูปแบบการขับเคลื่อน | บอลสกรู φ16 มม. แบบรีด (rolled) C10 | ||||
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.01 มม. | ||||
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ไม่เกิน 0.1 มม. | ||||
| ไกด์นำร่องก้าน (Rod guide) | ชนิดหมุนเวียนเคลื่อนที่เชิงเส้นแบบไม่จำกัด | ||||
| คุณสมบัติของวัสดุหลัก | ก้าน (Rod) | สแตนเลส φ45 มม. ชุบฮาร์ดโครม | |||
| เฟรม | อะลูมิเนียม,ชุบผิวสีขาว | ||||
| ซีลกันฝุ่น | ยาง (NBR) | ||||
| สายแอคชูเอเตอร์ | ไวนิลคลอไรด์ (PVC) | ||||
| ความแม่นยำการหยุดหมุนของก้าน (Rod) (ข้อควรระวัง 3) | 0 องศา | ||||
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำ) | ||||
| ระดับการป้องกัน | IP65(IEC60529/JIS0920) | ||||
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 | ||||
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS | ||||
| ชนิดมอเตอร์ | พัลส์มอเตอร์ | ||||
| ชนิดเอนโค้ดเดอร์ | ไร้แบตเตอรี่แบบสัมบูรณ์ | ||||
| จำนวนพัลส์เอนโค้ดเดอร์ | 8192 พัลส์/รอบ | ||||
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" | ||||
(หมายเหตุ 3) คือ มุมการกระจัดในทิศทางการหมุนของก้าน (Rod) ตอน Unload
สโตรคและความเร็วสูงสุด
กรณีอุณหภูมิแวดล้อมเกิน 5 °C
(หน่วยเป็น มม./วินาที)
| ระยะ Lead (มม.) | 50 | 100 - 450 (ทุกๆ 50 มม.) | 500 | 550 | 600 | 650 | 700 | 750 | 800 |
|---|---|---|---|---|---|---|---|---|---|
| 20 | 280 | 360 | 340 | 295 | 260 | 225 | 200 | 180 | |
| 10 | 220<160> | 195<160> | 165<160> | 145 | 125 | 110 | 100 | 90 | |
| 5 | 110<90> | 95<90> | 80 | 70 | 60 | 55 | 50 | 45 | |
(หมายเหตุ) ที่ระบุใน < > คือกรณีที่ใช้งานโดยติดตั้งในแนวตั้งฉาก
กรณีอุณหภูมิแวดล้อมน้อยกว่า 5 °C
(หน่วยเป็น มม./วินาที)
| ระยะ Lead (มม.) | 50 | 100 - 450 (ทุกๆ 50 มม.) | 500 | 550 | 600 | 650 | 700 | 750 | 800 |
|---|---|---|---|---|---|---|---|---|---|
| 20 | 240 | 225 | 200 | 180 | |||||
| 10 | 120 | 110 | 100 | 90 | |||||
