
คุณสมบัติพิเศษของผลิตภัณฑ์





รูปแบบการติดตั้ง


ข้อมูลจำเพาะที่สำคัญ
| รายการ | เนื้อหา | |
|---|---|---|
| อัตราส่วนการลดความเร็ว | 1/30 | |
| การเคลื่อนที่แบบจับยึด | แรงจับยึดสูงสุด (N) (ทั้งสองด้าน) | 6.4 |
| ความเร็วสูงสุดขณะจับยึด (องศา/วินาที) (ด้านเดียว) | 20 | |
| การเคลื่อนที่แบบเข้าใกล้ | ความเร็วสูงสุด (องศา/วินาที) (ด้านเดียว) | 600 |
| ความเร็วต่ำสุด (องศา/วินาที) (ด้านเดียว) | 5 | |
| พิกัดความเร็วเร่ง/ลด (G) (ด้านเดียว) | 0.3 | |
| ความเร็วเร่ง/ลดสูงสุด (G) (ด้านเดียว) | 0.3 | |
| สเปคห้องคลีนรูม | ปริมาณสูญญากาศ (Nl/min) | 10 |
| สโตรค (ด้านเดียว) | สโตรคต่ำสุด (องศา) (ด้านใดด้านหนึ่ง) | 90 |
| สโตรคสูงสุด (องศา) (ด้านเดียว) | 90 | |
| รายการ | เนื้อหา |
|---|---|
| รูปแบบการขับเคลื่อน | เฟืองตัวหนอน +เฟืองเฉียง |
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.01 องศา |
| ความแม่นยำในการกลับจุดเริ่มต้น | - |
| Backlash | ด้านใดด้านหนึ่งไม่เกิน 1 องศา (อย่างไรก็ตาม สปริงจะส่งแรงดันกับด้านที่เปิดเสมอ) |
| ความสูญเสียเนื่องจากการเคลื่อนไหว (Lost motion) | ด้านใดด้านหนึ่งไม่เกิน 0.1 องศา |
| แรงในแนวแกนเพลาที่ยอมรับได้ (โหลดแนวนอนที่ยอมรับได้) | - |
| ระดับความสะอาด | คลาส 10 (0.1 µm, Fed.Std.209D) เทียบเท่าคลาส 2.5 (มาตรฐาน ISO 14644-1) |
| อุณหภูมิ - ความชื้นโดยรอบที่นำไปใช้ | 0-40℃, ไม่เกิน 85%RH (ต้องไม่มีหยดน้ำ) |
| ระดับการป้องกัน | - |
| ทนการสั่นสะเทือน - ทนการกระแทก | 4.9m/s2 |
| มาตรฐานซึ่งรองรับในต่างประเทศ | CE Mark, ตามข้อกำหนด RoHS |
| ชนิดมอเตอร์ | พัลส์มอเตอร์ |
| ชนิดเอนโค้ดเดอร์ | แบบเพิ่มค่า (Incremental) |
| จำนวนพัลส์เอนโค้ดเดอร์ | 800 พัลส์/รอบ |
| ระยะเวลาจัดส่ง | ระบุในโฮมเพจ "สอบถามเรื่องการจัดส่ง" |
คอนโทรลเลอร์ที่ใช้ได้
แอคชูเอเตอร์ในหน้านี้สามารถทำงานได้ด้วยคอนโทรลเลอร์ต่อไปนี้ โปรดเลือกรุ่น (Type) ให้เหมาะสมตามการนำไปใช้งาน
| ชื่อ | รูปลักษณ์ภายนอก | จำนวนแกน ที่เชื่อมต่อได้สูงสุด | แรงดันไฟจ่ายเข้าเครื่อง | รูปแบบการควบคุม | จำนวนจุดที่กำหนดตำแหน่งสูงสุด | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ชุดกำหนดตำแหน่ง | แถวพัลส์ | โปรแกรม | เน็ตเวิร์ค *เลือก | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MSEL-PC/PG |  | 4 | เฟสเดี่ยว AC 100 - 230V | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● *เลือก | ● *เลือก | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (สเปคเน็ตเวิร์คคือ 768) |
| PCON-CYB/PLB/POB |  | 1 | ● *เลือก | ● *เลือก | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 (ML3, SSN, ECM คือ 8) | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3, SSN, ECM ไม่มีข้อมูลตำแหน่ง) | |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(หมายเหตุ) ดูหน้า 8-17 สำหรับตัวย่อเครือข่าย เช่น DV และ CC
มาตรฐานต่างประเทศ


