

ความเร็วสูงสุดแยกตามสโตรค
(หน่วยเป็น มม./วินาที)
| 200~400 | 500~700 | 800~2200 | |
|---|---|---|---|
| แกน X | - | 1300 | |
| แกน Y | 1200 | - | |
น้ำหนักขนย้ายแยกตามความเร็วเร่ง
หน่วยที่แสดงในตารางคือ กก.
| สโตรคแกน Y | |||||||
|---|---|---|---|---|---|---|---|
| 200 | 300 | 400 | 500 | 600 | 700 | ||
| ความ เร็ว เร่ง | 0.3 | 40.0 | 40.0 | 33.0 | 27.3 | 22.9 | 19.3 |
| 0.4 | 30.0 | 30.0 | 30.0 | 27.3 | 22.9 | 19.3 | |
| 0.5 | 21.6 | 21.6 | 21.6 | 21.6 | 21.6 | 19.3 | |
| 0.6 | 18.0 | 18.0 | 18.0 | 18.0 | 17.5 | 16.6 | |
| 0.7 | 15.3 | 14.9 | 14.0 | 13.0 | 12.1 | 11.2 | |
| 0.8 | 12.2 | 11.3 | 10.4 | 9.4 | 8.5 | 7.6 | |
| 0.9 | 9.5 | 8.6 | 7.7 | 6.7 | 5.8 | 4.9 | |
| 1.0 | 6.8 | 5.9 | 5.0 | - | - | - | |
คอนโทรลเลอร์ที่ใช้ได้
โปรดดูที่หน้าคอนโทรลเลอร์แต่ละตัว (หน้า 8-8) คอนโทรลเลอร์จะจำหน่ายแยก
มาตรฐานต่างประเทศ

ข้อควรระวังในการเลือก
| (1) ช่องสโตรคในรายการโมเดล ที่ระบุในโมเดลแสดงด้วยหน่วย ซม. (เซนติเมตร) (2) ความยาวสายเคเบิลคือระยะตั้งแต่กล่องคอนเน็กเตอร์แกน X (กรณีมีรางกระดูกงูคือนับตั้งแต่สายเคเบิลของแอคชูเอเตอร์แกน X) ไปจนถึงคอนโทรลเลอร์ มาตรฐานคือ 3 ม. หรือ 5 ม. ความยาวอื่นนอกเหนือจากนั้นสามารถใช้หน่วยเมตรได้เช่นกัน สามารถใช้ได้สูงสุด 20 ม. (3) ความเร็วเร่งจำกัดเท่ากับ 0.3G เมื่อเพิ่มความเร็วเร่ง น้ำหนักขนย้ายที่ได้จะลดลง |
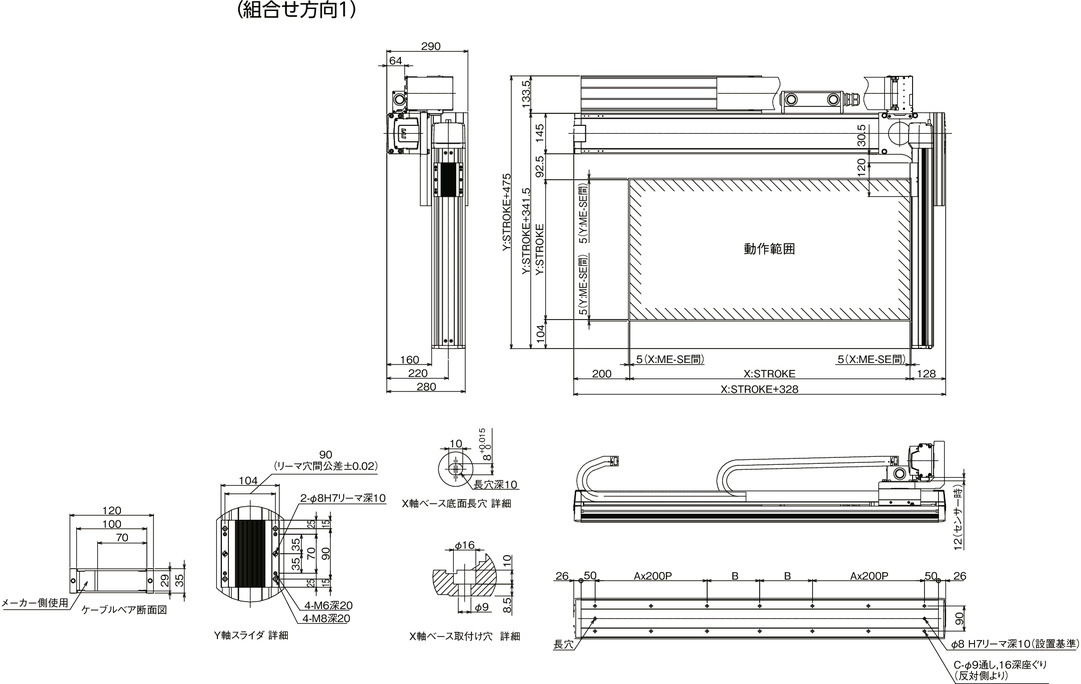
ภาพร่างแสดงขนาด

ICSPA2-B1NA□M-CT (สเปคกระดูกงู) ทิศทางการรวมเข้าด้วยกัน 1
ME : จุดสิ้นสุดเมคานิคัล
SE : จุดสิ้นสุดสโตรค