| 5 | 80 | 70 | 60 | 55 | 50 | 45 | |||
ภาพแสดงความสัมพันธ์ระหว่างแรงผลักกับค่าจำกัดกระแสไฟฟ้า
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกน ที่เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MSEL-PCF/PGF |  | 4 | เฟสเดี่ยว AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CFB/CGFB |  | 1 | DC24V | ● *เลือก | ● *เลือก | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (สเปคเน็ตเวิร์คคือ 768) |
| RCON |  | 16 (ML3, SSN, ECM คือ 8) | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3, SSN, ECM ไม่มีข้อมูลตำแหน่ง) | |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(หมายเหตุ) ดูหน้า 8-17 สำหรับตัวย่อเครือข่าย เช่น DV และ CC
(หมายเหตุ) สำหรับคอนโทรลเลอร์ในตัวของ RCP6S ซีรีส์ โปรดดูหน้า 8-139
(หมายเหตุ) แกนที่ 3, 4 ของ MSEL-PCF/PGF ไม่สามารถเชื่อมต่อได้
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
| (1) น้ำหนักขนย้าย (เพย์โหลด) ใน "ข้อมูลจำเพาะหลัก" แสดงให้เห็นค่าสูงสุด รายละเอียดโปรดดูที่ "ตารางแสดงน้ำหนักขนย้ายโดยแยกตามความเร็ว - ความเร็วเร่ง" (2) กระบอกเรเดียลติดตั้งไกด์ไว้ภายใน โปรดดู "น้ำหนักโหลดที่ยอมรับได้ที่ปลายก้าน " สำหรับน้ำหนักโหลดที่ยอมรับได้ สำหรับรายละเอียด โปรดดูที่หน้า 1-299 (3) เมื่อทำการกด โปรดดู "แผนภูมิความสัมพันธ์ของแรงกดและค่าขีดจำกัดกำลังของกระแสไฟฟ้า" แรงผลักที่แสดงเป็นค่ามาตรฐาน โปรดตรวจสอบข้อควรระวังได้ที่หน้า 1-269 (4) ดิวตี้ของ RCP6SW (พร้อมตัวควบคุมในตัว) ไม่ควรเกิน 70% (5) กรณีใช้งาน Lead 5 ในแนวตั้ง อายุใช้งานจะแปรผันตามน้ำหนักขนย้าย รายละเอียดโปรดดูที่ "น้ำหนักขนย้ายในแนวตั้งและอายุใช้งานเคลื่อนที่" (6) ขั้วต่อข้อต่อสายเคเบิลไม่กันหยดน้ำโปรดติดตั้งในที่ที่ไม่โดนน้ำ (7) RCP6SW ที่มีตัวควบคุมในตัวไม่มีช่องสำหรับเชื่อมต่อทีชชิ่งทูล (teaching tool) เชื่อมต่อทีชชิ่งทูล (teaching tool) เข้ากับยูนิตเกตเวย์และตั้งค่าข้อมูลพารามิเตอร์ ฯลฯ ผ่านยูนิตเกตเวย์ (8) การติดตั้งในลักษณะต่างๆ จำเป็นต้องใช้ความระมัดระวัง สำหรับรายละเอียด โปรดดูที่หน้า 1-261 |