ข้อควรระวังในการเลือก
| (1) ความเร็วในการเปิด/ปิดสูงสุดของ "สเปคหลัก" ระบุค่าความเร็วในการทำงานของด้านใดด้านหนึ่ง ความเร็วในการทำงานสัมพัทธ์เป็นสองเท่าของค่านี้ (2) เมื่อระยะห่างของจุดจับยึดเป็น 0 และระยะยื่นเป็น 0 แรงจับสูงสุดของ "ข้อมูลจำเพาะหลัก" คือค่าผลรวมของแรงจับของนิ้วทั้งสอง สำหรับน้ำหนักชิ้นงานที่ขนย้ายได้จริง โปรดดูที่ "แผนภาพแสดงความสัมพันธ์ระหว่างแรงจับยึดและค่าขีดจำกัดของกระแส" (3) ต้องแน่ใจว่ามีการใช้งานการกดเมื่อจับยึดชิ้นงาน สำหรับรายละเอียด โปรดดูที่หน้า 1-313 (4) แม้จะใช้งานด้วยแอ็บโซลูทอย่างง่าย คอลัมน์ของประเภทเอนโค้ดเดอร์ในรายการแสดงรุ่นก็จะเป็น [I] |
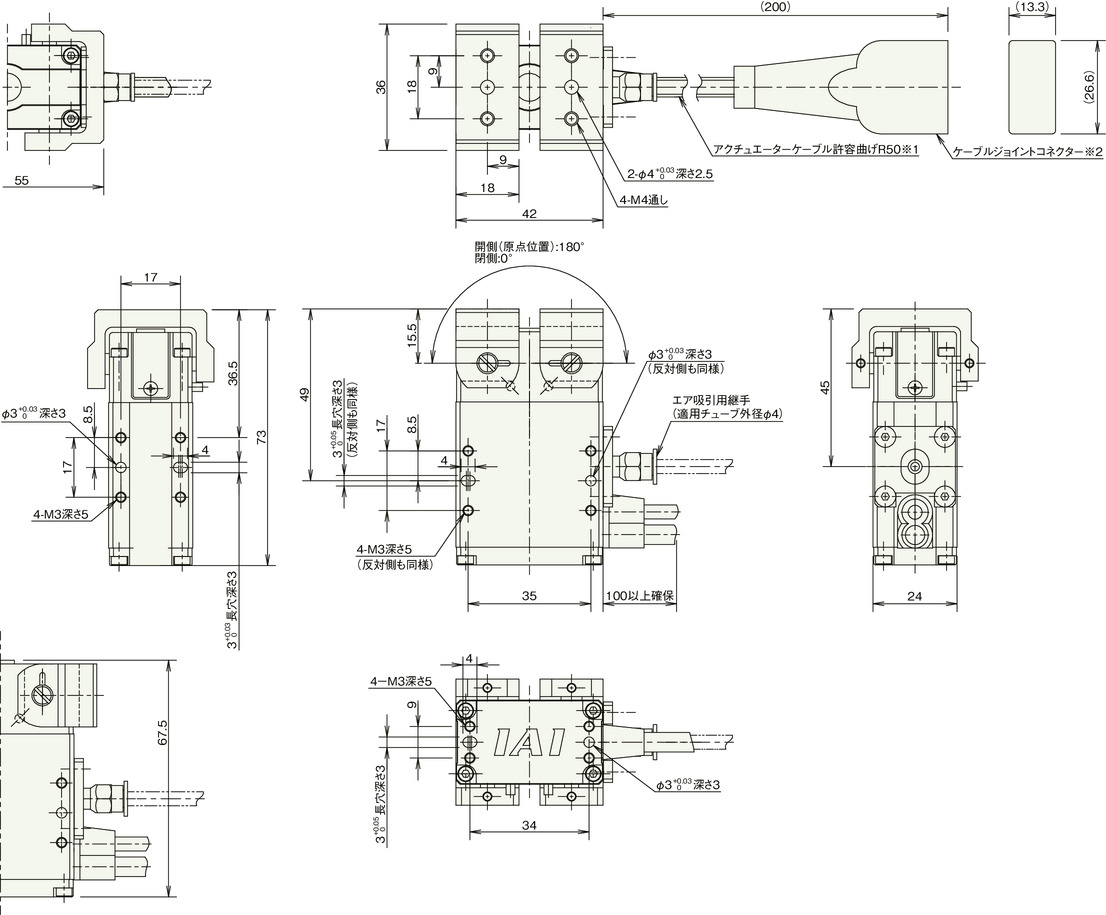
ภาพร่างแสดงขนาด

*1 สายแอคชูเอเตอร์ไม่ใช่สายของชุดหุ่นยนต์
*2 ต่อสายมอเตอร์/เอนโค้ดเดอร์เข้ากับขั้วต่อข้อต่อสาย
(หมายเหตุ) สำหรับสไลเดอร์ ด้านที่เปิดคือจุดเริ่มต้น
น้ำหนักมวลสาร
| รายการ | เนื้อหา |
|---|---|
| น้ำหนักมวลสาร | 0.2 กก. |
ตรวจสอบระยะห่างของจุดจับยึด
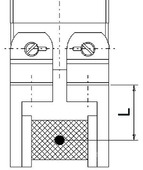
โปรดใช้ระยะจุดจับยึด (L) ที่ระยะไม่เกิน 40 มม.
แผนภาพความสัมพันธ์ระหว่างแรงจับยึดและค่าขีดจำกัดของกระแส
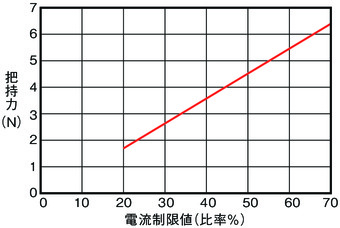
(หมายเหตุ) นี่คือแรงยึดเกาะบนพื้นผิวด้านบนของคันโยก แรงยึดจับที่แท้จริงจะลดลงในสัดส่วนผกผันกับระยะห่างจากจุดศูนย์กลางการเปิด/ปิด คำนวณแรงจับยึดที่มีประสิทธิภาพจากสูตรต่อไปนี้
แรงจับยึดที่มีประสิทธิภาพ (GRLS) = F x 15.5 / (L + 15.5)
(หมายเหตุ) แรงจับยึดคือค่ารวมของกรงจับ (Finger) ทั้งสองข้าง
(หมายเหตุ) เป็นเพียงตัวเลขโดยประมาณ อาจเปลี่ยนแปลงได้สูงสุดประมาณ ± 15%
(หมายเหตุ) เมื่อจับยึด (กดไว้) ความเร็วจะคงที่ ณ 20 องศา/วินาที