(ข้อควรระวัง) ตำแหน่งประกอบที่ปรากฏในดรอว์อิ้งจะกลายเป็นจุดเริ่มต้น กรณีจะเปลี่ยนจุดเริ่มต้น โปรดระบุ NM ที่เป็นอ็อปชั่นเสริม และกรณีจะเปลี่ยนจุดเริ่มต้นหลังส่งมอบสินค้าแล้วจะต้องทำการปรับคืน จึงโปรดใช้ความระวัง
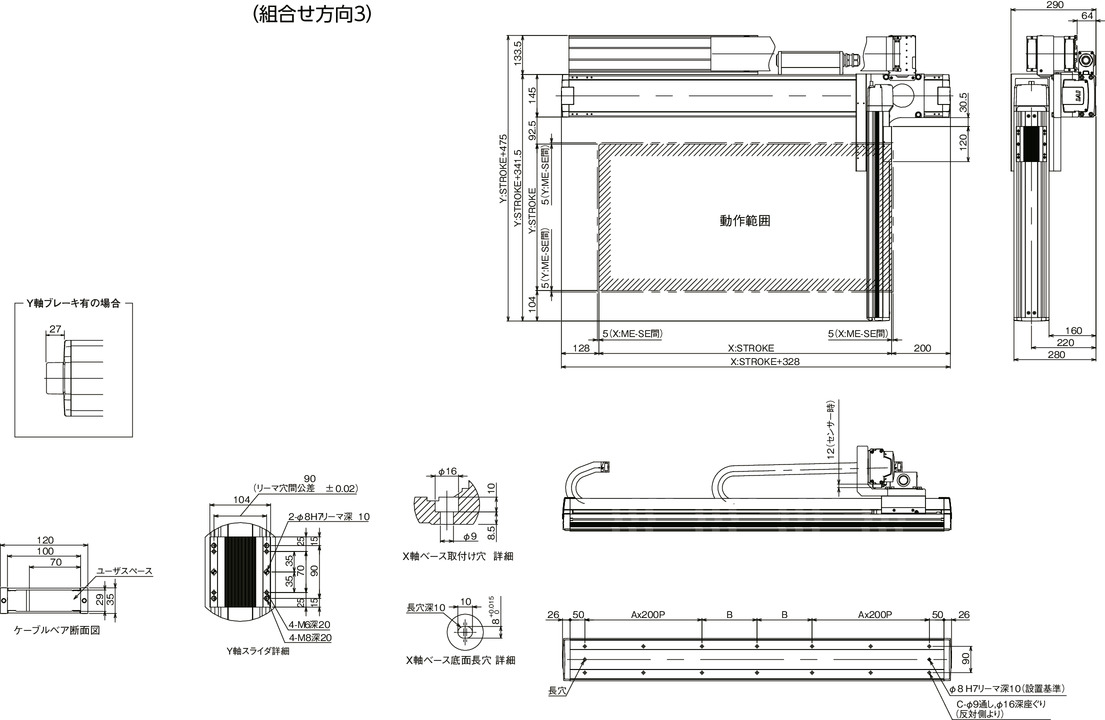
ICSPA2-B1NA□M-CT (สเปคกระดูกงู) ทิศทางการรวมเข้าด้วยกัน 3
(ข้อควรระวัง) ตำแหน่งประกอบที่ปรากฏในดรอว์อิ้งจะกลายเป็นจุดเริ่มต้น กรณีจะเปลี่ยนจุดเริ่มต้น โปรดระบุ NM ที่เป็นอ็อปชั่นเสริม และกรณีจะเปลี่ยนจุดเริ่มต้นหลังส่งมอบสินค้าแล้วจะต้องทำการปรับคืน จึงโปรดใช้ความระวัง
| สโตรค X | 500 | 550 | 600 | 650 | 700 | 750 | 800 | 850 | 900 | 950 | 1000 | 1050 | 1100 | 1150 | 1200 | 1250 | 1300 | 1350 | 1400 | 1450 | 1500 | 1550 | 1600 | 1650 | 1700 | 1750 | 1800 | 1850 | 1900 | 1950 | 2000 | 2050 | 2100 | 2150 | 2200 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 |
| B | 138 | 163 | 188 | 213 | 238 | 263 | 288 | 113 | 138 | 163 | 188 | 213 | 238 | 263 | 288 | 313 | 138 | 163 | 188 | 213 | 238 | 263 | 288 | 313 | 138 | 163 | 188 | 213 | 238 | 263 | 288 | 313 | 138 | 163 | 188 |
| C | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 14 | 18 | 18 | 18 | 18 | 18 | 18 | 18 | 18 | 22 | 22 | 22 | 22 | 22 | 22 | 22 | 22 | 26 | 26 | 26 |
สเปคร่วม
| รูปแบบการขับเคลื่อน | บอลสกรู เทียบเท่าแบบรีด C5 |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.01 มม. |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ไม่เกิน 0.02 มม. |
| ไกด์ | แบบมีตัว Base |
| ฐาน | คุณสมบัติของวัสดุ : อลูมิเนียมชุบผิวสีขาว |
| ส่งกำลังมอเตอร์แกน X / Lead | 400W/20 มม. |
| ส่งกำลังมอเตอร์แกน Y / Lead | 200W/20 มม. |
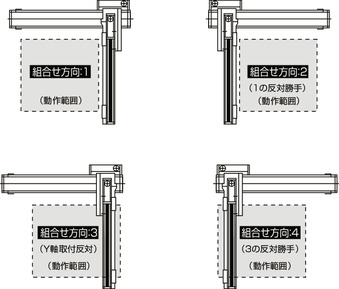
ทิศทาง ประกอบร่วม XY