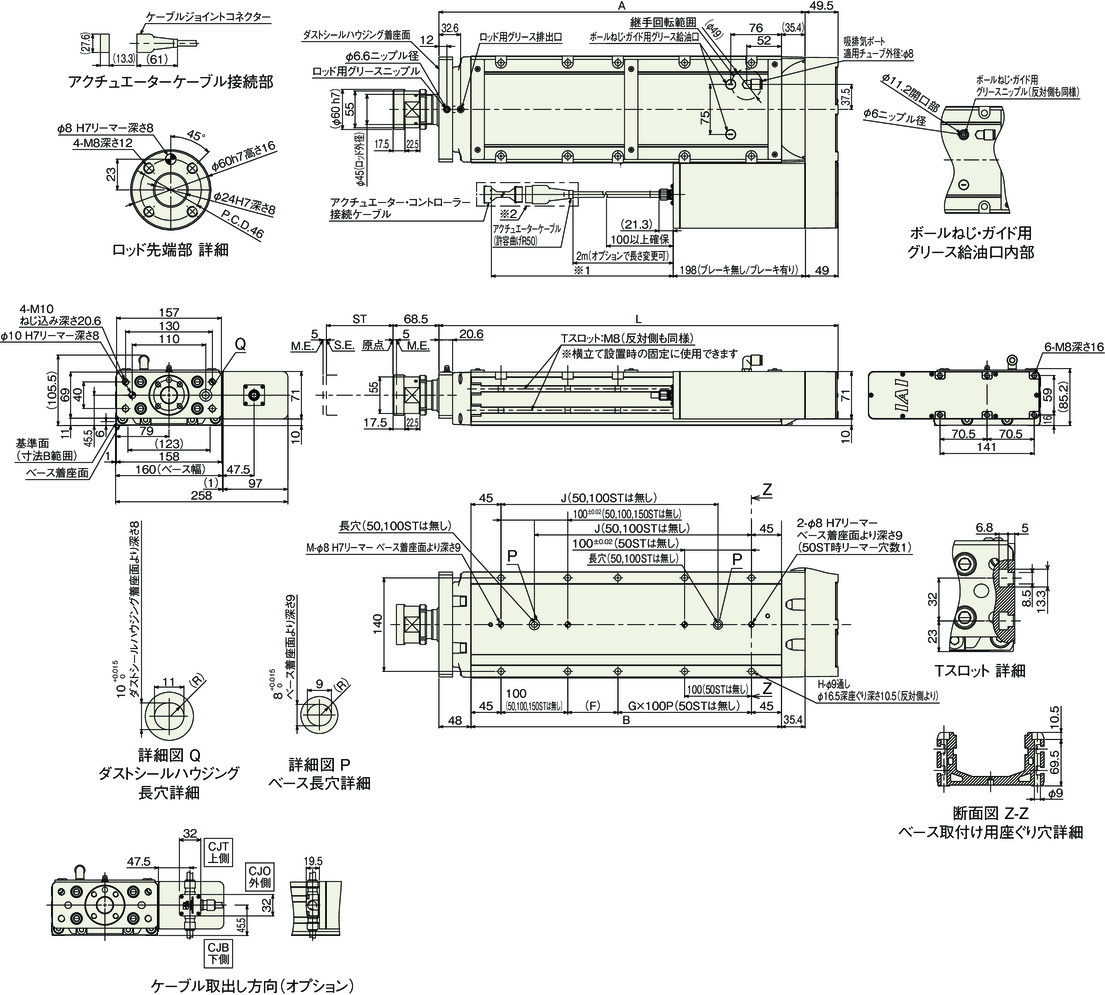
ภาพร่างแสดงขนาด

RCP6W-WRA16R
ST : สโตรค
M.E. : Mechanical end
S.E. : Stroke end
*1 ตรวจสอบให้แน่ใจว่าความยาวรวมของสายสายเคเบิลแอคทูเอเตอร์และสายเชื่อมต่อแอคทูเอเตอร์ /คอนโทรลเลอร์ ไม่เกิน 20 ม.
*2 ส่วนรีเลย์สายเคเบิล (ขั้วต่อข้อต่อสายเคเบิล) ภายใน ไม่กันหยดน้ำ
(ข้อควรระวัง) กรณีกลับตำแหน่งเริ่มต้น ก้าน (Rod) จะเคลื่อนที่ไปถึง M.E. โปรดระวังการชนกับวัตถุโดยรอบ
(หมายเหตุ) ในกรณีที่วัตถุที่ขนย้ายมีส่วนยื่นที่มีขนาดใหญ่ หรือจำเป็นต้องปรับมุมให้แม่นยำมาก โปรดติดตั้งวัตถุที่ขนย้ายโดยไม่ต้องใช้รูคว้าน (Reamer hole)
(หมายเหตุ) โปรดดูหน้า 1-344 สำหรับวัสดุของแต่ละส่วน
(หมายเหตุ) รูปภาพด้านล่างเป็นกรณีใช้สเปคมอเตอร์หมุนกลับทางซ้าย (ML)
ขนาดแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | 347.9 | 397.9 | 447.9 | 497.9 | 547.9 | 597.9 | 647.9 | 697.9 | 747.9 | 797.9 | 847.9 | 897.9 | 947.9 | 997.9 | 1047.9 | 1097.9 | ||
| A | 298.4 | 348.4 | 398.4 | 448.4 | 498.4 | 548.4 | 598.4 | 648.4 | 698.4 | 748.4 | 798.4 | 848.4 | 898.4 | 948.4 | 998.4 | 1048.4 | ||
| B | 215 | 265 | 315 | 365 | 415 | 465 | 515 | 565 | 615 | 665 | 715 | 765 | 815 | 865 | 915 | 965 | ||
| F | 125 | 75 | 125 | 75 | 125 | 75 | 125 | 75 | 125 | 75 | 125 | 75 | 125 | 75 | 125 | 75 | ||
| G | 0 | 1 | 1 | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | 7 | ||
| H | 4 | 6 | 6 | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 | ||
| J | - | - | 175 | 225 | 275 | 325 | 375 | 425 | 475 | 525 | 575 | 625 | 675 | 725 | 775 | 825 | ||
| M | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | ||
| โหลดคงที่ที่ยอมรับได้ที่ปลายก้าน (Rod) (N) | 588 | 588 | 588 | 511 | 451 | 402 | 362 | 329 | 300 | 275 | 254 | 235 | 217 | 202 | 188 | 176 | ||
