
เปิดตัว Power Con Scalar IXP ซีรี่ส์
IXP
จากการใช้ Pluse Motor ทำให้มีราคาที่ต่ำได้
มีคุณสมบัติในระดับ Top class และ Cost performance ที่สูง
เป็นหุ่นยนต์แบบสกาล่า (หุ่นยนต์แบบหลายข้อต่อในแนวระนาบ) ที่มีความเร็วสูง / น้ำหนักขนย้ายสูง / ความแม่นยำสูง ในระดับ Top class

วันที่ 02 เดือนกรกฎาคม 2014 จัดจำหน่าย

IXP
จากการใช้ Pluse Motor ทำให้มีราคาที่ต่ำได้
วันที่ 25 เดือนธันวาคม 2555 จัดจำหน่าย

IX-1000/2000
สามารถขนย้ายได้ในขอบเขตที่กว้างสูงสุด 2400 mm เมื่อเปรียบเทียบกับหุ่นยนต์หลายแกนตั้งฉากที่มีขอบเขตการทำงานกว้างเท่ากัน พื้นที่ที่ใช้ในการติดตั้งอยู่ที่ประมาณ 1/80
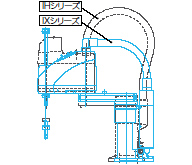
หุ่นยนต์แบบสกาล่า (หุ่นยนต์แบบหลายแกนในแนวระนาบ) IX ซีรี่ส์นั้นได้มีการทบทวนปรับปรุงชิ้นส่วนทั้งหมดของ IH ซีรี่ส์ที่เป็นรุ่นเดิม แล้วทำการออกแบบใหม่ ทำให้คุณสมบัติทั้งด้านความเร็วสูง, น้ำหนักขนย้าย, ความแม่นยำในการกำหนดตำแหน่งทำซ้ำพัฒนาจนอยู่ในระดับ Top class
นอกจากนี้ ยังล้ำหน้ากว่าบริษัทอื่นในเรื่องความสะดวกในการใช้งาน, ความหลากหลาย, Cost performance
| ไซเคิลไทม์มาตรฐาน (※1) | 0.44sec(รุ่นความยาวแขน 500) 0.35sec(รุ่นขนาดเล็กมาก) |
|---|---|
| ความแม่นยำในการกำหนดตำแหน่งทำซ้ำ | ±0.01mm/±0.005 องศา ±0.15mm/±0.005 องศา(รุ่นความยาวแขน 700/800) |
| น้ำหนักขนย้ายสูงสุด | 20kg(รุ่นความยาวแขน 700/800) 1.0kg(รุ่นขนาดเล็กมาก) |

มีขนาดกะทัดรัดมากขึ้น
เมื่อเปรียบเทียบกับรุ่นเดิม (IH ซีรี่ส์)
แขน 1 ใช้วัตถุดิบเป็นอลูนิเนียมอัดขึ้นรูป จึงมีคุณสมบัติทั้งความแข็งแรงและน้ำหนักเบา ทำให้มีความเฉื่อยต่ำ

จากการที่ความเร็วในการประมวลผลของคอนโทรลเลอร์เพิ่มมากขึ้นและความแข็งแรงของตัวเครื่องที่เพิ่มขึ้น ทำให้ความแม่นยำของเส้นทางการเคลื่อนที่เพิ่มขึ้น
นอกจากนี้ ด้วยการเคลื่อนที่แบบ 3D-Arc หรือ 3D-Path ทำให้งานเคลือบสีทำได้อย่างง่ายดายและถูกต้อง
แม้ว่า Point ของ Path จะมีจำนวนมาก แต่ก็สามารถทำได้ในโปรแกรมเพียง 1 บรรทัด
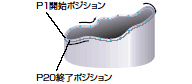
| Command | Operation 1 | Operation 2 |
|---|---|---|
| PATH | P1 | P20 |
ในการเดินสายไฟ ได้ติดตั้งคอนเน็คเตอร์แบบ D-sub25 pin ซึ่งสะดวกต่อผู้ใช้งาน ไว้ที่ส่วนบนของตัวเครื่อง
การเดินท่อของผู้ใช้งาน ได้ติดตั้ง Φ4 ไว้ 2 ท่อน, Φ6 ติดตั้งไว้ 2 ท่อน
นอกจากนี้ จากการติดตั้งสวิทซ์ปลดเบรกไว้ที่ตัวเครื่อง ในกรณีที่แม้ว่าสวิทซ์จ่ายไฟของคอนโทรลเลอร์เป็น OFF ก็สามารถที่จะปลดเบรกได้ (※1)
เนื่องจากได้มีการติดตั้ง Alarm Display อื่นๆไว้ด้วย ดังนั้นจึงสามารถตรวจสอบความผิดปกติที่เกิดขึ้นได้จากบนตัวหุ่นยนต์ (※2)

การโปรแกรมจะใช้ภาษา Super SEL ซึ่งเป็นที่นิยมในหุ่นยนต์แบบหลายแกนตั้งฉาก
ซึ่งเป็นเรื่องที่ง่าย สามารถให้ทำงานที่ซับซ้อนได้ ดังนั้นแม้ว่าจะไม่เข้าใจเรื่องภาษาที่ใช้สั่งงานหุ่นยนต์ ก็สามารถสร้างโปรแกรมได้
จากฟังก์ชั่นกดค้างในแนวแกน Z (แกนตั้ง) ทำให้สามารถใช้ในงาน Press fit ชิ้นงาน หรือควบคุม Torque ได้

ภายในขอบเขตการทำงานสามารถกำหนด Interference check zone ได้สูงสุด 10 ตำแหน่ง
หากเข้ามาภายใน Check zone เครื่องจะส่งสัญญาณออกมา จึงใช้ในการทดสอบการเคลื่อนที่ด้วยความเร็วต่ำ

เนื่องจากในทุกรุ่นมีการใช้ Serial absolute encoder 17 bits
ดังนั้นจึงสามารถกำหนดตำแหน่งได้ด้วยความแม่นยำสูง โดยไม่จำเป็นต้องกลับคืนตำแหน่งเริ่มต้น
นอกจากนี้ ในกรณีที่ต้องรีเซ็ท Absolute การใช้ Jig เฉพาะงานก็สามารถช่วยให้ดำเนินการได้อย่างง่ายดายและถูกต้อง
ความหลากหลายใน IX ซีรี่ส์
ได้กำหนดไว้ 6 รุ่นตามที่ระบุไว้ด้านบน ดังนั้นจึงสามารถตอบสนองต่อการใช้งานได้อย่างกว้างขวาง




สามารถเลือกชมตัวอย่างการยกระดับประสิทธิภาพการผลิตหรือการลดค่าใช้จ่าย รวมถึงตัวอย่างการใช้งานผลิตภัณฑ์ได้


3015.jpg)
50_60_70_80.jpg)