รายละเอียดโมเดล
| ทิศทาง ประกอบร่วม XY (ข้อควรระวัง 1) | รูปแบบ | ||
|---|---|---|---|
| 1 | ICSPA2-B1NA1M-①-②③-④⑤-T2-⑥-⑦ | ||
| 2 | ICSPA2-B1NA2M-①-②③-④⑤-T2-⑥-⑦ | ||
| 3 | ICSPA2-B1NA3M-①-②③-④⑤-T2-⑥-⑦ | ||
| 4 | ICSPA2-B1NA4M-①-②③-④⑤-T2-⑥-⑦ | ||
(ข้อควรระวัง 1) ทิศทางการประกอบร่วม XY โปรดดูที่ภาพด้านล่าง รายละเอียดของ 1 - 7 ในโมเดลข้างต้น โปรดดูที่ตารางด้านล่างนี้
คำอธิบายสัญลักษณ์ในโมเดล
| เลขที่ | เนื้อหา | รายละเอียดที่ระบุ |
|---|---|---|
| ① | ชนิดเอนโค้ดเดอร์ | A: แบบสัมบูรณ์ I: แบบเพิ่มค่า (Incremental) |
| ② | สโตรคแกน X | 50: 500 มม. ~ 220: 2200 มม. |
| ③ | แกน X อุปกรณ์เสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ④ | สโตรคแกน Y | 20: 200 มม. ~ 70: 700 มม. |
| ⑤ | แกน Y อ็อปชั่นเสริม | โปรดดูตารางอ็อปชั่นเสริม |
| ⑥ | ความยาวสายเคเบิล | 3L: 3m 5L: 5m □L: □m |
| ⑦ | การเดินสายเคเบิลแกน Y (ข้อควรระวัง 2) | CT: รางกระดูกงู |
(หมายเหตุ 2) สำหรับขนาดรางกระดูกงู กรุณาดูหน้า 5-574
แกนโครงสร้าง
| ชื่อเรียกแกน | รูปแบบ | หน้าสำหรับอ้างอิง |
|---|---|---|
| แกน X | NS-LXMSA-①-400-20-②-T2-③-⑧ | 3-617 |
| แกน Y | ISPA-MYM-①-200-20-④-T2-⑤ | - |
(ข้อควรระวัง) โมเดลข้างต้นที่ 1 - 5 โปรดดูที่สัญลักษณ์ภายในโมเดลข้างบน
(ข้อควรระวัง) หมายเลข 8 ในโมเดลข้างต้น จะระบุสัญลักษณ์ตามด้านล่างนี้
NT1: ทิศทางการรวมเข้าแบบมุมฉาก 1 และ 3
NT2: ทิศทางการรวมเข้าแบบมุมฉาก 2 และ 4
(ข้อควรระวัง) รุ่น Nut rotation / ลิเนียร์ขนาดใหญ่ แม้จะเป็นแกนเดี่ยวก็จะมีการติดตั้งรางกระดูกงูมาด้วย แต่กรณีที่ประกอบกับหุ่นยนต์แกนฉากจะมีการใช้งานรางกระดูกงูแยกต่างหาก ดังนั้นแกนเดี่ยวจึงเป็นสเปคที่ไม่มีรางกระดูกงู (NT1 หรือ NT2)