| แรงบิดคงที่ที่ยอมรับได้ที่ปลายก้าน (Rod) (N・m) | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | 40 | ||
| 3000 กม. | น้ำหนักโหลดแบบไดนามิคที่ยอมรับได้ที่ปลายก้าน (Rod) (N) | ระยะเยื้อง 0 มม. | 255 | 220 | 191 | 168 | 149 | 134 | 120 | 109 | 99 | 90 | 81 | 74 | 67 | 61 | 55 | 50 |
| ระยะเยื้อง 150 มม. | 133 | 133 | 133 | 133 | 133 | 122 | 111 | 101 | 92 | 84 | 77 | 70 | 64 | 58 | 53 | 48 | ||
| แรงบิดไดนามิคที่ยอมรับได้ที่ปลายก้าน (Rod) (N・m) | 20.0 | 20.0 | 20.0 | 20.0 | 20.0 | 18.3 | 16.7 | 15.2 | 13.8 | 12.6 | 11.5 | 10.5 | 9.6 | 8.7 | 7.9 | 7.1 | ||
| 5000 กม. | น้ำหนักโหลดแบบไดนามิคที่ยอมรับได้ที่ปลายก้าน (Rod) (N) | ระยะเยื้อง 0 มม. | 214 | 184 | 160 | 140 | 124 | 111 | 99 | 89 | 80 | 72 | 65 | 59 | 53 | 47 | 42 | 37 |
| ระยะเยื้อง 150 มม. | 133 | 133 | 133 | 124 | 112 | 101 | 91 | 83 | 75 | 68 | 62 | 56 | 50 | 45 | 40 | 36 | ||
| แรงบิดไดนามิคที่ยอมรับได้ที่ปลายก้าน (Rod) (N・m) | 20.0 | 20.0 | 20.0 | 18.6 | 16.8 | 15.2 | 13.7 | 12.4 | 11.3 | 10.2 | 9.2 | 8.4 | 7.5 | 6.8 | 6.0 | 5.3 | ||
น้ำหนักแยกตามสโตรค
| สโตรค | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| น้ำหนัก (กก.) | RCP6W | ไม่มีเบรก | 13.5 | 14.7 | 15.9 | 17.0 | 18.1 | 19.3 | 20.4 | 21.6 | 22.7 | 23.9 | 25.0 | 26.2 | 27.3 | 28.5 | 29.6 | 30.8 |
| มีเบรก | 13.8 | 15.0 | 16.2 | 17.3 | 18.4 | 19.6 | 20.7 | 21.9 | 23.0 | 24.2 | 25.3 | 26.5 | 27.6 | 28.8 | 29.9 | 31.1 | ||
| RCP6SW | ไม่มีเบรก | 13.7 | 14.9 | 16.1 | 17.2 | 18.3 | 19.5 | 20.6 | 21.8 | 22.9 | 24.1 | 25.2 | 26.4 | 27.5 | 28.7 | 29.8 | 31.0 | |
| มีเบรก | 14.0 | 15.2 | 16.4 | 17.5 | 18.6 | 19.8 | 20.9 | 22.1 | 23.2 | 24.4 | 25.5 | 26.7 | 27.8 | 29.0 | 30.1 | 31.3 | ||
RCP6SW-WRA16R
ST : สโตรค
M.E. : Mechanical end
S.E. : Stroke end
*1 ตรวจสอบให้แน่ใจว่าความยาวรวมของสายแอคทูเอเตอร์และแหล่งจ่ายไฟ/สายเคเบิล/สาย I / O ไม่เกิน 20 ม.
*2 ส่วนรีเลย์สายเคเบิล (ขั้วต่อข้อต่อสายเคเบิล) ภายใน ไม่กันหยดน้ำ
(ข้อควรระวัง) กรณีกลับตำแหน่งเริ่มต้น ก้าน (Rod) จะเคลื่อนที่ไปถึง M.E. โปรดระวังการชนกับวัตถุโดยรอบ
(หมายเหตุ) ในกรณีที่วัตถุที่ขนย้ายมีส่วนยื่นที่มีขนาดใหญ่ หรือจำเป็นต้องปรับมุมให้แม่นยำมาก โปรดติดตั้งวัตถุที่ขนย้ายโดยไม่ต้องใช้รูคว้าน (Reamer hole)
(หมายเหตุ) โปรดดูหน้า 1-344 สำหรับวัสดุของแต่ละส่วน
(หมายเหตุ) รูปภาพด้านล่างเป็นกรณีใช้สเปคมอเตอร์หมุนกลับทางซ้าย (ML)
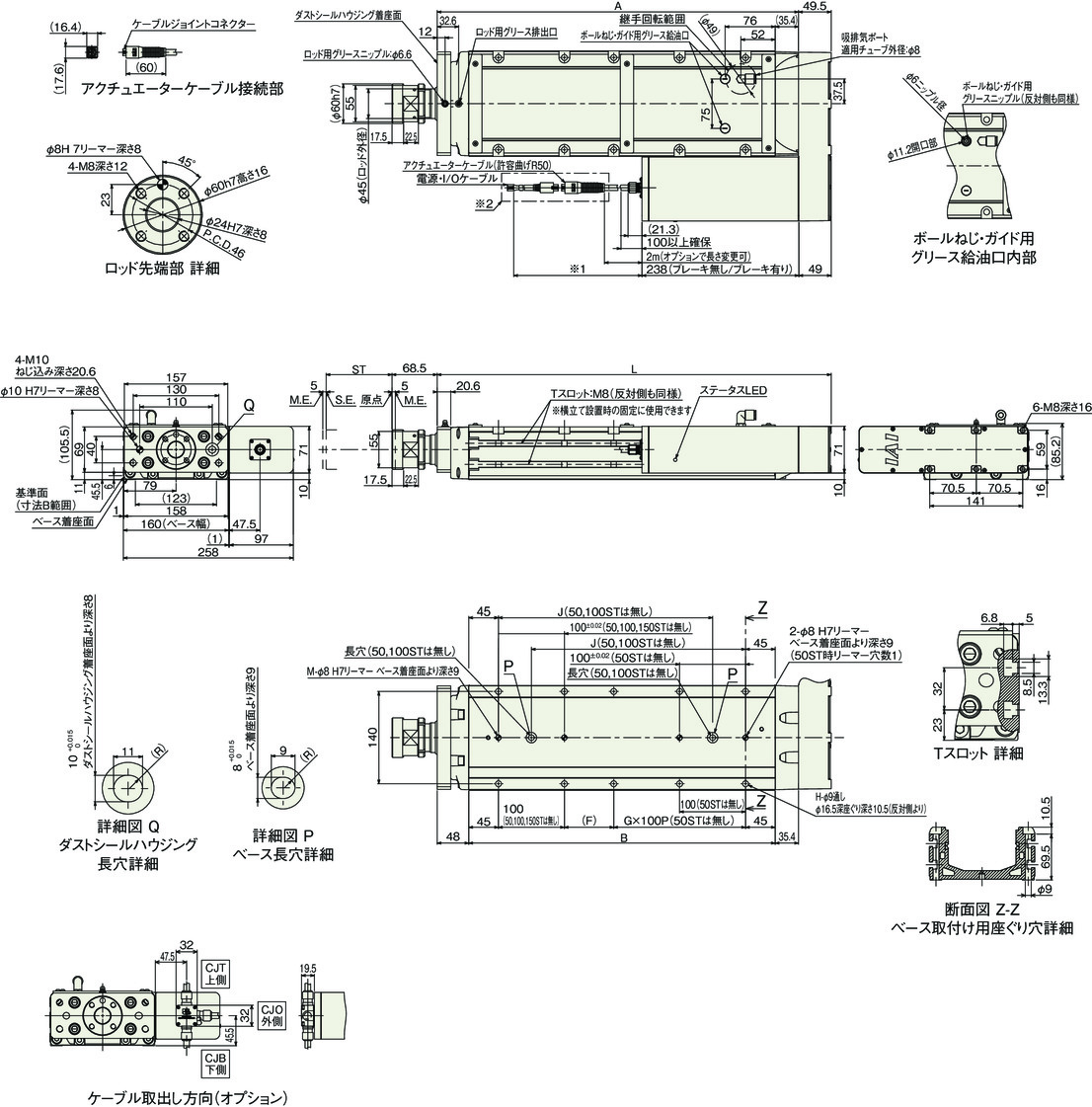
(หมายเหตุ) โปรดดูหน้าก่อนหน้าสำหรับขนาดและน้ำหนักของ RCP6SW ตามสโตรค
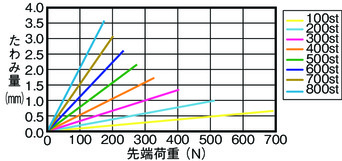
ปริมาณการแอ่นตัวของก้าน (Rod) (ค่าอ้างอิง)
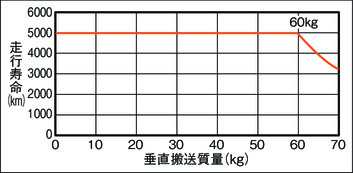
น้ำหนักขนย้ายในแนวตั้งและอายุใช้งานเคลื่อนที่
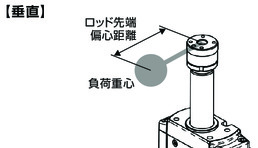
โหลดที่ยอมรับได้ที่ส่วนปลายก้าน (Rod tip)
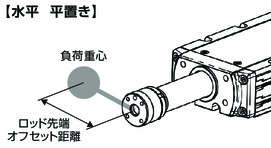
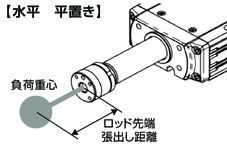
แนวนอน
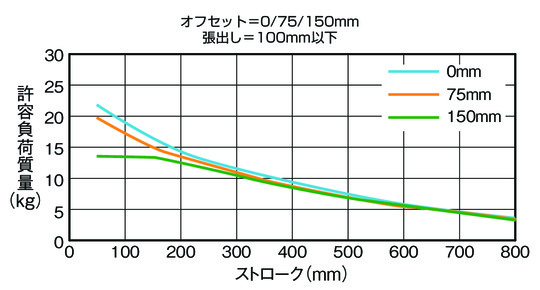
เงื่อนไขการคำนวณน้ำหนักโหลดที่ยอมรับได้
อายุการใช้งานไกด์ (Guide running life) โดยคำนึงถึงโมเม้นท์ที่เกิดจากการเร่ง-ลดความเร็ว
น้ำหนักโหลด 5,000 กม. (ความเร็วเร่ง 0.2G, ความเร็ว 420 มม. / วินาที)
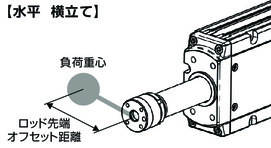
แนวตั้ง
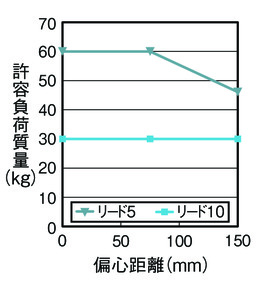
เงื่อนไขการคำนวณน้ำหนักโหลดที่ยอมรับได้
อายุการใช้งานไกด์ (Guide running life) โดยคำนึงถึงโมเม้นท์ที่เกิดจากการเร่ง-ลดความเร็ว
น้ำหนักโหลด 5,000 กม. (ความเร็วเร่ง 0.2G, ความเร็ว 180 มม. / วินาที)
คุณสมบัติ

ตารางน้ำหนักที่ขนย้ายได้ตามความเร็ว / การเร่ง *โปรดดูหน้า 1-25 สำหรับรายละเอียดเกี่ยวกับการตั้งค่าเอาท์พุทสูง
การตั้งค่าโหมดเอาต์พุตสูง เมื่ออุณหภูมิแวดล้อมเกิน 5 ˚C ความเร็วสูงสุดจะแตกต่างกันไปตามมวลการขนส่ง น้ำหนักขนย้ายใช้หน่วย กก. ช่องว่าง หมายถึงไม่สามารถทำงานได้
Lead 20
| ทิศทางติดตั้ง | แนวนอน |
|---|---|
| ความเร็ว | ความเร็วเร่ง (G) |
| (มม./วินาที) | 0.2 |
| 0 | 30 |
| 240 | 30 |
| 300 | 30 |
| 360 | 12 |
Lead 10
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง |
|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |
| (มม./วินาที) | 0.2 | |
| 0 | 60 | 30.5 |
| 88 | 60 | 30.5 |
| 100 | 60 | 20.5 |
| 110 | 60 | 15.5 |
| 120 | 60 | 12.5 |
| 130 | 60 | 10.5 |
| 140 | 60 | 7.5 |
| 150 | 60 | 3.5 |
| 160 | 23 | 1.5 |
| 200 | 23 | |
| 220 | 2 | |
Lead 5
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง |
|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |
| (มม./วินาที) | 0.1 | |
| 0 | 100 | 59 |
| 48 | 100 | 59 |
| 60 | 100 | 29 |
| 70 | 100 | 24 |
| 80 | 100 | 14 |
| 90 | 100 | 5 |
| 100 | 100 | |
| 110 | 45 | |
ตารางน้ำหนักขนย้ายตามความเร็ว/ความเร่ง (การตั้งค่าโหมดเอาต์พุตสูง (ไม่เกิน 5 ˚C))
การตั้งค่าโหมดเอาต์พุตสูง เมื่ออุณหภูมิแวดล้อมไม่เกิน 5 ˚C ความเร็วสูงสุดจะแตกต่างกันไปตามมวลการขนส่ง น้ำหนักขนย้ายใช้หน่วย กก.
Lead 20
| ทิศทางติดตั้ง | แนวนอน |
|---|---|
| ความเร็ว | ความเร็วเร่ง (G) |
| (มม./วินาที) | 0.2 |
| 0 | 30 |
| 240 | 30 |
Lead 10
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง |
|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |
| (มม./วินาที) | 0.2 | |
| 0 | 60 | 30.5 |
| 88 | 60 | 30.5 |
| 100 | 60 | 20.5 |
| 110 | 60 | 15.5 |
| 120 | 60 | 12.5 |
Lead 5
| ทิศทางติดตั้ง | แนวนอน | แนวตั้ง |
|---|---|---|
| ความเร็ว | ความเร็วเร่ง (G) | |
| (มม./วินาที) | 0.1 | |
| 0 | 100 | 59 |
| 48 | 100 | 59 |
| 60 | 100 | 29 |
| 70 | 100 | 24 |
| 80 | 100 | 14 |